Адаптивные интеллектуальные системы управления
Основным мотивом, побудившим использование нечеткого управления, явилось стремление принять во внимание неопределенности или неизвестные вариации параметров и структуры в моделях объектов управления. Подобным образом главная цель адаптивного управления состоит в том, чтобы управлять объектом в присутствии этих неопределенностей. Поэтому естественно объединить упомянутые технологии и проектировать адаптивные нечеткие системы управления или адаптивные нечеткие контроллеры. На рис. показана основная (базовая) структура адаптивной нечеткой системы управления.
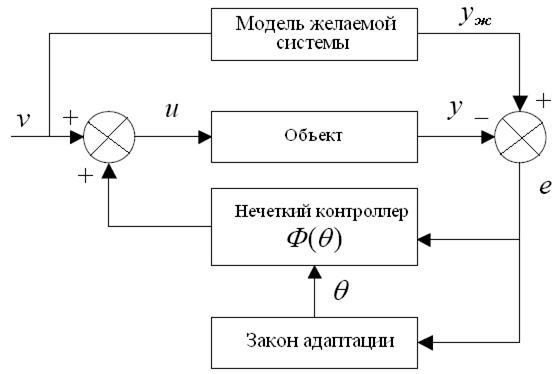
Рис.
Модель желаемой системы используется для определения идеальной характеристики (траектории), которой должна следовать проектируемая система. Предполагается, что объект содержит неизвестные параметры. Нечеткий контроллер конструируется как нечеткая система, параметры  которой настраиваются. Закон адаптации настраивает параметры онлайн так, чтобы выход объекта y(t) воспроизводил (следил) выход модели желаемой системы
которой настраиваются. Закон адаптации настраивает параметры онлайн так, чтобы выход объекта y(t) воспроизводил (следил) выход модели желаемой системы  .
.
Основными достоинствами адаптивных нечетких систем являются:
(1) обычно получаемое более высокое качество, благодаря тому, что адаптивный нечеткий контроллер может приспосабливаться к изменяющимся окружающим условиям, и (2) требуется меньше информации об объекте в связи с тем, что закон адаптации может помочь изучить динамику объекта в процессе выполнения операций в реальном времени. Основными недостатками адаптивных нечетких систем, с другой стороны, являются (1) получающаяся в результате проектирования система оказывается более трудной для анализа, т.к. она является не только нелинейной системой, но и системой с переменными во времени параметрами (нестационарной системой), (2)ее реализация является более затратной.
Хотя адаптивные нечеткие системы и традиционные адаптивные системы по принципу действия и по используемому математическому аппарату, они отличаются между собой в том смысле, что (1) нечеткий контроллер имеет специфическую нелинейную структуру, которая универсальна для различных объектов, в то время как структура традиционного адаптивного контроллера изменяется от объекта к объекту, и (2) человеческие сведения (знания) о динамике объекта и стратегии контроллера могут быть встроены алгоритм работы адаптивного нечеткого контроллера, в то время как такие сведения не учитываются при проектировании традиционного адаптивного контроллера, что является основным преимуществом адаптивных нечетких контроллеров по сравнению с традиционными адаптивными контроллерами.
Человеческие знания о системе управления могут быть двоякого рода: знания об объекте и знания о стратегии управления. В зависимости от человеческих знаний и структуры нечеткого контроллера адаптивные нечеткие контроллер делятся на три категории (вида):
· Непрямое адаптивное нечеткое управление: нечеткий контроллер включает в себя несколько нечетких систем, проектируемых (создаваемых) на основе сведений об объекте.
· Прямое адаптивное управление: нечеткий контроллер состоит из одной нечеткой системы, проектируемой на основе сведений о нечетком контроллере.
· Комбинация непрямого/прямого нечеткого управления: нечеткий контроллер проектируется как взвешенное среднее непрямого и прямого нечетких контроллеров.
Дата добавления: 2021-01-11; просмотров: 919;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
