Модель Такаги-Сугено как квазилинейное устройство
Модель ТС можно трактовать как квазилинейное (аффинное) устройство. Чтобы это показать, преобразуем выражение для выхода:

где коэффициенты
 ,
,  ,
, 
представляют собой линейные комбинации параметров  ,
,  ,
,  , а величина
, а величина
является нормированной степенью истинности (возбуждающей силы) i-го правила. Мы записали  явно как функцию e и ce , чтобы подчеркнуть, что контроллер Такаги-Сугено является квазилинейной (аффинной) моделью, т.е. линейной моделью, коэффициенты которой зависят от входных сигналов.
явно как функцию e и ce , чтобы подчеркнуть, что контроллер Такаги-Сугено является квазилинейной (аффинной) моделью, т.е. линейной моделью, коэффициенты которой зависят от входных сигналов.
Коэффициенты («параметры»)  ,
,  и
и  являются выпуклой линейной комбинацией параметров заключений , , . В этом смысле модель (контроллер) ТС можно рассматривать как устройство, преобразующее пространство входов (условий) в пространство параметров квазилинейной модели, как схематически показано на рис. 4 для r=2, N=9, =0.
являются выпуклой линейной комбинацией параметров заключений , , . В этом смысле модель (контроллер) ТС можно рассматривать как устройство, преобразующее пространство входов (условий) в пространство параметров квазилинейной модели, как схематически показано на рис. 4 для r=2, N=9, =0.
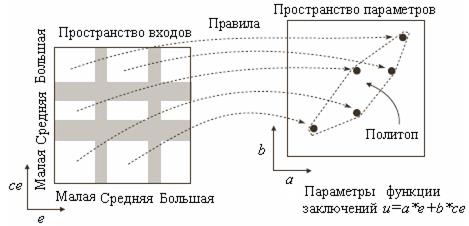
Рис. 4
Примечание. Политоп – выпуклый многогранник.
Пример 2.4 (Такаги-Сугено). Пусть мы имеем два правила.
1. Если ошибка есть Большая, то выход есть Линия 1.
2. Если ошибка есть Малая, то выход есть Линия 2.
Линия 1 определяется уравнением  =0,2*ошибка+90 и линия 2 определяется как
=0,2*ошибка+90 и линия 2 определяется как  =0,6* ошибка +20. Эти правила осуществляют интерполяцию двух линий в диапазоне (рис. 5,a), где функции принадлежности термов Большая и Малая перекрываются (рис. 5,б). Вне этого диапазона выход является линейной функцией ошибки.
=0,6* ошибка +20. Эти правила осуществляют интерполяцию двух линий в диапазоне (рис. 5,a), где функции принадлежности термов Большая и Малая перекрываются (рис. 5,б). Вне этого диапазона выход является линейной функцией ошибки.
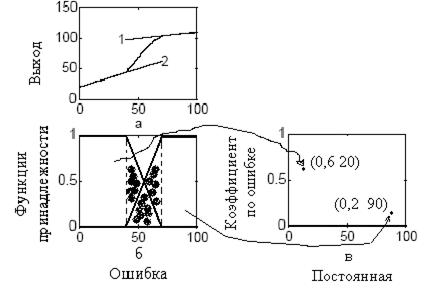
Рис. 5
Этот вывод вытекает из выражения для выхода
 .
.
Подобный вид модели нечеткого логического выхода используется в нейронечетких системах.
Чтобы применить данную модель, точнее нейронечеткую систему, для моделирования динамики конкретного объекта управления, ее вход обычно расширяют за счет прошлых значений сигналов входа u и выхода y этого объекта. В области дискретного времени выход модели ym с верхним индексом, относящимся к модели, и выход объекта yp с верхним индексом, относящимся к объекту, связаны как
ym[i+1] =  (yp[i],…, yp[i − n+1];u[i],…, u[i − m+1]).
(yp[i],…, yp[i − n+1];u[i],…, u[i − m+1]).
Здесь представляет собой нелинейную функцию, связывающую выход и вход модели (т.е. аппроксимацию функции f, связывающей выход и вход этого объекта). Разумеется, что речь идет о дискретной модели объекта управления, как это видно из уравнения для ym[i+1].
Дата добавления: 2021-01-11; просмотров: 583;
Поиск по сайту
Узнать еще
- API как средство интеграции приложений.
- I. Общая характеристика категории состояния как часть речи
- IP как протокол без установления соединения
- IV. Структурно-иерархическая модель личности Реймонда Кеттела
- MatLab как научный калькулятор
- V. Проблемное обучение как основной путь активизации учащихся.
- А) Назначение и устройство
- А) Почва как жилище и убежище

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
