Сложение вращений твёрдого тела.
В этом параграфе будут рассмотрены движение тела относительно параллельных, пересекающихся осей.
1. Сложение вращений относительно параллельных осей.

|

|

|

|

|
| X |
| Y |
| Z |

|

|

|

|

|
| Рис.44 |
| М |
 по отношению к системе координат
по отношению к системе координат  в свою очередь вращающейся вокруг оси Oz неподвижной (абсолютной) системы координат Oxyz; вектор угловой скорости вращения тела вокруг оси ', направленный вдоль этой оси, обозначим
в свою очередь вращающейся вокруг оси Oz неподвижной (абсолютной) системы координат Oxyz; вектор угловой скорости вращения тела вокруг оси ', направленный вдоль этой оси, обозначим  и назовем относительной угловой скоростью. Вращение самой системы координат по отношению к системе Oxyz будет переносным движением; вектор угловой скорости этого вращения, направленный по оси Oz, обозначим
и назовем относительной угловой скоростью. Вращение самой системы координат по отношению к системе Oxyz будет переносным движением; вектор угловой скорости этого вращения, направленный по оси Oz, обозначим  и назовем переносной угловой скоростью. Заметим прежде всего, что из условия параллельности векторов и все точки тела как в относительном, так и в переносном движении остаются в плоскостях, перпендикулярных к этим векторам, следовательно, абсолютное движение тела будет плоским. Точка М этой плоской фигуры, имеющая вектор-радиус
и назовем переносной угловой скоростью. Заметим прежде всего, что из условия параллельности векторов и все точки тела как в относительном, так и в переносном движении остаются в плоскостях, перпендикулярных к этим векторам, следовательно, абсолютное движение тела будет плоским. Точка М этой плоской фигуры, имеющая вектор-радиус  по отношению к О' и вектор-радиус
по отношению к О' и вектор-радиус  по отношению к О, будет двигаться с абсолютной скоростью
по отношению к О, будет двигаться с абсолютной скоростью  , равной
, равной

или  (2.41)
(2.41)
С другой стороны, рассматриваемое плоское движение можно представить как мгновенное вращение около оси, проходящей через мгновенный центр и перпендикулярной к плоскости движения. Чтобы найти положение этой оси, обозначим вектор-радиус мгновенного центра Р через  и напишем условие, что абсолютная скорость точки плоской фигуры Р равна нулю. Полагая в равенстве (2.41)
и напишем условие, что абсолютная скорость точки плоской фигуры Р равна нулю. Полагая в равенстве (2.41)  и
и  получим
получим
 (2.42)
(2.42)
|
| Рис.45. |
Умножим обе части этого равенства векторно на единичный вектор  оси Oz; тогда, раскрывая двойное векторное произведение и так как вектора
оси Oz; тогда, раскрывая двойное векторное произведение и так как вектора  и
и  перепендикулярны единичному вектору , получим:
перепендикулярны единичному вектору , получим:  , где
, где  и
и  согласно принятым обозначениям представляют алгебраические величины угловых скоростей (знак плюс, если вращение положительно для наблюдателя, смотрящего с оси Oz или знак минус в противоположном случае). Итак, при
согласно принятым обозначениям представляют алгебраические величины угловых скоростей (знак плюс, если вращение положительно для наблюдателя, смотрящего с оси Oz или знак минус в противоположном случае). Итак, при 
 (2.43)
(2.43)
Из последнего равенства видно, что при любых зависимостях между и мгновенный центр Р находится на линии 00' .Чтобы найти угловую скорость вращения вокруг мгновенного центра, вычтем (2.42) из (2.41); получим:

Это — формула вращательной скорости вокруг точки Р, с абсолютной угловой скоростью, равной
 Итак, рассматриваемое абсолютное движение твердого тела эквивалентно вращению вокруг мгновенной оси, проходящей через мгновенный центр Р, с абсолютной угловой скоростью, равной геометрической сумме переносной и относительной угловых скоростей. Отметим возможные случаи расположения мгновенной оси.
Итак, рассматриваемое абсолютное движение твердого тела эквивалентно вращению вокруг мгновенной оси, проходящей через мгновенный центр Р, с абсолютной угловой скоростью, равной геометрической сумме переносной и относительной угловых скоростей. Отметим возможные случаи расположения мгновенной оси.
1. Направление вращений одинаково, т. е. и имеют один и тот
|
| Рис.46. |
же знак, например положительный. В этом случае из уравнений (2.43) видно, что точка лежит между центрами О и  на расстояниях, обратно пропорциональных величинам угловых скоростей (рис 46). Абсолютная угловая скорость вращения вокруг оси, проходящей через точку Р, по (63) равна сумме угловых скоростей.
на расстояниях, обратно пропорциональных величинам угловых скоростей (рис 46). Абсолютная угловая скорость вращения вокруг оси, проходящей через точку Р, по (63) равна сумме угловых скоростей.
2. Направление вращений различно, т. е. и имеют различные знаки, например > 0, a < 0, причем положим для определенности, что > . В этом случае из формулы (62) следует:  .Точка Р, следовательно, лежит за точкой О.
.Точка Р, следовательно, лежит за точкой О.
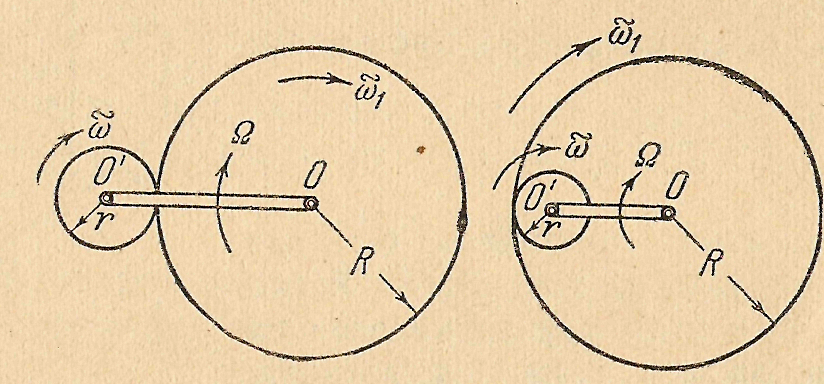
В качестве приложения рассмотрим вопрос об определении угловых скоростей в эпициклическом зацеплении зубчатых колес (рис.47).Обычно эпициклическим или планетарным механизмом называют сцепление двух или нескольких колес, из которых одно вращается около неподвижной оси, другие — около осей, закрепленных на подвижной рукоятке, причем зацепление может быть как внешним, так и внутренним. Колеса, соединенные с вращающейся рукояткой, называют сателлитами.
|
| Рис. 47. |
Выведем общее соотношение между угловыми скоростями колес и рукоятки по отношению к основанию механизма в случаях внешнего и внутреннего зацепления. На рисунке все угловые скорости показаны в направлении по часовой стрелке; знак в дальнейшем покажет истинное направление вращений. Угловая скорость рукоятки обозначена через  .Придадим механизму в целом вращение с угловой скоростью (-
.Придадим механизму в целом вращение с угловой скоростью (-  ), равной по величине угловой скорости рукоятки, но противоположной ей по направлению. Тогда по теореме о сложении угловых скоростей основание механизма станет подвижным звеном, имеющим угловую скорость (-
), равной по величине угловой скорости рукоятки, но противоположной ей по направлению. Тогда по теореме о сложении угловых скоростей основание механизма станет подвижным звеном, имеющим угловую скорость (-  ), а рукоятка, наоборот, станет неподвижной и будет играть роль основания механизма. Механизм с перемещающимися осями превратится при этом в систему зубчатых колес с неподвижными осями, но угловые скорости колес будут уже равны соответственно
), а рукоятка, наоборот, станет неподвижной и будет играть роль основания механизма. Механизм с перемещающимися осями превратится при этом в систему зубчатых колес с неподвижными осями, но угловые скорости колес будут уже равны соответственно  и
и  . Тогда, пользуясь известным соотношением между угловыми скоростями и радиусами, найдем:
. Тогда, пользуясь известным соотношением между угловыми скоростями и радиусами, найдем:
 здесь знак "-“ для внешнего зацепления и “+“ для внутреннего.
здесь знак "-“ для внешнего зацепления и “+“ для внутреннего.
3. Направления вращений различны, но угловые скорости их равны по величине (  =-
=-  ).Этот случай представляет некоторую особенность, так как векторы
).Этот случай представляет некоторую особенность, так как векторы  и
и  образуют пару векторов. В этом случае имеет место мгновенно-поступательное движение тела.
образуют пару векторов. В этом случае имеет место мгновенно-поступательное движение тела.
Объединяя все три случая, приходим к следующему результату: при сложении вращений вокруг параллельных осей угловые скорости складываются так же, как параллельные силы в статике. При проведении этой аналогии переносная и относительная угловые скорости рассматриваются как слагаемые силы, а абсолютная угловая скорость соответствует равнодействующей силе.
2. Теорема о сложении вращений вокруг пересекающихся осей.
|
| Рис.48. |
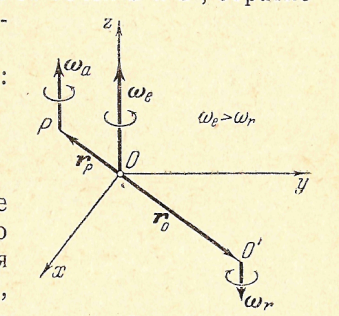
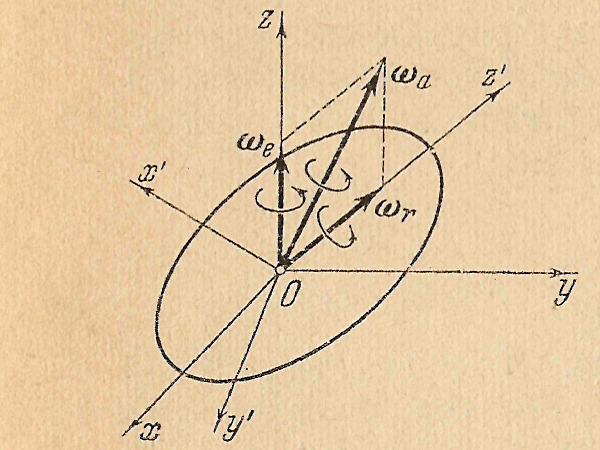
Пусть относительное вращение тела с относительной угловой скоростью  происходит вокруг оси Oz' , а переносным движением является вращение системы Ox'y'z' с переносной угловой скоростью
происходит вокруг оси Oz' , а переносным движением является вращение системы Ox'y'z' с переносной угловой скоростью  вокруг неподвижной оси Oz, пересекающейся с осью Oz' в точке О. Абсолютным движением будет движение тела по отношению к системе координат Oxyz. Рассматриваемое абсолютное движение тела является вращением вокруг неподвижного центра О. Всякое вращение тела вокруг неподвижного центра можно представить как вращение вокруг некоторой мгновенной оси. Определим направление мгновенной оси и найдем вектор абсолютной угловой скорости вращения тела. Для этого возьмем какую-нибудь точку М тела с вектор-радиусом
вокруг неподвижной оси Oz, пересекающейся с осью Oz' в точке О. Абсолютным движением будет движение тела по отношению к системе координат Oxyz. Рассматриваемое абсолютное движение тела является вращением вокруг неподвижного центра О. Всякое вращение тела вокруг неподвижного центра можно представить как вращение вокруг некоторой мгновенной оси. Определим направление мгновенной оси и найдем вектор абсолютной угловой скорости вращения тела. Для этого возьмем какую-нибудь точку М тела с вектор-радиусом  и напишем по теореме о сложении скоростей: в данном случае
и напишем по теореме о сложении скоростей: в данном случае

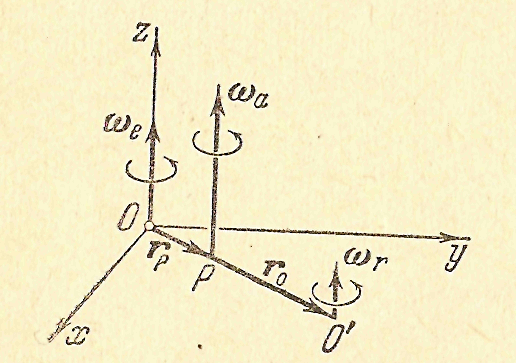
откуда следует, что  т.е. абсолютная угловая скорость при вращении тела относительно пересекающихся осей равна геометрической сумме относительной и переносной угловых скоростей. В качестве иллюстрации рассмотрим случай регулярной прецессии твёрдого тела, когда
т.е. абсолютная угловая скорость при вращении тела относительно пересекающихся осей равна геометрической сумме относительной и переносной угловых скоростей. В качестве иллюстрации рассмотрим случай регулярной прецессии твёрдого тела, когда
 ,
,  и
и 

|

|

|

|

|

|
| Рис 49 |
| О |
 Тогда угловое ускорение тела будет равно (по формуле 2.25)
Тогда угловое ускорение тела будет равно (по формуле 2.25)
 ,
,
и  . При решении этой задачи методом сложения вращений надо рассмотреть отдельно два вращения тела относительно двух неподвижных осей. Первое вращение – это « стоп переносное движение -
. При решении этой задачи методом сложения вращений надо рассмотреть отдельно два вращения тела относительно двух неподвижных осей. Первое вращение – это « стоп переносное движение -  =0» и рассматривается задача о вращении тела относительно подвижной оси по закону
=0» и рассматривается задача о вращении тела относительно подвижной оси по закону  , тогда:
, тогда:
 .
.
В нашем случае последнее слагаемое равно нулю,  - кратчайшее расстояние от точки до оси относительного вращения.
- кратчайшее расстояние от точки до оси относительного вращения.
Второе вращение – это « стоп относительное движение -  =0» и рассматривается задача о вращении тела относительно неподвижной оси по закону
=0» и рассматривается задача о вращении тела относительно неподвижной оси по закону  . Будем иметь:
. Будем иметь:
И в этом случае последнее слагаемое равно нулю,  - кратчайшее расстояние от точки до оси переносного вращения. Третья составляющая ускорения – ускорение Кориолиса, равное
- кратчайшее расстояние от точки до оси переносного вращения. Третья составляющая ускорения – ускорение Кориолиса, равное
 .
.
Величина этого ускорения равна  . Чтобы получить величину абсолютного ускорения, необходимо выбрать оси координат и спроектировать все ускорения на выбранные оси. Получив
. Чтобы получить величину абсолютного ускорения, необходимо выбрать оси координат и спроектировать все ускорения на выбранные оси. Получив  , получим
, получим  .
.
Дата добавления: 2016-08-06; просмотров: 2458;
Поиск по сайту
Узнать еще
- III. 4 МЕХАНИКА ТВЁРДОГО ТЕЛА
- А – трехгранный; б – в форме ложечки; в – плоский с заменяемой пластиной из твердого сплава
- Алгебраическое сложение чисел, представленных в форме с плавающей запятой
- Алгебраическое сложение чисел, представленных в форме с фиксированной запятой
- Аморфные и кристаллические тела.
- Аморфные и кристаллические тела. Анизотропия кристаллов. Классификация кристаллов по типу связей. Дефекты в кристаллах. Жидкие кристаллы.
- Антитела. Функции антител. Структура антител. Виды антител
- Аэрозолем называется микрогетерогенная система, в которой частички твердого вещества или капельки жидкости взвешены в газе. Условное обозначение аэрозолей: Т/Г или Ж/Г.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
