Исполнительные устройства с двигателями переменного тока.
В автоматических системах регулирования в качестве исполнительных устройств широко применяются двухфазные асинхронные двигатели переменного тока.
Двухфазные асинхронные двигатели по конструктивному исполнению подвижной части подразделяются на двигатели с_короткозамкнутым ротором, с полым немагнитным ротором и с полым ферромагнитным ротором.
У двигателей первого типа ротор выполнен в виде «беличьей клетки», образованной несколькими продольными проводниками, замкнутыми накоротко в торцевой части поперечными кольцами.
У двигателей второго типа ротор выполняется в виде тонкостенного полого стакана. Применение полого ротора существенно уменьшает инерционность двигателя и момент трения на валу.
У двигателей третьего типа полый ротор выполняется из ферромагнитного материала, поэтому инерционность двигателя повышается.
В качестве примера на рис.83а приведена конструкция электродвигателя с полым немагнитным ротором.
1 - внутренний статор,
2 – ротор из немагнитного материала,
3 – внешний статор,
4 – обмотка статора,
5 – вал двигателя.
В двухфазных асинхронных электродвигателях часто статор с обмотками располагают внутри ротора двигателя. В пазы внешнего статора 3 закладываются две обмотки 4 таким образом, чтобы магнитные оси их были взаимно перпендикулярны (рис.82б). Одна из обмоток статора является возбуждающей ОВ и подключается к источнику питания переменного тока с напряжением постоянной амплитуды UВ. Вторая обмотка является управляющей ОУ и обычно питается напряжением переменного тока Uу той же частоты, что и возбуждающая обмотка 0В, но сдвинутым по фазе относительно напряжения Uв на 90°.
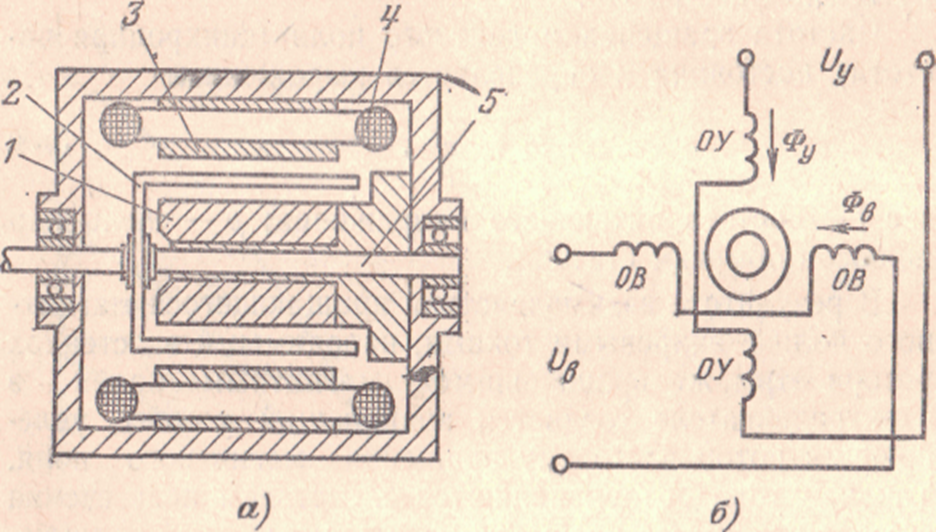
| Рис. 82. Двухфазный асинхронный двигатель переменного тока с полым немагнитным ротором; а – конструкция; б – схема соединения обмоток. |
Принцип действия двухфазного асинхронного двигателя основан на явлении вращающегося магнитного поля, которое возникает при подаче на обмотки статора ОВ и ОУ напряжений постоянной амплитуды, но сдвинутых по фазе на 90°.
Частота вращения магнитного поля (синхронная частота) постоянна и определяется выражением: n=60×f/р
где f - частота питающего напряжения; р - число пар полюсов обмотки статора.
В результате взаимодействия вращающегося магнитного поля с вихревыми токами, наводимыми в стенках ротора этим же вращающимся магнитным полем, в электродвигателе создается вращающий момент, увлекающий ротор в сторону вращения магнитного поля. Во время холостого хода двигателя, когда его вращающий момент преодолевает лишь незначительный тормозящий момент от механических потерь на трение в подшипниках и ротора о воздух, ротор вращается почти синхронно с вращающимся полем и токи в стенках ротора незначительны. Электромагнитный вращающий момент асинхронного двигателя может создаваться только при условии, когда ротор его вращается несколько медленнее вращающегося поля. При этом вращение ротора тем медленнее, чем больше механическая нагрузка на валу двигателя.
Управление двухфазными асинхронными двигателями осуществляется двумя способами: изменением напряжения на обмотке управления UУ или изменением угла сдвига фаз между напряжениями возбуждения UВ и управления UУ. Первый способ регулирования частоты вращения называется амплитудным, второй — фазовым. Применяемые в системах автоматики двухфазные асинхронные двигатели управляются в подавляющем большинстве случаев первым способом.
В заключение следует отметить, что существенным недостатком двухфазных асинхронных двигателей является низкий КПД, который лежит в пределах от 15 до 30%. По этой причине мощность таких двигателей не превышает 10 - 20 Вт.
Дата добавления: 2020-11-18; просмотров: 954;
Поиск по сайту
Узнать еще
- II. ПЕРЕФЕРИЙНЫЕ УСТРОЙСТВА
- IV УСТРОЙСТВА ФИЛЬТРАЦИИ СИГНАЛОВ
- Аварии на объектах обустройства
- Автоматизированные загрузочные устройства – важнейшая часть механообрабатывающей системы. Классификация устройств загрузки . Питатели.
- Автоматизированный комплекс технической диагностики ЭЛЕКТРОПОЕЗДОВ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКОВ
- Автоматические устройства управления и регулировок приемника
- АКТИВНОЕ СОПРОТИВЛЕНИЕ В ЦЕПИ ПЕРЕМЕННОГО ТОКА
- Анализ электрических цепей переменного тока производится, комплексным методом.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
