Определение места судна с помощью РЛС
Опознавание береговой черты
Судовая РЛС применяется главным образом для определения места судна по измеренным до ориентиров расстояниям. При наличии точечных или имеющих характерные очертания ориентиров можно для этого использовать и радиолокационные пеленги (РЛП).
Реализация определения места судна с помощью РЛС зависит и от того, как точно опознаны те ориентиры, по которым производятся замеры расстояний (DР) и пеленгов (РЛП).
При подходе к берегу с моря возникает задача опознавания района нахождения судна. Основными признаками для опознавания берега является конфигурация береговой черты, отдельно лежащие в море скалы, островки и т.п.
Опознавание береговых объектов для последующего определения места судна может производиться или способом веера пеленгов и расстояний, или способом траверзных расстояний.
Способ веера пеленгов и расстояний.
Этот способ обычно применяется при изрезанном обрывистом береге или в том случае, когда на берегу (или в море) имеются характерные ориентиры.
Сущность способа состоит в следующем (рис. 21.1):
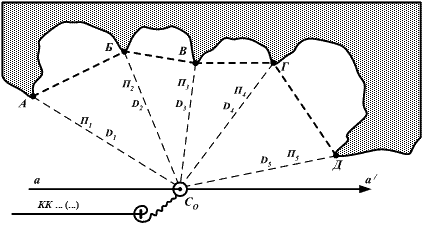
Рис. 21.1. Способ веера пеленгов и расстояний
На экране ИКО РЛС подбираются хорошо видимые и характерные объекты. Затем в быстрой последовательности измеряются РЛП и DР до этих объектов (Ор. А – РЛП1, DР1; Ор. Б – РЛП2, DР2; Ор. В – РЛП3, DР3; Ор. Г – РЛП4, DР4; Ор. Д – РЛП5, DР5). На момент средних наблюдений (Ор. В) замечается  .
.
На листе кальки проводится прямая а–а′ и на ней из произвольной точки (т. С0) прокладываются истинные значения (Пi = РЛПi + ΔК, Di = DРi + ΔDP) всех измеренных пеленгов и расстояний в масштабе путевой навигационной карты.
Соединив штриховой линией (– – –)точки пеленгов, соответствующих измеренным (и исправленным) расстояниям, получаем ломаную линию, которая и будет приближенным изображением контура берега.
Подготовленную таким образом кальку перемещают по путевой карте так, чтобы линия а–а′ всегда оставалась параллельной курсу судна, а ломаная (штриховая) линия в наибольшей степени совпадала бы с изображением берега на карте и чтобы большее число П и D соответствовало характерным ориентирам на берегу, и если так, то это значит, что участок побережья опознан. В т. С0 кальки делается укол циркулем-измерителем и эта точка (т. С0), но уже на путевой навигационной карте, считается ориентировочным местом судна на средний момент наблюдений.
Если скорость судна при измерении радиолокационных пеленгов (РЛП) и расстояний (DР) более 12 узлов, то время и отсчет лага  замечаются при каждом измерении РЛП и DР и прокладка их на кальке производится не из одной точки (т. С0), а из точек, соответствующих месту судна в момент каждого измерения. В дальнейшем – аналогично до укола циркулем-измерителем в точке, соответствующей последнему измерению РЛП и DР.
замечаются при каждом измерении РЛП и DР и прокладка их на кальке производится не из одной точки (т. С0), а из точек, соответствующих месту судна в момент каждого измерения. В дальнейшем – аналогично до укола циркулем-измерителем в точке, соответствующей последнему измерению РЛП и DР.
Место судна этим способом опознается тем точнее, чем больше взято пеленгов и расстояний и чем характернее выражены контуры наблюдаемых ориентиров.
2. Способ траверзных расстояний (рис. 21.2).
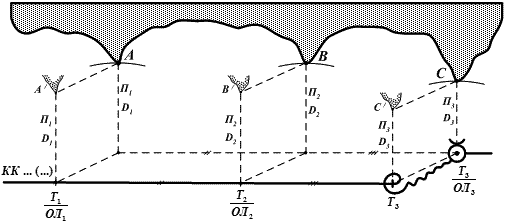
Рис. 21.2. Способ траверзных расстояний
Наблюдатель измеряет расстояния до береговых ориентиров, эхо-сигналы которых видны на экране, когда они приходят на один и тот же курсовой угол, лучше всего на траверз, и в момент измерения расстояний замечает время и отсчет лага . Затем на листе кальки прокладывает линию курса со счислимыми точками каждого измерения  . Из соответствующих точек по КУ и D наносит объекты (А′, В′, С′). Подготовленную таким образом кальку накладывает на путевую навигационную карту и перемещает ее так, как и при первом способе. В результате совпадения ориентиров на кальке и карте наблюдатель получает уточненное положение линии пути и места судна.
. Из соответствующих точек по КУ и D наносит объекты (А′, В′, С′). Подготовленную таким образом кальку накладывает на путевую навигационную карту и перемещает ее так, как и при первом способе. В результате совпадения ориентиров на кальке и карте наблюдатель получает уточненное положение линии пути и места судна.
Дата добавления: 2021-01-26; просмотров: 1100;
Поиск по сайту
Узнать еще
- I. Идентификация потенциально вредных и (или) опасных факторов на рабочих местах.
- I. Определение и структура методов обучения.
- I. Определение условий выполнения рукописи.
- I. Определение, виды радиоактивности, радиоактивные семейства
- Mатематическое определение ОС.
- V — скорость судна, м/с.
- VIII Места занятий, оборудование и спортивный инвентарь
- А) в средних рядах; б-д) в крайних рядах; е) в торцах; ж-и) в местах перепада высот, деформационных и температурных швов (на парных колоннах)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
