НАЗНАЧЕНИЕ РУЛЕВОГО УПРАВЛЕНИЯ. СПОСОБЫ ПОВОРОТА АВТОМОБИЛЯ
Поскольку орган управления — рулевое колесо — постоянно находится в руках водителя, оно на современных автомобилях выполняет также информационную функцию — по усилиям, вибра циям на рулевом колесе происходит передача водителю информации о состоянии дорожного по крытия, нагруженности контакта колес с дорогой.
Рулевое управление автомобиля должно обеспечивать ощущаемую водителем связь между углом поворота рулевого колеса и направлением движения автомобиля, обладать высокой надежностью. Усилия, необходимые для управления, не должны приводить к повы шенной утомляемости водителя и в тоже время должны информировать его о состоянии кон такта управляемых колес с дорогой (обеспечивать «чувство дороги»). От рулевого управления зависит минимальный радиус поворота автомобиля на ограниченных площадях. Конструк ция рулевого управления не должна передавать ударные нагрузки от неровностей дороги на руки водителя.
Все перечисленные выше требования учитываются при проектировании рулевого управ ления.
Изменить направление движения автомобиля можно двумя различными способами: за счет поворота колес или звеньев автомобиля в горизонтальной плоскости (кинематический способ) или за счет создания на колесах правого и левого борта различных по величине или по направлению продольных сил (силовой способ) (рис. 5.1г).
Для управления большинством современных автомобилей применяется кинематический способ, который может быть реализован путем:
— поворота управляемой оси (рис. 5.1а);
— поворота управляемых колес (рис. 5.16);
— поворота сочлененных звеньев (складывания рамы) (рис. 5.1в).
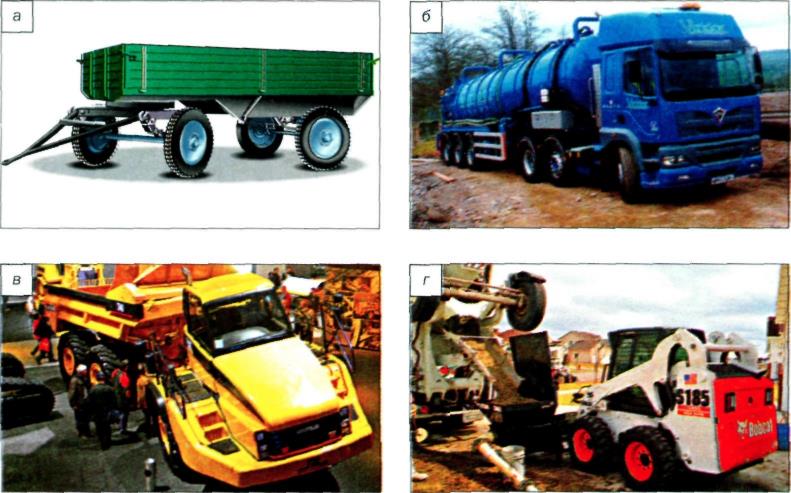
Рис. 5.1. Способы поворота колесной машины: а — за счет поворота оси; б — за счет поворота управляемых колес; в — складыванием рамы; г — силовым способом
Поворот управляемой оси — это наиболее старый из известных способов управления. Он применялся еще на двухосных гужевых повозках. При таком способе ось с колесами повора чивалась относительно шкворня, установленного в центре повозки. Система управления получалась очень простой, но требовала сильного сужения передней части кузова для пере катывания управляемых колес, не обеспечивала демпфирования ударов от неровностей дороги на органы управления и при предельных углах поворота оси возникала опасность бокового опрокидывания из-за уменьшения площади опоры автомобиля.
Для частичного устранения указанных недостатков пытались заменить управляемую ось одним колесом, установленным по центру автомобиля (например, автомобиль К. Бенца (см. рис. 1.2). В настоящее время такая схема поворота осталась на двух- и трехколесных транспортных средствах. Поворот управляемой оси сегодня применяется только на прицепах. Принцип управления за счет поворота сочлененных звеньев применяется в случае, когда колеса транспортного средства имеют большие размеры и поворот каждого из них затруд нен. Несущая система транспортного средства состоит из двух частей, к каждой из которой присоединена передняя и задняя оси. Обе части соединены друг с другом подвижно с помо щью вертикального шкворня. Относительный поворот частей («складывание» рамы или иной несущей системы) происходит с помощью гидравлических цилиндров рулевого управления. К недостаткам данной схемы относится низкая точность управления при высоких скоростях, трудность размещения кузовов или кабин на двух подвижных частях рамы, усложнение трансмиссии. В связи с этим данный способ рулевого управления на современных автомо билях применяется редко, основная сфера использования — тихоходные тракторы, дорож-
но-строительные машины, специальные вездеходы и т. п.
Наибольшее распространение в конструкции автомобиля получило рулевое управление с по воротными колесами. В этом случае каждое управляемое колесо может поворачиваться в гори зонтальной плоскости относительно собственной оси поворота. Для синхронизации поворота правого и левого колеса одной оси они связаны шарнирным механизмом — рулевой трапецией.
S. Заказ № 1031. 225
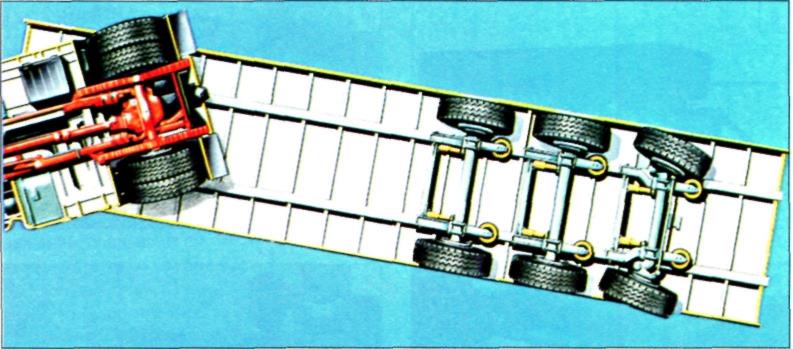
Рис. 5.2. Самоустанавливающаяся ось полуприцепа
Рулевая трапеция обеспечивает поворот правого и левого колес на разные углы, что по зволяет им катиться на повороте по разным радиусам без проскальзывания.
Основные преимущества указанной схемы поворота: колеса занимают при поворотах не большой объем внутри кузова, что позволяет удобно размещать над управляемым мостом другие агрегаты автомобиля (двигатель, трансмиссию и т. д.); для поворота колес требуются незначительные усилия, близкое расположение колеса к оси его поворота уменьшает удары, передающиеся от дороги на рулевое управление.
Двухосный автомобиль имеет, как правило, одну переднюю ось с управляемыми колесами. Иногда для улучшения маневренности такие автомобили снабжают всеми управляемыми колесами, но при этом усложняется конструкция рулевого управления и возникают пробле мы с управляемостью на высоких скоростях. Поэтому на автотранспортных средствах с пе редними и задними управляемыми колесами при движении с высокими скоростями прину дительное управление задними колесами отключают, а колеса фиксируются в нейтральном положении.
Для современных скоростных легковых автомобилей конструкция подвески задних не управляемых колес и наличие упругих резинометаллических шарниров крепления рычагов к несущей системе (эластокинематика подвески) обеспечивает при движении на повороте незначительные углы поворота колес из-за крена кузова и действия на колеса боковых сил. Это явление называется «доворотом» неуправляемых колес и при правильно спроектирован ной подвеске позволяет улучшить управляемость в скоростных поворотах.
Одну ось с управляемыми колесами могут иметь и трехосные автомобили, но при усло вии, что вторая и третья неуправляемые оси сближены. Если эти оси разнесены или автомо биль имеет более трех осей, то для предотвращения бокового проскальзывания колес при меняют несколько осей с управляемыми колесами (см. рис. 1.16).
При этом водитель непосредственно поворачивает колеса первой оси, колеса прочих осей связаны с первой осью с помощью механических, гидравлических или электрогидрав лических передач, которые управляют их поворотом. Управляемые колеса полуприцепов мо гут поворачиваться в зависимости от угла складывания между автомобилем-тягачом и полу прицепом или двумя частями сочлененных автобусов.
В ряде случаев для упрощения конструкции рулевого управления задние поворотные колеса многоосных автомобилей и прицепов делаются самоустанавливающимися, т. е. ко леса на повороте сами поворачиваются на углы, при которых на них не воздействуют бо ковые силы (рис. 5.2).
Силовой способ поворота автомобиля аналогичен способу поворотов гусенич ных машин. При этом способе функции рулевого управления выполняет специальная трансмиссия. При воздействии водителя на органы управления трансмиссия подтор маживает колеса одного борта с подачей тяговых сил на колеса другого, что вызывает появление момента сил правого и левого борта, который стремится повернуть машину относительно вертикальной оси. Такая схема управления обеспечивает поворот практи чески на месте. Но силовой способ управления на современных автомобилях почти не применяется, что связано с низкой точностью управления на больших скоростях, высо ким износом шин, необходимостью устанавливать двигатели повышенной мощности и сложные трансмиссии.
Вместе с тем силовой способ управления поворотом все же применяется в современных автомобилях, но не в качестве основного, а как основа функционирования электронной си стемы стабилизации траектории ESP (см. §31).
§30
Дата добавления: 2016-09-06; просмотров: 4719;
Поиск по сайту
Узнать еще
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.
- I. Способы представления переменного синусоидального тока и напряжения.
- IV. Термодатчики, их устройство и назначение.
- MS Word. Выделение текста. Понятие фрагмента текста. Способы форматирования фрагментов, работа с фрагментами (копирование, удаление, перемещение).
- V. СПОСОБЫ ПОЛУЧЕНИЯ И ХИМИЧЕСКИЕ СВОЙСТВА АЦЕТИЛЕНОВЫХ И ДИЕНОВЫХ УГЛЕВОДОРОДОВ
- VII. Риски и способы их минимизации
- Yandex_direct_print() Теплоизоляция - требования, способы крепления
- А) Назначение и порядок выполнения расчетов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
