Методы обнаружения дефектов
Все методы обнаружения можно разделить на три группы: осмотра, индикации и поиска.
Если известно, что объект отказал или нештатно работает, то вначале необходимо выполнить визуальный осмотр компонентов плат, и проводников в схеме. При этом часто обнаруживаются сгоревшие, поврежденные компоненты или дефектные соединения, сгоревшие проводники.
Указанный визуальный контроль является частным случаем органолептического контроля, когда для контроля даже в ходе функционирования объекта используются органы чувств человека, что позволяет по нагреву объекта, запаху, вибрациям определить наличие дефекта и прекратить функционирование объекта до появления отказа. Автоматическая индикация находит применение для различных объектов, в которых размещается определенное количество различных датчиков в соответствии с требуемой глубиной контроля, которые сигнализируют о возникновении дефекта. Такими датчиками могут быть интеллектуальные термометры, термопары, и другие элементы, реагирующие на перегрузки. В данном случае, весьма эффективным средством могут быть тепловизоры, которые с высокой точностью представляют оператору текущий тепловой портрет объекта контроля. Который при сравнении со стандартным портретом позволяет определить место возможного дефекта.
В объектах, которые могут быть представлены как системы с последовательной обработкой информации возникший дефект может быть обнаружен путем индикации прохождения сигнала (см. рис. 13.8).
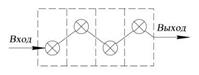
Рис. 13.8. Схема индикации прохождения сигнала в объекте
В общем случае поиск дефекта осуществляется путем построения умозаключения, состоящих в непрерывном сужении с области поиска местонахождения дефекта, принятия логических решений и выполнения рациональных проверок. Здесь под проверкой понимается сверка реального состояния проверяемого (тестируемого) с установленным в конструкторской и эксплуатационной документации. Подобный подход сокращает количество проверок, что не только экономит время, но и сводит к минимуму вероятность ошибок. Для выбора последовательности проверок необходимо знать, как те или иные дефекты влияют на состояние ОД. Эта цель достигается двумя путями:
- моделирования дефекта;
- анализ диагностической модели ОД;
Моделирование дефектов находит применение, как для непрерывных, так и дискретных ОД. Так, можно набрать модель, реализующую передаточную функцию  (например, рис. 13.7), вводить дефекты в нее и анализировать реакцию в виде переходной характеристики
(например, рис. 13.7), вводить дефекты в нее и анализировать реакцию в виде переходной характеристики  , определяя и отслеживая деформацию выходного сигнала. Результаты эксперимента могут быть сведены в таблицу 13.1.
, определяя и отслеживая деформацию выходного сигнала. Результаты эксперимента могут быть сведены в таблицу 13.1.
Таблица 13.1.
Переходные характеристики передаточной функции объекта в зависимости от вида дефекта
| Дефект | Вид 
|
Короткое замыкание 
| 
|
Обрыв 
| 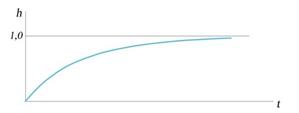
|
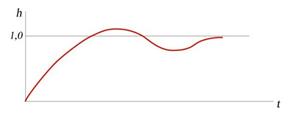
| Снижение коэффициента усиления | 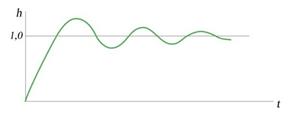
|
Моделирование дефектов представленных в таблице 13.1 легко осуществляется в математическом пакете MathLab.
Спецификой дискретных объектов и релейно-контактных систем является наличие на выходе жестко заданной импульсной последовательности, получаемой в результате логической функции. Имитируя различные дефекты (обрыв, короткое замыкание и т.п) для каждого из них определяется выходной сигнал  . Исходная диагностическая информация должна быть подвергнута тщательному анализу. С этой целью для каждого ОД заранее можно составить таблицу, отражающую взаимосвязь между элементами ОД и диагностическими признаками, содержащимися в исходной диагностической информации и соответствующим этим элементам. Число строк этой таблицы должно быть равно числу элементов ОД, а число столбцов – количеству признаков, которыми сопровождается отказ ОД. На пересечении строки соответствующей данному элементу и столбца, соответствующего возможному диагностическому признаку ставиться единица, если отказ элемента сопровождается данным признаком, или ноль – в противном случае. При этом следует иметь ввиду, что отказы различных элементов могут сопровождаться одним и тем же признаком, а отказ одного и того же элемента различными признаками.
. Исходная диагностическая информация должна быть подвергнута тщательному анализу. С этой целью для каждого ОД заранее можно составить таблицу, отражающую взаимосвязь между элементами ОД и диагностическими признаками, содержащимися в исходной диагностической информации и соответствующим этим элементам. Число строк этой таблицы должно быть равно числу элементов ОД, а число столбцов – количеству признаков, которыми сопровождается отказ ОД. На пересечении строки соответствующей данному элементу и столбца, соответствующего возможному диагностическому признаку ставиться единица, если отказ элемента сопровождается данным признаком, или ноль – в противном случае. При этом следует иметь ввиду, что отказы различных элементов могут сопровождаться одним и тем же признаком, а отказ одного и того же элемента различными признаками.
Указанная взаимосвязь между элементами ОД (рис. 13.9) и признаками, сопровождающими их отказ, отражена в таблице 13.2 состояний.
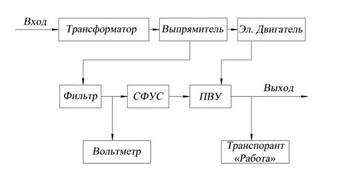
Рис. 13.9. Структурная схема диагностирования блока питания
Таблица 13.2
| Наименование элементов | Диагностические признаки и их номера | Кодовое число | ||
| Отсутствие сигнала на выходе (1) | Отсутствие шума работающего эл. двигателя (2) | Несоответствие показаний вольтметра (3) | ||
| Трансформатор | ||||
| Выпрямитель | ||||
| Электродвигатель | ||||
| Фильтр | ||||
| Схема формирования управляющего сигнала | ||||
| Програмано-временное устройство |
В таблице 13.2 отказ каждого элемента ОД сопоставляется с некоторым кодовым числом. Кодовое число элемента составляется из номеров тех признаков, которые сопровождают его отказ. Например, трансформатора и выпрямителя может сопровождаться всеми тремя признаками, поэтому им соответствует одно и тоже кодовое число 123, а отказ фильтра – только первым и третьим признаками, поэтому ему соответствует кодовое число 13. Если в таблице 13.2. отсутствую одинаковые кодовые числа, то это свидетельствует о достаточности исходной диагностической информации для однозначного определения отказавшего элемента по его кодовому числу. Например, если при отказе ОД наблюдаются первый и второй признаки, а третий признак отсутствует, то это свидетельствует об отказе электродвигателя. Если в результате анализа исходной диагностической информации не удается однозначно определить отказавший элемент, а можно лишь указать часть объекта, где он находиться, то необходимо эту часть объекта подвергнуть дополнительным проверкам. При этом сразу же встает вопрос о выборе такого метода, который позволял бы обнаружить отказавший элемент за минимальное время.
Наиболее распространенными методами поиска отказа являются метод поэлементных проверок и метод групповых проверок.
Необходимость получения информации возникает всякий раз, когда есть какая-то неопределенность состояния системы или неопределенность исхода некоторого испытания. В частности, состояние отказавшей системы, состоящей из N элементов, является неопределенным, поскольку неизвестно, какой из элементов неисправен.
Для того чтобы ответить на вопрос, отчего зависит неопределенность состояния системы, рассмотрим систему, состоящую из Nэлементов, коэффициенты отказа  которых одинаковы и равны
которых одинаковы и равны  Следовательно, общее число возможных состояний отказавшей системы равно числу элементов N при условии, что отказавшим в системе может быть только один элемент. Очевидно, неопределенность состояния такой системы Н(N) будет зависеть от числа возможных ее состояний, т.е.N. Если N =I, то вообще нет никакой неопределенности, так как ясно, что отказал именно этот
Следовательно, общее число возможных состояний отказавшей системы равно числу элементов N при условии, что отказавшим в системе может быть только один элемент. Очевидно, неопределенность состояния такой системы Н(N) будет зависеть от числа возможных ее состояний, т.е.N. Если N =I, то вообще нет никакой неопределенности, так как ясно, что отказал именно этот
единственный элемент. По мере увеличения числа элементов N неопределенность состояния системы становится больше.
Таким образом, мера неопределенности состояния системы или ее энтропия зависит от числа элементов N, причем Н(N=I)= 0, а при увеличении N H(N) возрастает.
Помимо числа состояний системы ее неопределенность зависит от вероятностей этих состояний. Существование такой зависимости легко подтверждается следующими примерами. Пусть имеется система, состоящая из двух элементов (N=2), коэффициенты отказа которых  ,
,  . Такая система обладает очень малой неопределенностью, так как при возникновении отказа системы с большой вероятностью можно утверждать, что отказал первый элемент ( ). В такой же системе (N = 2), коэффициенты отказа элементов которой равны, т.е.
. Такая система обладает очень малой неопределенностью, так как при возникновении отказа системы с большой вероятностью можно утверждать, что отказал первый элемент ( ). В такой же системе (N = 2), коэффициенты отказа элементов которой равны, т.е.  , уже трудно предсказать, какой из элементов отказал при отказе системы. В данном случае с одинаковой вероятностью может отказать как первый, так и второй элемент, т.е. неопределенность состояния системы будет большей, чем в первом случае.
, уже трудно предсказать, какой из элементов отказал при отказе системы. В данном случае с одинаковой вероятностью может отказать как первый, так и второй элемент, т.е. неопределенность состояния системы будет большей, чем в первом случае.
Таким образом, неопределенность состояния отказавшей системы зависит как от числа ее состояний, так и от вероятностей этих состояний.
Для практики важно уметь численно оценить степень неопределенности состояния отказавшей системы. Для этого используется логарифмическая функция. В этом случае энтропия как мера не определенности состояния системы, имеющей N равновероятных состояний, будет H(N)=  .
.
Для получения выражения, позволяющего определить энтропию состояния системы, рассмотрим систему, состоящую из N элементов, коэффициенты отказа которых одинаковы и равны  .Так как общая неопределенность состояния системы по нашему условию равна logN, то можно считать, что отказ любого из элементов (вероятность этого события
.Так как общая неопределенность состояния системы по нашему условию равна logN, то можно считать, что отказ любого из элементов (вероятность этого события  )вносит неопределенность равную
)вносит неопределенность равную
Если же коэффициенты отказа элементов системы различны, то тогда, очевидно, можно считать, что отказ -го элемента вносит неопределенность, равную  . Просуммировав "вклады" всех N элементов, получим выражение для определения среднего значения энтропии состояния отказавшей системы:
. Просуммировав "вклады" всех N элементов, получим выражение для определения среднего значения энтропии состояния отказавшей системы:
 (13.8)
(13.8)
Основанием логарифма в (13.8) может быть любое положительное число а > 1. На практике обычно пользуются логарифмом при основании 2, что позволяет измерять энтропию в двоичных единицах. Нетрудно убедиться в том, что при выборе 2 в качестве основания логарифма за единицу измерения энтропии принимается неопределенность состояния простейшей системы (N=2), имеющей два равновероятных состояния. Действительно, в соответствии с (13.8)

Английское слово bit образовано с помощью сжатия слов binarydigit, означающих "двоичная цифра", или "двоичная единица".
Энтропия, как мера неопределенности состояния системы обладает рядом свойств, оправдывающих ее выбор в качестве характеристики меры неопределенности. Рассмотрим эти свойства.
1. Энтропия обращается в нуль, когда одно из состояний системы достоверно, а все другие невозможны. Действительно, в этом случае все коэффициенты отказа в (13.8) обращаются в нуль, кроме одного, например  , который равен единице. Член
, который равен единице. Член  =0, так как log1= 0. Остальные члены также равны нулю, поскольку при =0
=0, так как log1= 0. Остальные члены также равны нулю, поскольку при =0  .Для доказательства этого следует применить правило Лопиталя к функции
.Для доказательства этого следует применить правило Лопиталя к функции 
2. Энтропия состояния системы с конечным множеством состояний становится максимальной, когда эти состояния равновероятны.
3. Энтропия состояния системы обладает свойством аддитивности, т.е. когда несколько независимых систем объединяются в одну, их энтропии складываются:
 (13.9)
(13.9)
Как уже отмечалось, при получении информации о состоянии системы неопределенность ее состояния уменьшается. Чем больше объем получаемой информации, тем меньше будет неопределенность состояния системы. Если же в результате испытания выясняется, в каком из состояний находится система (какой элемент отказал), то неопределенность состояния системы становится равной нулю. Следовательно, если до получения информации, т.е. до проведения испытания, энтропия состояния системы равна  , а после получения информации
, а после получения информации  , то можно записать
, то можно записать
 (13.10)
(13.10)
где  - среднее значение количества информации, полученной при снятии неопределенности состояния системы [см. выражение (6.2.1)].
- среднее значение количества информации, полученной при снятии неопределенности состояния системы [см. выражение (6.2.1)].
Если состояние системы выясняется путем проведения ряда испытаний (проверок), то можно говорить об информации, полученной в результате проведения одного испытания или ряда испытаний. Так, если до-го испытания энтропия состояния системы  , а после испытания
, а после испытания  , то ожидаемое количество информации, полученной в результате проведения j-го испытания, будет
, то ожидаемое количество информации, полученной в результате проведения j-го испытания, будет
 (13.11)
(13.11)
Таким образом, процесс получения информации является одновременно процессом уменьшения энтропии. Только там, где есть неопределенность, может быть получена информация.
Дата добавления: 2016-09-26; просмотров: 3204;
Поиск по сайту
Узнать еще
- I. История открытия и методы исследования вирусов
- II. Категории и методы политологии.
- III. Методы искусственной физико-химической детоксикации.
- Абсолютный возраст горных пород и методы его определения
- Автоматические методы изготовления фотошаблонов.
- Агротехнические методы (приемы) обработки почвы.
- Административные методы управления природопользованием
- АКТИВНЫЕ МЕТОДЫ ПРОФКОНСУЛЬТАЦИЙ И ПРОФОРИЕНТАЦИОННЫЕ ИГРЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
