Синхронные шаговые электродвигатели.
Работа синхронного шагового электродвигателя состоит в том, чтобы при подаче на него одного электрического импульса его зубчатый ротор поворачивался на дозированную величину, как правило, на один зубец (рис.83).
Конструктивно подвижный ротор и неподвижный статор шагового электродвигателя обычно состоят из трех (по числу фаз управляющего напряжения) секций, набранных из трансформаторного железа. Секции ротора жестко закреплены на валу шагового электродвигателя, а секции статора жестко закреплены на неподвижной части этого вала шагового электродвигателя. И ротор, и статор шагового электродвигателя изготовлены с одинаковыми прямоугольными выступами, называемыми зубцами. Шаг зубцов на роторе и на статоре одинаков. Но зубцы всех трех секций статора относительно оси вращения расположены одинаково, а зубцы второй секции ротора смещены относительно первой секции ротора на 1/3 шага, и зубцы третьей секции ротора смещены относительно первой секции ротора на 2/3 шага. На каждой из секций обмоток статора размещают управляющие обмотки с числом полюсов Р.
При подаче импульса напряжения Х на обмотку одной из секций статора ротор шагового электродвигателя поворачивается на такой угол ∆φ, чтобы минимизировать магнитное сопротивление воздушного зазора между выступами статора и соответствующей секции ротора (рис.83). В соответствии с этим, зубцы данной секции ротора, если не принимать специальных мер, устанавливаются прямо против зубцов соответствующей секции статора,
т. е. угол ∆φ градусов, на который поворачивается ротор, определяется соотношением
| Рис. 83. Схема поворота ротора синхронного шагового электродвигателя. |
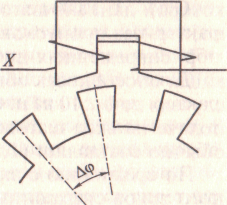 ∆φ=360/N,где N – число зубцов ротора
∆φ=360/N,где N – число зубцов ротора
Подача импульса на обмотку следующей секции статора вызывает поворот ротора шагового электродвигателя еще на угол ∆φ и так далее. Последовательность подачи импульсов прямоугольного напряжения на обмотки секций статора определяется соответствующей электронной коммутирующей схемой. Скорость вращения ротора шагового электродвигателя однозначно определяется частотой подачи на обмотки его статора прямоугольных импульсов напряжения. Поэтому такие шаговые электродвигатели являются синхронными.
Применение их оказывается целесообразным, когда требуется стартстопное вращение с точным позиционированием и (или) с заданной скоростью вращения вала. Общий угол поворота ротора однозначно определяется суммарным числом импульсов, поданных на вход данного шагового электродвигателя.
Приемистостью, или разрешающей способностью, шагового электродвигателя называется та предельная частота поступающих на его вход сигналов, начиная с которой данный шаговый электродвигатель перестает их надежно, т.е. без пропусков, отрабатывать.
У современных двигателей такого типа предельная разрешающая способность обычно составляет 2 кГц, доходя в некоторых случаях до 8... 10 кГц. Соответствующий угол поворота ротора при подаче на вход шагового электродвигателя единичного импульса обычно составляет (1,5 ± 0,5)°.
По сравнению с электродвигателями постоянного и переменного токов синхронный шаговый электродвигатель характеризуется более высокой безотказностью, более высокой устойчивостью к внешним помехам, а также, меньшими габаритными размерами.
В последнее время появились шаговые электродвигатели, способные развивать значительную мощность. Появились также двигатели такого типа, у которых зубчатые статор и ротор развернуты по оси или плоскости (по двум осям), так что подобные шаговые электродвигатели способны непосредственно осуществлять линейные перемещения вдоль этой оси или по этой плоскости.
Дата добавления: 2020-11-18; просмотров: 495;
Поиск по сайту
Узнать еще
- Асинхронные двигатели
- Асинхронные двигатели. Конструкция, принцип действия
- Асинхронные исполнительные двигатели
- АСИНХРОННЫЕ ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ
- Асинхронные счетчики
- Асинхронные электродвигатели взрывозащищенного исполнения серии ВАОВ
- Асинхронные электродвигатели с фазным ротором в крановых электроприводах
- Асинхронные электродвигатель серии N 560 Y2 мощностью 2500 кВт

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
