Кинематическая цепь
Связанная система звеньев, образующих между собой кинематические пары, называется кинематической цепью.
Кинематические цепи по характеру относительного движения звеньев разделяются на плоские и пространственные.
Кинематическая цепь называется тоской, если точки звеньев описывают траектории, лежащие в параллельных плоскостях. Кинематическая цепь называется пространственной, если точки ее звеньев описывают неплоские
траектории или траектории, лежащие в пересекающихся плоскостях. Наибольшее распространение на практике имеют плоские кинематические цепи.
По виду звеньев, входящих в кинематические цепи, последние разделяются на простые и сложные.
Простой кинематической цепью называется такая цепь, в которой каждое звено участвует в образовании не более двух кинематических пар (рис. 1.3, а).
Сложной кинематической цепью называется цепь, в которой имеется хотя бы одно звено, входящее более чем в две кинематические пары (рис. 1.3, б).
Все кинематические цепи, кроме того, подразделяются на незамкнутые и замкнутые.
Незамкнутыми кинематическими цепями называют такие цепи, в которых имеются звенья, образующие только одну кинематическую пару (см. рис. 1.3, а, б).
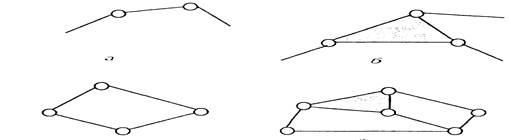
Рис. 1.3
Замкнутыми называются кинематические цепи, в которых каждое звенообразует не менее чем две кинематические пары (рис. 1.3, в, г).
H = 3k – 2p1 – p2 (1.1)
В технике обычно интересует движение звеньев кинематической цепи относительно одного из звеньев, которое является неподвижным и называется стойкой. Если одно звено кинематической цепи сделать неподвижным, то число степеней свободы уменьшится еще на три и относительно неподвижного звена (стойки) будет равно
W = H – 3 = 3(k–1) – 2p1 – p2 (1.2)
где W – число степеней свободы кинематической цени относительно неподвижного звена.
Обозначив к-1= п (количество подвижных звеньев кинематической цепи), окончательно получим выражение для числа степеней свободы кинематической пени относительно неподвижного звена
W = 3n – 2p1 – p2 (1.3)
Число степеней свободы кинематической цепи IV относительно неподвижного звена (стойки) называется степенью подвижности кинематической цепи. Формула (1.3) впервые была получена русским ученым П. Л. Чебышевым и носит его имя. Следует отметить, что эта формула пригодна только для определения степени подвижности плоских кинематических цепей.
Дата добавления: 2020-10-14; просмотров: 743;
Поиск по сайту
Узнать еще
- I. ГЛАВНАЯ ДЫХАТЕЛЬНАЯ ЦЕПЬ
- Буксирный трос; 2 – якорная скоба; 3 – удлиненное звено; 4 – якорная цепь; 5 – скоба; 6 – стальной трос (свистов); 7 – стопора якорной цепи.
- В неориентированном графе понятие дуга, путь, контур заменяются соответственно на ребро, цепь, цикл.
- Введение добавочного активного сопротивления в цепь ротора.
- Включение в цепь r, C к источнику постоянного напряжения.
- ДИФФЕРЕНЦИРУЮЩАЯ RC-ЦЕПЬ
- Дифференцирующая цепь
- Дыхательная электронтранспортная цепь.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
