Кинематическая пара
Структурный анализ механизмов (техническая механика)
Известно, что свободное тело в пространстве обладает шестью степенями свободы и может совершать шесть независимых движении: три поступательных движения вдоль трех осей координат и три вращательных движения вокруг этих осей. Но если это тело образует кинематическую пару с другим телом, то минимум на одно движение у него становится меньше – на движение в направлении обшей нормали к поверхностям звеньев в точке их соприкосновения. На это движение накладывается условие связи. Следовательно. Кинематическая пара может иметь максимум пять степеней свободы. Минимально – одну. Если количество степеней свободы будет равно нулю, то это уже будет не кинематическая пара, а неподвижно соединенные звенья.
Таким образом, количество степеней свободы кинематической пары может принимать значения от одного до пяти. В соответствии с количеством степеней свободы кинематические пары делятся на классы. Класс кинематической пары определяется количеством ее степеней свободы. На рис. 1.1 представлены примеры кинематических пар.
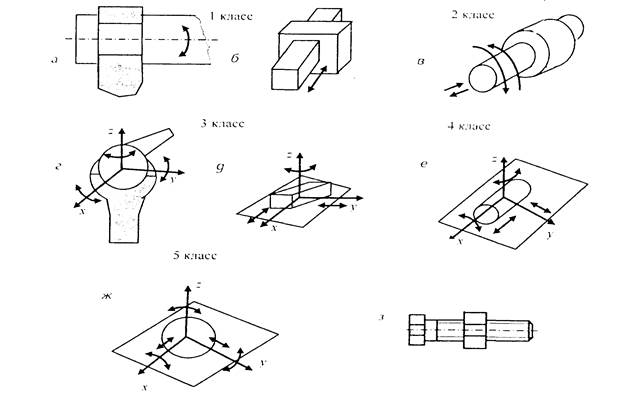
Кинематическими парами 1-го класса могут быть как вращательные (рис. 1.1 а), так и поступательные (рис. 1.1, б) пары. Кинематическая пара типа «цилиндр в цилиндре» (рис. 1.1 в) является парой 2-го класса. Соединение, допускающее три независимых вращательных движения звеньев (сферический шарнир), образует кинематическую пару 3-го класса (рис. 1.1. г). Примером кинематической пары 4-го класса является цилиндр на плоскости (рис. 1.1 е). А пары 5-го класса – шар на плоскости (рис. 1.1 ж).
Кроме указанных кинематических пар имеются пары, относительные движения звеньев которых являются зависимыми. Рассмотрим часто применяемую на практике винтовую кинематические пару винт - гайка (рис. 1.1 З.) Гайка относительно винта совершает два вида движения: вращательное вокруг оси винта и поступательное вдоль оси. Эти движения не являются независимыми, они связаны между собой: величина перемещения гайки вдоль винта зависит от угла поворота гайки. Следовательно, независимое относительное движение здесь одно (вращательное или поступательное), другое – зависимое и поэтому винтовая кинематическая пара является парой первого класса.
Кинематические пары делятся на пространственные и плоские.
Пространственными называются кинематические пары, точки звеньев которых в относительном движении описывают пространственные кривые.
Плоскими называются кинематические пары, точки звеньев которых в относительном движении перемещаются в параллельных плоскостях, т. е. их траектории являются плоскими кривыми.
Плоские кинематические пары могут быть только парами 1-го или 2-го классов. Действительно, свободное тело, совершающее плоскопараллельное движение обладает тремя степенями свободы: двумя поступательными движениями вдоль двух взаимно перпендикулярных осей координат х., у и одним вращательным движением вокруг оси г. перпендикулярной плоскости хоу. Но если звено образует с другим звеном кинематическую пару, то минимум на одно из этих трех движений накладывается условие связи (на движение в направлении общей нормали к профилям в точке контакта звеньев), и, следовательно, плоская кинематическая пара может иметь не более двух степеней свободы (рис. 1.2).
Плоскими кинематическими парами 1-го класса являются вращательная (см. рис. 1.1. а) и поступательная (см. рис. 1.1. б) пары. Звенья плоской кинематической пары 2-го класса могут совершать поступательное и вращательное движения (рис. 1.2. а). Примером плоской кинематической пары 2-го класса могут быть соприкасающиеся зубья двух зацепляющихся зубчатых колес (рис. 1.2 б), а также кулачок и толкатель кулачкового механизма (рис. 1.2, в).
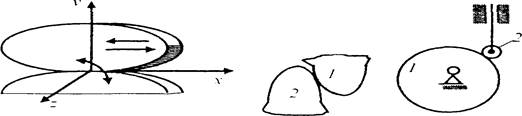
Рис. 1.2
Кинематические пары различают также по характеру соприкосновения звеньев. Поверхности, линии или точки соприкосновения звеньев, называются цементами кинематических пар. Если элементами соприкосновения звеньев являются поверхности, то кинематические пары называются низшими. Если элементами соприкосновения звеньев являются линии или точки, то кинематические пары называются высшими.
Так как в низших кинематических парах элементами соприкосновения звеньев являются площадки (поверхности), то удельное давление в них невелико, вследствие чего износ в низших кинематических парах сравнительно невелик. В высших парах элементами соприкосновения звеньев являются линии или точки, поэтому удельное давление в них очень велико, что вызывает повышенный износ звеньев. Это большой недостаток высших кинематических пар по сравнению с низшими. Однако они имеют и значительное преимущество: если количество видов низших пар ограничено, то высших — имеет большое разнообразие и практически не ограничено (профили поверхностей соприкосновения звеньев высших кинематических пар могут быть различными). Поэтому при помощи высших кинематических пар значительно проще создавать механизмы, обеспечивающие заданный закон движения.
Дата добавления: 2020-10-14; просмотров: 1040;
Поиск по сайту
Узнать еще
- III. Взаимосвязь потребления, сбережений и инвестиций. Парадокс бережливости.
- IS- диаграмма водяного пара.
- Is-диаграмма водяного пара
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- J Парадигмы (А. Ф. Бондаренко)
- TS- диаграмма для водяного пара
- Ts-диаграмма водяного пара
- TS-диаграмма для водяного пара

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
