Система автоматического слежения по направлению(АСН).
Изменение угловых координат движущихся объектов осуществляется системой автоматического сопровождения по направлению (АСН).
Направление на объект определяется двумя угловыми координатами: азимутом (угол в горизонтальной плоскости) и углом места (угол в вертикальной плоскости). Если с неподвижным основанием антенны совместить систему координат, то угловое положение антенны относительно этого основания определит азимут объекта в горизонтальной плоскости и угол места объекта в вертикальной. Для обеспечения поворота антенны в двух плоскостях оси двигателей азимутальной и угломестной следящих систем соединены с антенной посредством карданного повеса.
Система АСН состоит из приемопередающего устройства, направленной антенны и двухканального следящего привода этой антенны, посредством которого осуществляется поворот антенны в двух плоскостях – азимутальной (горизонтальной) и угломестной (вертикальной).
Таким образом, система АСН состоит из двух следящих систем, в каждой из которых входной величиной является угловая координата (азимут или угол места) движущегося объекта, а выходной величиной – угол, определяющий положение равносигнального направления (РСН) в азимутальной или угломестной плоскости.
В АСН применяют антенны направленного действия (параболические зеркальные или антенные решетки). Антенная система АСН совместно с приемопередающим устройством образует угловой дискриминатор (УД). Пеленгационная характеристика АСН в каждом канале формируется обычно из двух диаграмм направленности (ДН), смещенных относительно РСН на некоторый угол (рис. 3.21а).
На рис. 3.21б показано, как из исходных ДН f1(q) и f2(q) получаются суммарная f+(q) и разностная f–(q) ДН. Из графика f–(q) видно, что разностная ДН напоминает дискриминационную характеристику.
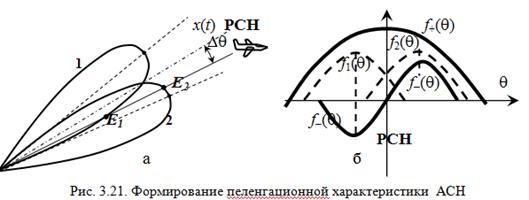
В результате в итоговой ДН сформировано РСН, обладающее тем свойством, что при совпадении его с направлением на объект ошибка на выходе УД будет равна нулю. При смещении объекта относительно РСН (Dq) возникает угловое рассогласование x(t), и на выходе УД появляется напряжение ошибки Uд(t), пропорциональное рассогласованию:
Uд(t) = kУД x(t) = kУД Dq , (3.21)
где kУД – коэффициент преобразования УД, а Dq – угловое смещение объекта наблюдения (например, в канале угла места) относительно РСН.
На рис. 3.22 приведена функциональная схема одного из каналов АСН, состоящая из УД, усилителя (У) и исполнительного двигателя (ИД) с редуктором (Р), управляющими положением антенны (А).
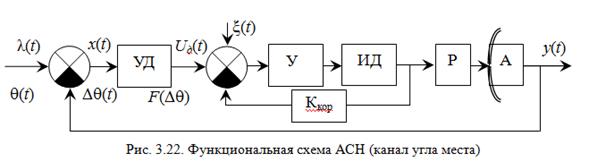
Для получения необходимых динамических характеристик следящей системы в ее состав введено корректирующее устройство Ккор , которое состоит из тахометрического моста, вырабатывающего напряжение, пропорциональное скорости вращения ротора ИД, дифференцирующей цепи и представляет собой цепь гибкой обратной связи (связи по ускорению), охватывающей У и ИД следящей системы.
Возникающее в результате движения объекта рассогласование x(t) (или Dq) преобразуется УД в напряжение ошибки Uд(t), которое поступает на вход усилителя (У) следящей системы. Под действием этого напряжения ротор двигателя (ИД) начинает вращаться, поворачивая через редуктор (Р) антенну (А) в соответствующей плоскости в сторону уменьшения рассогласования.
ИД с редуктором совместно со следящей антенной представляют собой неизменяемую часть системы АСН с заданными динамическими характеристиками, поэтому в качестве объекта управления системы АСН в динамическом отношении целесообразно рассматривать не саму антенну, а антенну и ИД с редуктором как единое целое. При этом динамические свойства антенны (момент инерции относительно выходной оси следящей системы и т. п.) учитывают при расчете постоянной времени ИД.
В зависимости от способа формирования РСН УД системы АСН подразделяют на две группы: УД с последовательным сравнением сигналов (УД с интегральным РСН) и УД с одновременным сравнением сигналов (УД с мгновенным РСН).
В УД первого типа антенной АСН формируется одна вращающаяся ДН, максимум которой смещен от продольной оси антенны (сечение этой ДН совпадает с ДН на рис. 3.21а). Если направление на цель совпадает с РСН, то цель облучается импульсами одной и той же мощности, поэтому амплитуда отраженных от нее импульсов будет постоянной. Если же движущийся объект смещается от РСН, то в моменты времени, разделенные интервалом времени, равным половине периода сканирования, отраженные от цели импульсы будут иметь различные амплитуды. В итоге на выходах фазовых детекторов выделяется напряжение разности отраженных от цели импульсов. Анализ амплитуды и фазы полученного сигнала позволяет определить рассогласование с РСН и выполнить подстройку положения антенны в соответствующих каналах.
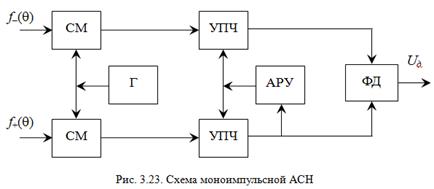
В моноимпульсных УД прием отраженных от цели сигналов осуществляется одновременно четырьмя антеннами (по две для пеленгации цели в каждой плоскости), и для каждой плоскости формируется свой независимый канал. В отличие от предыдущего типа УД, амплитудные флуктуации отраженного сигнала не влияют на точность измерения угла рассогласования. Упрощенная схема УД моноимпульсной АСН представлена на рис. 3.23.
Сформированные суммарная f+(q) и разностная f–(q) ДН поступают на соответствующие входы смесителей СМ, после фильтрации и усиления в УПЧ полученные сигналы сравниваются фазовым детектором (ФД).
Uд(Dq)= k0 F(q) = k0 f–(q)/f+(q) = kУДk0Dq . (3.22)
 Суммарная ДН позволяет нормировать пеленгационную характеристику при разных уровнях сигнала от целей и может быть использована в петле АРУ. Кроме того, для АРУ можно использовать информацию об изменении дальности цели от системы АСД.
Суммарная ДН позволяет нормировать пеленгационную характеристику при разных уровнях сигнала от целей и может быть использована в петле АРУ. Кроме того, для АРУ можно использовать информацию об изменении дальности цели от системы АСД.
Еще одна реализация АСН может быть построена на основе системы антенн, разнесенных в пространстве (разнесенный прием). В этом случае при отклонении цели от РСН будут различаться фазовые набеги в каналах приема, что используется для дальнейшей обработки и подстройки положения ДН антенн аналогично системам, рассмотренным выше (рис. 3.24).
Дата добавления: 2020-10-25; просмотров: 940;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- DSM — система классификации Американской психиатрической ассоциации
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.
- Єдина державна система цивільної оборони населення та територій
- Ідеальна центрована оптична система
- Інформаційна система спостереження та аналізу стану природи.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
