Типы АРУ с обратным регулированием.
АРУ с обратным регулированием получили наибольшее распространение, но кроме простой обратной АРУ, рассмотренной ранее, на практике используются разновидности обратной АРУ: АРУ с задержкой и АРУ с задержкой и усилением.
В общем случае в систему АРУ входят: регулируемые элементы, амплитудный детектор, фильтры и дополнительные усилители.
Схема простой обратной АРУ включает в себя амплитудный детектор с ФНЧ (обычно первого порядка, например, RС–цепь) и РУ. При увеличении уровня Uвх увеличивается Uвых РУ, поэтому величина Up также увеличивается. ФНЧ выделяет постоянную составляющую Up при детектировании Uвых РУ, которая поступает на управляющий вход РУ, смещая рабочую точку и изменяя крутизну входного каскада РУ, в результате изменяется КУ РУ и осуществляется регулирование. Чем больше уровень Uвх, тем меньше КУ РУ.
При большой постоянной времени ФНЧ ТФ напряжение на его выходе не успевает отслеживать изменения амплитуды усиливаемого сигнала, вызванные изменением условий распространения радиоволн (например, при связи с подвижными объектами), поэтому ТФ следует ограничить сверху. Выбирают постоянную времени ТФ так, чтобы она была меньше минимального периода замираний входного сигнала ТЗmin, который обычно намного превышает максимальный период полезной (амплитудной) модуляции сигнала ТАМтaх. Оптимальное значение ТФ выбирают значительно больше ТАМтaх усиливаемого сигнала :
 , (3.13)
, (3.13)
где fМmin – минимальная частота модуляции сигнала.
 На рис. 3.11 график 2 соответствует амплитудной характеристике РУ с простой обратной АРУ. Для сравнения на этом же рисунке график 1 показывает амплитудную характеристику усилителя без АРУ, у которого наблюдается почти линейная зависимость при Uвх < Uвх н1, но при значениях Uвх > Uвх н1 наступает перегрузка (насыщение) усилителя, которая приводит к искажениям сигнала.
На рис. 3.11 график 2 соответствует амплитудной характеристике РУ с простой обратной АРУ. Для сравнения на этом же рисунке график 1 показывает амплитудную характеристику усилителя без АРУ, у которого наблюдается почти линейная зависимость при Uвх < Uвх н1, но при значениях Uвх > Uвх н1 наступает перегрузка (насыщение) усилителя, которая приводит к искажениям сигнала.
В простой обратной АРУ с ростом Uвх КУ РУ уменьшается, поэтому перегрузка не возникает (при Uвх > Uвх н1).
Недостатком простой АРУ является то, что регулировка в ней действует, начиная с самых слабых сигналов. В результате КУ РУ снижается не только для сильных сигналов, которые могут привести к перегрузке РУ, но и для самых слабых сигналов, для приема которых было бы необходимо использовать полное усиление.
Для компенсации этого недостатка и используется АРУ с задержкой(рис. 3.11 график 3), в которой петля регулирования АРУ включается только при превышении некоторого порогового значения. В итоге в такой АРУ сохраняется большой КУ при усилении слабых сигналов.
Для приближения к идеальной амплитудной характеристике в АРУ с задержкой необходимо увеличивать КУ петли регулирования. Для этого в петлю регулирования АРУ включается дополнительный усилитель, который подключается обычно после детектора и ФНЧ. Такая система называется АРУ с задержкой и усилением.
Режим работы дополнительного усилителя выбирается так, чтобы при отсутствии входного сигнала он был закрыт. При превышении порогового значения, как и в АРУ с задержкой, напряжение на выходе ФНЧ детектора превысит запирающее напряжение дополнительного усилителя, в итоге он включит петлю регулирования и усилит напряжение Uр, которое поступит на управляющий вход РУ.
Такие системы АРУ с задержкой и усилением отличаются большой эффективностью регулировки, так как при относительно небольшом изменении напряжения на входе детектора регулирующее напряжение изменяется в больших пределах.
Основные характеристики АРУ.Кроме амплитудной характеристики (Uвых = f(Uвх)), для описания АРУ часто используются такие характеристики: коэффициент регулирования, ПФ петли регулирования АРУ, регулировочная характеристика АРУ, время установления Uвых .
Коэффициент регулирования Крег равен отношению динамического диапазона Dвх (Dвх = Uвх max / Uвх min) изменений уровня входного сигнала к допустимому динамическому диапазону Dвых (Dвых = Uвых max / Uвых min) изменений уровня выходного сигнала:
 . (3.14)
. (3.14)
Регулировочная характеристика – зависимость КУ РУ от величины регулирующего напряжения Up: К = f(Up).
 Примерный вид этой характеристики (K в дБ) изображен сплошной линией на рис. 3.12.
Примерный вид этой характеристики (K в дБ) изображен сплошной линией на рис. 3.12.
Очевидно, что КУ максимален при отсутствии Up, (K = Kmax при Up = 0).
По регулировочной характеристике можно определить величину Up max, при которой. К = Кmin.
Регулирующее напряжение Up АРУ определяется уровнем Uвых (или Uвх) РУ.
ПФ петли регулирования АРУ – зависимость Up = f(Uвх) для прямой АРУ и Up = f(Uвых) дляобратной АРУ.
Эта зависимость для простой АРУ показана на рис. 3.13 (график 1).
При небольших Uвых зависимость Up = f(Uвых)близка к линейной.
График 2 на рис. 3.13 показывает ПФ петли регулирования обратной АРУ с задержкой.
С помощью линейной аппроксимации графиков на рис. 3.13 можно определить КУ петли регулирования АРУ – КАРУ :

 . (3.15)
. (3.15)
Из выражения (3.15) следует, что невозможно получить обратную АРУ, имеющую идеальную амплитудную характеристику (с постоянной амплитудой Uвых), так как при этом необходимо, чтобы КАРУ ®¥.
Время установления Uвых (Tу) – интервал времени от момента включения входного сигнала до момента времени, когда амплитуда выходного напряжения достигает величины 90 % Uвых max.
На рис. 3.14 приведена (в качестве примера) схема обратной АРУ, которая используется в лабораторной работе [6].
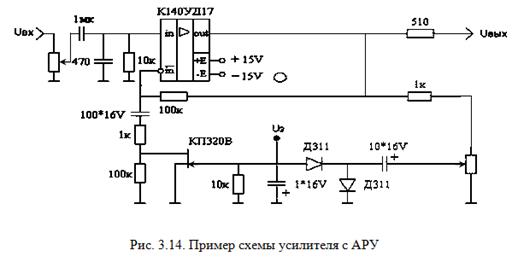
С выхода РУ часть сигнала поступает на диодный детектор, а затем на затвор полевого транзистора. Изменение амплитуды UЗ влияет на сопротивление перехода транзистора, а значит, на напряжение на инвертирующем входе РУ. В результате осуществляется автоматическое изменение коэффициента усиления РУ.
19. система автоматического слежения по дальности:
Дальномер РЛС (система автоматического слежения (сопровождения) по дальности – АСД) предназначен для измерения дальности выбранной цели, информация о которой используется в устройствах систем наведения летательных аппаратов, навигационных комплексах и т. п.
Принцип работы дальномера базируется на измерении сдвига между зондирующими импульсами, следующими через период времени Т, и импульсами, отраженными от цели. Отраженные от цели импульсы искажены шумами, поэтому непосредственное измерение дальности по времени задержки связано с большими ошибками. Для повышения точности измерения в АСД формируются следящие импульсы, временное положение которых относительно зондирующих импульсов оказывается пропорциональным дальности до цели и незначительно зависит от шумов.
На рис. 3.18 приведена упрощенная функциональная схема дальномера (АСД) импульсной РЛС.
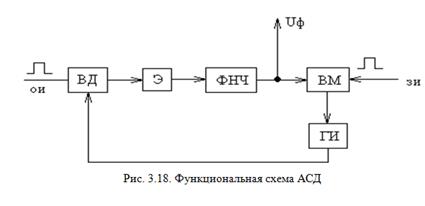
При измерении дальности отраженный от цели импульс поступает на временной дискриминатор (ВД), на второй вход которого с генератора импульсов (ГИ) подаются два следящих импульса. Как и в системе слежения за временным положением импульса, рассмотренной выше, ВД вырабатывает напряжение Uд, пропорциональное рассогласованию временного положения отраженного импульса относительно оси симметрии следящих импульсов (Кд – коэффициент преобразования ВД):
 , (3.19)
, (3.19)
где Δt – рассогласование по времени между отраженными и следящими импульсами;  – время задержки отраженного импульса относительно зондирующего; tи – время задержки следящих импульсов; R – измеряемая дальность; с – скорость света.
– время задержки отраженного импульса относительно зондирующего; tи – время задержки следящих импульсов; R – измеряемая дальность; с – скорость света.
На рис. 3.19 приведены эпюры напряжений, поясняющих принцип работы ВД [4].
Если временное рассогласование Δt не равно нулю, то ВД вырабатывает два импульса, длительности которых:
 ,
,  ,
,
где τ – длительность отраженного импульса.
 Импульсы с ВД τ1 и τ2 детектируются, и разность полученных напряжений является выходным напряжением ВД. На каждом периоде измерения дальности напряжение с выхода ВД фиксируется экстраполятором (Э) и сбрасывается до нуля приходом следующей пары следящих импульсов.
Импульсы с ВД τ1 и τ2 детектируются, и разность полученных напряжений является выходным напряжением ВД. На каждом периоде измерения дальности напряжение с выхода ВД фиксируется экстраполятором (Э) и сбрасывается до нуля приходом следующей пары следящих импульсов.
Напряжение с Э через ФНЧ подается на временной модулятор (ВМ), который зондирующим импульсом, задержанным на время, пропорциональное сигналу с ФНЧ, запускает ГИ, формирующий два следящих импульса.
В итоге образуется замкнутый контур регулирования, в котором рассогласование сводится к минимальному значению, определяющему ошибку измерения дальности. Для повышения точности АСД в ФНЧ включают интегратор, при этом РАС становится астатической, и рассогласование Δt при измерении постоянного значения дальности сводится к нулю, а напряжение на выходе ФНЧ Uф в установившемся режиме работы пропорционально измеряемой дальности:
 , (3.20)
, (3.20)
где KВМ – коэффициент преобразования ВМ.
На рис. 3.20 показана обобщенная схема АСД, в которой ключ характеризует импульсный характер сигнала, а звено с характеристикой F(Δt) соответствует дискриминационной характеристике ВД.

20.Система автоматического слежения за временным положением импульса:
Для выделения импульсного периодического сигнала на фоне помех в импульсных радиолиниях, в радиолокационных приемниках и в других РПрмУ применяются системы слежения за временным положением импульса (временные автоселекторы).
На рис. 3.15 показана упрощенная функциональная схема радиолокационного приемника импульсных некогерентных сигналов с временным автоселектором.
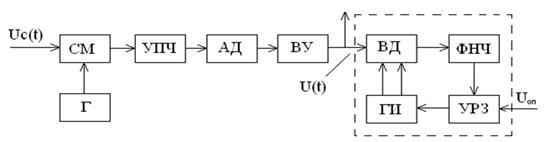 В состав РПрмУ входят смеситель (СМ), гетеродин (Г), усилитель промежуточной частоты (УПЧ), амплитудный детектор (АД), видеоусилитель (ВУ). Напряжение с выхода ВУ поступает на автоселектор для последующей обработки. Элементы схемы, образующие временной автоселектор, обведены на схеме штриховой линией.
В состав РПрмУ входят смеситель (СМ), гетеродин (Г), усилитель промежуточной частоты (УПЧ), амплитудный детектор (АД), видеоусилитель (ВУ). Напряжение с выхода ВУ поступает на автоселектор для последующей обработки. Элементы схемы, образующие временной автоселектор, обведены на схеме штриховой линией.
Для уменьшения действия помех РПрмУ открывается лишь на короткие интервалы времени, определяемые длительностью стробирующих импульсов. Эти импульсы формируются генератором импульсов (ГИ), входящим в состав временного автоселектора.
 ГИ кроме стробирующего импульса формирует два следящих импульса, которые подаются на временной дискриминатор (ВД), на который также поступают импульсы сигнала с выхода видеоусилителя.
ГИ кроме стробирующего импульса формирует два следящих импульса, которые подаются на временной дискриминатор (ВД), на который также поступают импульсы сигнала с выхода видеоусилителя.
Для того, чтобы импульсы сигнала могли пройти через приемное устройство, необходимо совместить с ними во времени стробирующие импульсы. На выходе ВД формируется напряжение, зависящее от рассогласования Δτ между временным положением импульса сигнала (τс) и следящих импульсов (τсл):  (рис. 3.16) [4].
(рис. 3.16) [4].
Выходное напряжение ВД сглаживается ФНЧ и поступает в качестве управляющего на устройство регулируемой линии задержки (УРЗ). В этом устройстве опорный импульс Uоп, поступающий от передатчика РЛС, задерживается на некоторый временной интервал и запускает ГИ, определяя тем самым положение стробирующих следящих импульсов. Управляющее напряжение, снимаемое с выхода ФНЧ, изменяет величину задержки так, что временной сдвиг между сигнальным и следящими импульсами уменьшается.
При изменении временного положения импульсов сигнала, вызванного, например, изменением дальности до цели, происходит соответствующее перемещение следящих импульсов, и в схеме осуществляется автоматическое сопровождение цели по дальности.
Рассмотрим процесс слежения системы за временным положением импульса как непрерывной РАС.
Под положением следящих импульсов понимается положение их общего фронта. За начало отсчета величин τс и τсл примем положение опорного импульса Uоп. При высокой частоте повторения импульсов, пульсации выходного напряжения ВД, обусловленные импульсным характером сигнала, эффективно подавляются ФНЧ. В этом случае при анализе автоселектора достаточно рассматривать Uд(t), усредненное за период повторения импульсов:
 , (3.16)
, (3.16)
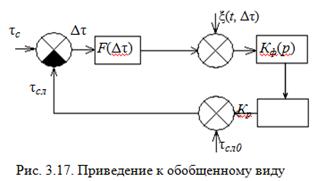
где F(Δτ) – дискриминационная характеристика, а напряжение ξ(t, Δτ) зависит от соотношения сигнал-шум в полосе УПЧ, длительности следящих импульсов, наличия флуктуаций сигнала и т. п.
Преобразование выходного напряжения ВД Uд(t), выполняемое ФНЧ, определяется его ПФ Кф(р). В состав фильтра в автоселекторе обычно включают один-два интегратора.
Напряжение Uф(t) на выходе ФНЧ при этом равно:
 . (3.17)
. (3.17)
Обычно зависимость величины задержки от управляющего напряжения является безынерционной. Кроме того, если она линейна, то выполняется следующее соотношение:
 , (3.18)
, (3.18)
где Kр – крутизна регулировочной характеристики, а τсл0 – значение задержки при отсутствии управляющего напряжения.
На рис. 3.17 приведена схема временного автоселектора, сведенная к обобщенному виду.
Дата добавления: 2020-10-25; просмотров: 842;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- F43 Реакция на тяжелый стресс и нарушения адаптации
- F8 Нарушения психологического развития
- I этап. Наружный осмотр и пальпация
- II.II. Типы геологических карт
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ
- III.1.4. ОСОБЕННОСТИ РАЗВИТИЯ ПОЗНАВАТЕЛЬНОЙ СФЕРЫ У ДЕТЕЙ С НАРУШЕНИЯМИ СЛУХА
- III.2.3. ПРИЧИНЫ НАРУШЕНИЙ ЗРЕНИЯ. КЛАССИФИКАЦИЯ НАРУШЕНИЙ ЗРИТЕЛЬНОЙ ФУНКЦИИ У ДЕТЕЙ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
