Механизмы. Описание. Виды
Дадим определение механизма на основании понятия о кинематической цепи. Предварительно отметим, что звенья кинематической цепи, законы движения которых являются заданными, называются ведущими, остальные звенья называются ведомыми.
Механизмом называется кинематическая цепь с одним неподвижным звеном (стопкой), в которой при заданном законе движения одного или нескольких ведущих звеньев все остальные (ведомые) звенья движутся вполне определенным образом.
Рассмотрим условия, при которых кинематическая цепь будет механизмом. Известно, что точка на плоскости имеет две степени свободы и для определения ее положения необходимо задать две координаты. В случае твердого тела, имеющего при плоском движении три степени свободы, для однозначного определения его положения необходимо знать три координаты: две координаты точки, выбранной за полюс, и угол поворота некоторого отрезка, соединяющего две точки тела.
Аналогично и для кинематической цепи. Чтобы положения всех звеньев кинематической цепи относительно стойки были вполне определенными, необходимо задать столько параметров, сколько степеней подвижности (степеней свободы относительно стойки) имеет кинематическая цепь. Параметры, которые задаются кинематической цепи, определяются заданным законом движения ведущего звена (или ведущих звеньев). Поэтому, чтобы движения ведомых звеньев кинематической цепи были вполне определенными, необходимо, чтобы количество ведущих звеньев цепи было равно степени подвижности этой цепи. Только в этом случае кинематическая цепь является механизмом.
На рис. 1.4 изображены замкнутые кинематические цепи разной степени подвижности. Кинематическая цепь на рис. 1.4, а представляет собой неподвижное соединение звеньев (W = 0) и не может быть механизмом. Остальные кинематические цепи (рис. 1.4. б - ж) при определенных условиях могут быть механизмами. Так кинематическая цепь на рис. 1.4. д. станет механизмом, если будет задан закон движения двух ведущих звеньев (W = 2). Остальные кинематические цепи являются механизмами, если известен закон движения одного из звеньев цепи (W = 1). Для механизма, представленного на рис. 1.4. .ж, степень подвижности на единицу больше по сравнению с аналогичным механизмом, представленным на рис. 1.4, е. Увеличение степени подвижности механизма вызвано введением дополнительно подвижного звена – ролика с целью замены трения скольжения на трение качения.
В 1916 г. профессором Петербургского политехнического института Л. В. Ассуром был предложен следующий принцип образования механизмов: любой механизм может быть образован путем непосредственного присоединения («наслоения») сначала к ведущему звену и стойке, а затем и к любым другим звеньям кинематических цепей с нулевой степенью подвижности.
В самом деле, присоединение к ведущему звену кинематических цепей с путевой степенью подвижности (W = 0) не изменит общей степени подвижности механизма.
Кинематические цепи, обладающие нулевой степенью подвижности (степенью свободы относительно стойки), называются группами Аcсура. Все разнообразие групп Аcсура можно получить из формулы Чебышева.
Будем полагать, что кинематическая цепь состоит лишь из пар 1-го класса. Тогда для группы Аcсура с нулевой степенью подвижности (W = 0) получим
W = 3n – 2p1 = 0 (1.4)
или
P1 = (3/2)*n (1.5)
Так как количество звеньев и кинематических пар может быть только целым числом, то количество звеньев группы Ассура может быть только четным числом. Следовательно, равенству (1.5) могут удовлетворять следующие числа подвижных звеньев п и кинематических пар 1-го класса р1.
n = 2,4,6……
p1 = 3,6,9 …..
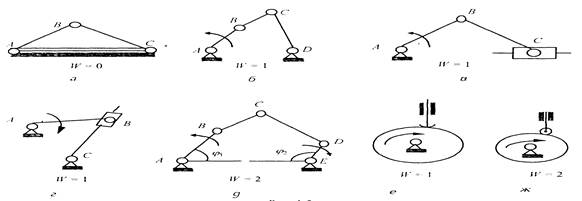
Рис. 1.4
В зависимости от количества звеньев и числа кинематических пар определяется класс группы Ассура. Так, кинематическая цепь с количеством звеньев п = 2 и количеством кинематических пар р1 = 3 является группой Ассура 1-го класса. При п = 2 и р1 = 3 будем иметь группу Ассура 2-го класса и т. д.
Примеры групп Ассура 1-го и 2-го классов представлены на рис. 1.5, а, 6.
Если присоединить любую группу Ассура к стойке, то получим кинематическую цепь с нулевой степенью подвижности, т. е. ферму (рис. 1.6, а), а если присоединить ее внешними кинематическими парами к ведущему звену и к стойке или к новым звеньям первоначального механизма, то получим новый механизм, степень подвижности которого не изменится (рис. 1.6, б).
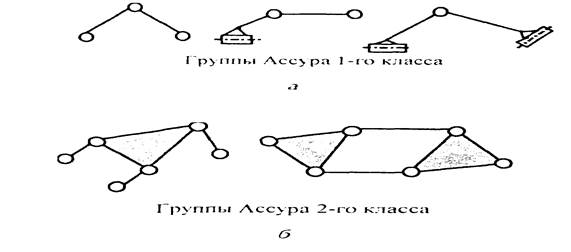
Рис 1.5
В соответствии со строением механизмы делятся на классы. Класс механизма зависит от классов групп Ассура, входящих в его состав. Если в состав механизма входят группы Ассура различных классов, то номер класса механизма определяется номером класса наивысшей группы Ассура. На рис. 1.6. б изображен механизм, в состав которого входят группы Ассура 1-го и 2-го классов. Исходя из сказанного выше, данный механизм является механизмом 2-го класса.
Механизмы, не содержащие групп Ассура, а состоящие только из ведущего звена, относятся к механизмам нулевого класса. Такие механизмы встречаются на практике довольно часто. К ним, например, относятся механизмы электродвигателей, генераторов и так далее.
Рассмотренная классификация механизмов не является единственной. Существуют также другие виды классификаций. Широко используется практическая классификация механизмов, которая в общих чертах учитывает основные кинематические свойства и конструктивные особенности механизмов, а в отдельных случаях и функциональное назначение.
В соответствии с практической классификацией механизмы делятся на следующие виды:
а) зубчатые передачи;
б) фрикционные передачи;
в) передачи с гибкой связью;
г) винтовые механизмы;
д) кулачковые механизмы;
е) рычажные механизмы;
ж)механизмы прерывистого действия;
з)электромагнитный механизмы и др.
На рис. 1.7 представлены кинематические схемы механизмов в соответствии с практической классификацией:
фрикционные механизмы: цилиндрический (а) и конический с постоянным передаточным отношением (б), с переменным передаточным отношением (в):
кулачковые механизмы: с поступательно движущимся (г) и качающимся (д) толка гелем;
механизм с гибкой связью (е)
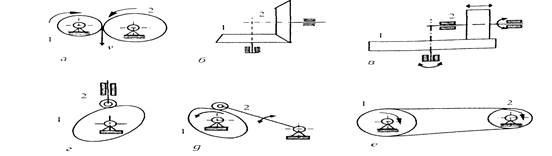
Рис 1.6
Дата добавления: 2020-10-14; просмотров: 712;
Поиск по сайту
Узнать еще
- I. Определение, виды радиоактивности, радиоактивные семейства
- II. Виды ионизирующих излучений и единицы измерения ИИ
- II. ЭКОНОМИЧЕСКАЯ ПОЛИТИКА, ее цели и виды. ФИАСКО ГОСУДАРСТВА
- А.2 Виды адсорбентов и их характеристики
- Автоматизированные рабочие места, назначение и их виды
- Автоматизированные рабочие места: назначение, состав, виды обеспечения
- Автономия в зарубежных странах: понятие и виды
- Авторитарный политический режим: понятие, признаки, виды

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
