Моделирование нелинейных динамических процессов (объектов)
Способность нейронных сетей осуществлять нелинейное преобразование
сигналов может быть использовано для моделирования нелинейных динамических объектов. В этом случае модель находится путем обучения нейронной сети, т.е. путем настройки весов так, чтобы минимизировать ошибку моделирования.
Использование нейронных сетей для моделирования поясним на примере дискретного динамического объекта с одним входом и одним выходом. Предположим, что на вход такого объекта поступает управляющая последовательность u [i] , а на выходе с помощью датчика измеряется управляемая последовательность y[i]. Пусть известно, что дискретная модель объекта является моделью второго порядка. Заметим, что выбор порядка модели относится к проблемам идентификации нелинейных систем, но не является предметом данного курса лекций. Тогда общее описание нейронной динамической модели с тремя входными и одним выходным сигналом можно выразить в форме
 . (30)
. (30)
В этом уравнении  обозначает реакцию нелинейного объекта в момент t=(i+1)T, а
обозначает реакцию нелинейного объекта в момент t=(i+1)T, а  - реакцию нейронной динамической модели этого объекта в то же момент времени. Для сравнения линейный аналог этой нейронной модели описывается как
- реакцию нейронной динамической модели этого объекта в то же момент времени. Для сравнения линейный аналог этой нейронной модели описывается как
 (31)
(31)
с параметрами a1, a2, b1 , подлежащими оценке, и называется авторегрессионной моделью (ARX-моделью). Разностный сигнал
e[i+1]= -
управляет процессом настройки весов нейронной модели.
В случае применения для моделирования объектов нейронная сеть обычно подключается параллельно объекту и использует для предсказания смещенные в сторону запаздывания выходные последовательности объекта так, как это показано на рис. 9.

Рис. 9
При таком подключении реакция сети зависит от входа u[(iT)] , а также
от сигналов d1[iT] =y[iT] и d2[iT]= y[(i-1)T], представляющих собой две прошедшие через линии задержки T реализации желаемого сигнала, составляющих ожидаемый выходной вектор сети. В этой ситуации нейронная сеть выполняет функции классической многослойной статической сети.
Для примера рассмотрим моделирование нелинейного динамического
объекта Винера. В нейронной модели этого объекта использовалась сеть с одним скрытым слоем из 25 нейронов. После подбора значений весов тестировалась способность сети к обобщению, для чего на ее вход подавался синусоидальный сигнал. На рис. 10 показаны графики изменения сигнала, полученного на выходе нелинейного объекта (пунктирная линия), и сигнала, имеющего место на выходе нейронной сети.

Рис. 10
Найденная нейронная модель тестируется с помощью свободного запуска (free run»)(рис. 11).
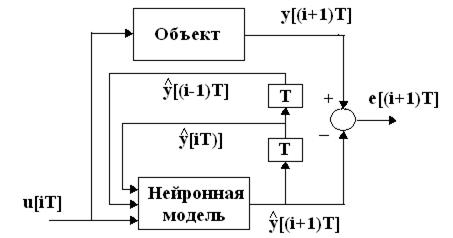
Рис. 11
Термин свободный запуск используется, чтобы подчеркнуть контраст с так называемым предсказанием на один период дискретизации («one-step- ahead prediction») (рис.10). При свободном запуске оценки выходов объекта используются как входы нейронной сети вместо измеренных значений. Таким путем модель может быть использована, чтобы моделировать объект независимо от измеренных настоящего и прошлых значений выхода. Если модель используется для предсказания на несколько периодов дискретизации (на некоторый горизонт), как это необходимо при управлении с предсказанием, свободный запуск представляет собой более дискриминационный тест и более удобен для тестирования модели, чем модель тестирования, опирающаяся на предсказание на один период дискретизации.
Дата добавления: 2021-01-11; просмотров: 775;
Поиск по сайту
Узнать еще
- III. Единство и взаимосвязь процессов воспитания и обучения.
- Автоматизация деловых процессов
- Автоматизация процессов управления перевозками
- Автоматизация процессов эксплуатации недвижимости
- Автоматизация технологических процессов асфальтобетонного завода и контроль качества
- Автоматизация технологических процессов на эмульсионных базах и контроль качества эмульсий
- Автоматизированная разработка программного обеспечения процессов обработки изделий
- Автоматическое управление последовательностью технологических процессов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
