ЭЛЕКТРОННЫЕ СИСТЕМЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ ESP
Основной задачей электронной системы стабилизации траектории ESP (Electronic Stability Programm) является предотвращение выхода автомобиля за пределы полосы движения на повороте при ошибочных действиях водителя (например, при попытке пройти поворот со слишком высокой скоростью в момент начала заноса и т. д.).
Система ESP (рис. 5.15) включает в себя: датчики, электронный блок управления, гид равлическую систему подтормаживания того или другого колеса и систему управления двигателем.
В системе подтормаживания задействованы агрегаты антиблокировочной системы авто мобиля (АБС). Электронный блок управления (ЭБУ) постоянно получает и анализирует сигналы от датчиков угла поворота рулевого колеса, бокового ускорения, угловой скорости вращения кузова относительно вертикальной оси, частоты вращения колес. В момент, когда сочетание показаний датчиков воспринимается ЭБУ как приближение к критическому режиму (занос, начало бокового скольжения), он выдает сигнал гидравлической системе подтормаживания и блоку управления двигателем. При этом одно или несколько колес одного борта начинают подтормаживаться, что приводит к возникновению поворачивающего момента относи тельно вертикальной оси, который предотвращает развитие аварийной ситуации (рис. 5.16). Одновременно воздействие на блок управления двигателем позволяет уменьшить подачу то плива и снизить скорость движения до безопасного уровня.
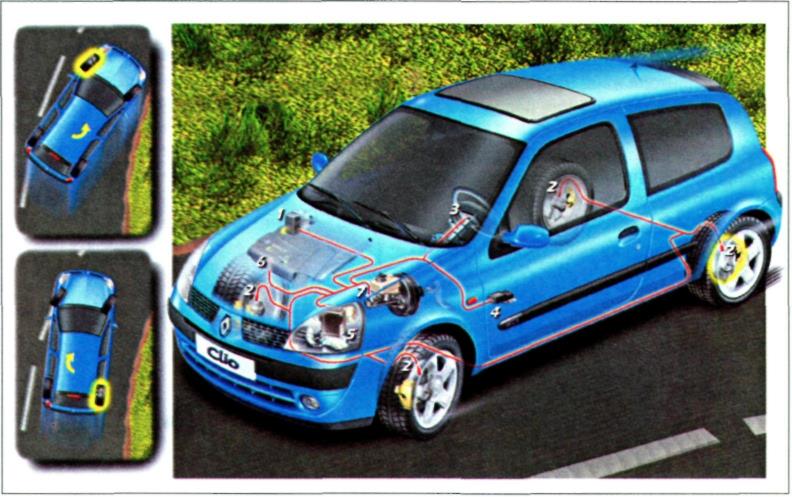
Рис. 5.15. Электронная система стабилизации траектории:1 — блок управления АБС; 2 — датчик скорости вращения колес; 3 — датчик угла поворота руля; 4 — датчик бокового ускорения и угловой скорости; 5 — электронный блок управления (ЭБУ); 6 — электропривод дроссельной заслонки (бензиновый двигатель) или ТНВД (дизель); 7 — датчик давления в тормозной системе
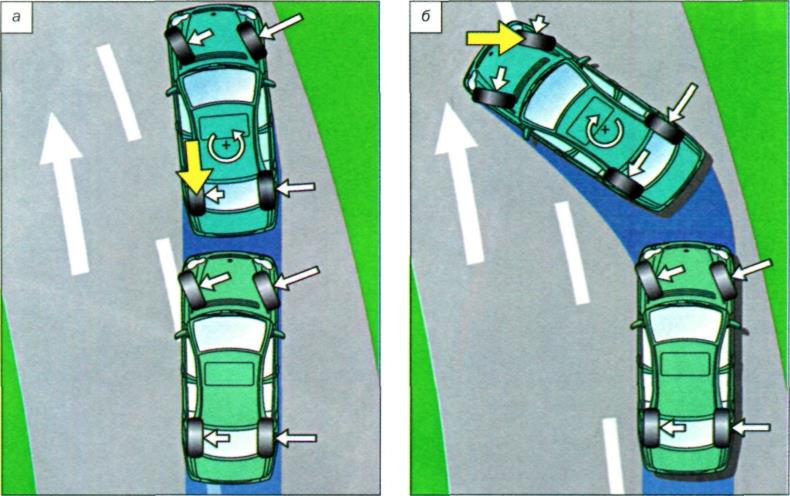
Рис. 5.16. Поворот в критической ситуации: а — при сносе; б — при заносе
§32
Дата добавления: 2016-09-06; просмотров: 1902;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
