Методические указания по изучению устройства башенного крана КБ-403Б
Кран КБ-403Б (рис. 6.1) выполнен на рельсовом ходу и состоит из ходовой рамы 1 с флюгерами 2 и ходовыми тележками 3, поворотной платформы 4 с размещенными на ней грузовой 5 и стреловой 6 лебедками, механизмом поворота 7, противовесом 8, башни с распоркой 9 и навесной кабиной 10, балочной стрелой 11 с грузовой тележкой 12 и механизмом 13 ее передвижения.
Ходовая рама 1 крана представляет собой сварное кольцо коробчатого сечения, которое проушинами шарнирно соединено с четырьмя диагонально расположенными флюгерами 2. Флюгера через цапфы опираются на ходовые тележки, две из которых ведущие. Шарнирное соединение флюгеров с ходовой рамой и тележками, которые выполнены балансирными, облегчает прохождение крана по закруглениям рельсового пути.
Для предотвращения угона крана в нерабочем состоянии ветром, тележки снабжены противоугонными захватами. Поворотная платформа 4 опирается на ходовую раму 1 с возможностью вращения в горизонтальной плоскости. Это соединение осуществлено с помощью роликового опорно-поворотного устройства 14, выполняющего роль подшипника для вращения поворотной платформы.
Составная, телескопическая башня решетчатой сварной конструкции, выполненная из труб, установлена на поворотной платформе шарнирно и удерживается в вертикальном положении посредством подкосов 15. Башня состоит из портала 16, секций 17, оголовка 18, распорки 9 и механизма выдвижения. Удлинение башни осуществляется снизу на необходимую высоту по мере возведения строящегося объекта.
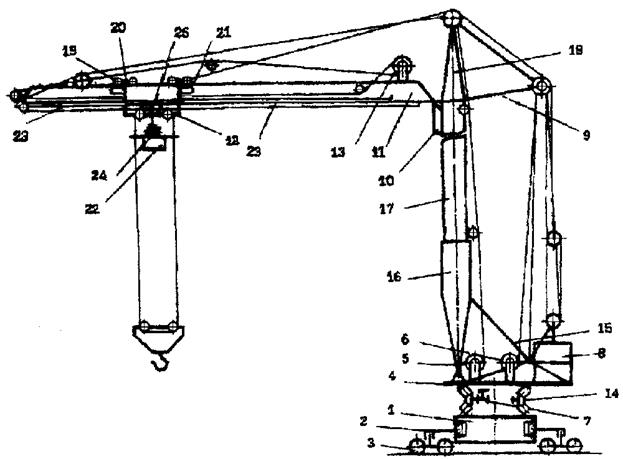
Рис. 6.1 Общий вид башенного крана КБ-403 Б
В верхней части башни крепится кабина 10 и стрела 11, выполненная сварной из труб. Стрела имеет направляющие для перемещения грузовой тележки в виде продольных уголков.
Стрела состоит из четырех секций и может иметь длину 20, 25, 30 м.
Для увеличения высоты подъема груза стрела длиной 20 и 25 м может устанавливаться под углом 30о и 50о. Грузовая тележка 12 опирается на направляющие стрелы четырьмя парами роликов 19, которые для равномерного распределения нагрузок соединены с рамой тележки балансирами 20. Для устранения перекосов при движении тележка снабжена четырьмя боковыми роликами 21.
Привод крана выполнен многомоторным, индивидуальным с питанием электродвигателей от сети трехфазного переменного тока и содержит пять механизмом: грузовой, стреловой, передвижения тележки (тележечный), поворота платформы и передвижения крана по рельсам.
Каждый механизм снабжен отдельным реверсивным двигателем. На кране установлены три электрические реверсивные лебедки: грузовая, стреловая и тележечная.
Грузовой механизм крана состоит (рис. 6.2) из лебедки 1, каната 2, закрепленного на барабане лебедки и огибающего неподвижный блок 3 на оголовке башни, неподвижные блоки 4 и 5 на головной части стрелы, неподвижные блоки 6 и 7 на раме 8 грузовой тележки, подвижные блоки 9 и 10 крюковой подвески 11, содержащей крюк 12. Грузовой канат образует двухкратный грузовой полиспаст 13. Второй конец грузового каната прикреплен к стреле через ограничитель грузоподъемности 14, который автоматически отключается грузовую лебедку при превышении установленной грузоподъемности.
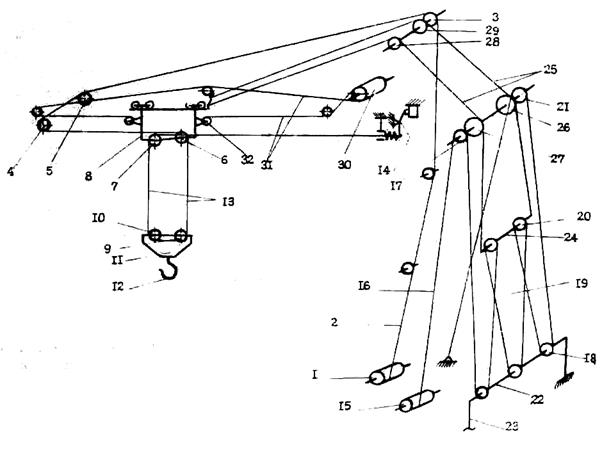
Рис. 6.2. Схема запасовки канатов
Грузовая лебедка выполнена двухдвигательной. Электродвигатели соединены последовательно с ведущим валом редуктора и включаются автоматически в зависимости от массы поднимаемого груза. Для подъема груза массой до 2 т со скоростью 58 м/мин включается один из двигателей. Для подъема груза массой более 2 т со скоростью 40 м/мин включается другой двигатель, имеющий меньшую частоту вращения.
Стреловой механизм крана (см. рис. 6.2) состоит из лебедки 15, каната 16, закрепленного на барабане лебедки, и огибающего неподвижный блок 17 на распорке башни, три блока 18 неподвижной обоймы 22 и два блока 20 подвижной обоймы 24 стрелового полиспаста 19. Второй конец стрелового каната 16 закреплен на поворотной платформе. Неподвижная обойма 22 стрелового полиспаста крепится к поворотной платформе через две оттяжки 23. Подвижная обойма 24 стрелового полиспаста 19 соединена со стрелой посредством стрелового расчала 25, состоящего из двух канатов, которые огибают блоки 26 и 27 на распорке башни и блоки 28 и 29 на оголовке башни. Стреловой полиспаст четырехкратный.
Стреловая унифицированная лебедка крана Л-600С имеет обычную типовую конструкцию.
Замкнутый канатный привод передвижения грузовой тележки 8 состоит из лебедки 30 (см. рис. 6.2), установленной на стреле, тележечных канатов 31 и двух барабанов 32, снабженных храповыми остановами для натяжения тележечных канатов. Тележечные канаты левыми концами закреплены на барабане 32 с противоположных сторон тележки, а правыми концами – с противоположных сторон барабана 30.
При вращении барабана по часовой стрелке тележка перемещается вправо и вылет груза уменьшается. При вращении барабана против часовой стрелки тележка перемещается влево и вылет груза увеличивается.
Кран снабжен ограничителем высоты подъема груза (см. рис. 5.2). Упор 22 ограничителя подвешен к стреле посредством каната 23, огибающего два блока 24 на упоре и два блока 25 на тележке. Левый конец каната 23 прикреплен к передней части стрелы, а правый – к рычагу конечного выключателя, расположенного на задней части стрелы. Натяжением каната 23 под действием веса упора 22 конечный выключатель замыкает цепь питания электродвигателя грузовой лебедки. При подъеме груза на максимальную высоту крюковая подвеска приподнимает упор 22. При этом канат 23 перестает воздействовать на конечный выключатель, который обесточивает двигатель. Подъем груза автоматически прекращается.
Устройство для вращения поворотной платформы крана (рис. 6.3) состоит из механизма поворота и опорно-поворотного устройства. Механизм поворота осуществляет принудительное вращение поворотной платформы, а опорно-поворотное устройство является для нее подвижной опорой (подшипником).
На кране КБ-403Б установлен унифицированный механизм поворота, применяемый для башенных кранов серии КБ. Механизм состоит из установленных в одном блоке электродвигателя 1, колодочного тормоза 2, трехсту-
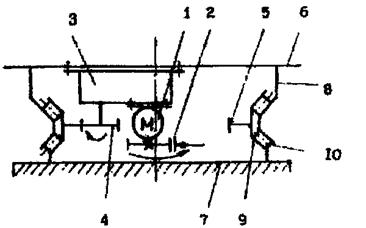
Рис. 6.3. Схема механизма вращения поворотной платформы
пенчатого цилиндрического редуктора 3 и шестерни 4, закрепленной на ведомом валу редуктора. Шестерня 4 зацеплена с внутренними зубьями зубчатого венца 5, который выполнен за одно целое с внутренней обоймой 9 опорно-поворотного устройства. Корпус редуктора 3 прикреплен к поворотной платформе. Электродвигатель 1 имеет фланцевое крепление к редуктору.
Поворотная платформа 6 установлена на ходовой раме 7 посредством роликового двухрядного опорно-поворотного устройства. Оно, как и обычный подшипник качения, состоит из двух обойм (колец): наружной 8, внутренней 9 и двух рядов тел качения (роликов) 10 между обоймами. Причем наружная обойма 8 соединена с поворотной платформой 6, а внутренняя обойма 9 вместе с зубчатым венцом 5 соединена с ходовой рамой 7. При вращении поворотной платформы ходовая рама, обойма 9 и венец 5 остаются неподвижными, а относительно их совершает горизонтальное вращение поворотная платформа вместе с наружной обоймой 8, перекатывающейся на роликах по внутренней неподвижной обойме 9.
При включенном электродвигателе 1 через редуктор 3 приводится во вращение шестерня 4, которая, обкатываясь по зубьям венца 5,совершает планетарное движение и увлекает во вращение сам механизм поворота, а вместе с ним и поворотную платформу 6.
Дата добавления: 2016-07-22; просмотров: 4641;
Поиск по сайту
Узнать еще
- II. Общие методические принципы в канистерапии
- II. Особенности политического устройства Ирана
- II. УЧЕБНЫЕ И МЕТОДИЧЕСКИЕ ПОСОБИЯ, ПРАКТИКУМЫ
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- XLII. ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА
- А. Электронные устройства на ОУ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
