Строительные подъемники
Строительные подъемники предназначены для подъема (опускания) в грузонесущих органах строительных грузов и людей на этажи и кровлю зданий и сооружений при выполнении строительно-монтажных, отделочных и ремонтных работ. Грузонесущие органы строительных подъемников (клеть, кабина, платформа, ковш, крюк, бункер, бадья, захваты и т. д.) движутся, как правило, по вертикальным жестким направляющим.
Строительные подъемники классифицируют по назначению, способу установки, конструкции направляющих, типу грузонесущего органа и механизма подъема, способу монтажа и степени мобильности.
По назначению различают грузовые подъемники, предназначенные только для транспортирования грузов, и грузопассажирские - для транспортирования грузов и людей.
По способу установки подъемники делят на передвижные (самоходные и несамоходные) способные перемещаться относительно здания в процессе работы, и стационарные, которые могут быть приставными, прикрепляемыми к зданию, и свободностоящими - без крепления к зданию. Передвижные подъемники на рельсовом или пневмоколесном ходу используются сравнительно редко.
По конструкции направляющих грузонесущего органа различают подъемники с подвесными (гибкими) и жесткими направляющими. Подъемники с жесткими направляющими бывают мачтовыми, скиповыми и шахтными. Тип грузонесущего органа подъемника определяется его назначением. Грузопассажирские подъемники оборудуются кабинами, грузовые - выдвижными и невыдвижными, поворотными и неповоротными платформами, выдвижными рамами, выкатными консолями, монорельсами и направляющими с подвесной клетью, а также саморазгружающимися ковшами. Механизмы подъема подъемников разделяются на канатные и бесканатные. В канатных механизмах подъема используются канатно-блочная система и лебедка, в бесканатных - зубчато-реечные или цевочно-реечные механизмы модульного типа.
По способу монтажа подъемники делятся на мобильные, перевозимые с объекта на объект в собранном виде, и немобильные, разбираемые при демонтаже на секции и перевозимые в таком виде к месту монтажа.
Главным параметром подъемников является грузоподъемность - максимально допустимая масса груза, поднимаемая подъемником. К основным параметрам относятся: наибольшая высота подъема груза (расстояние по вертикали от уровня земли до нижнего уровня груза, находящегося в крайнем верхнем положении); скорость подъема и опускания груза; величина перемещения груза по горизонтали (максимальное расстояние от оси мачты подъемника до конца платформы, производительность и т. д.
В строительстве получили преимущественное применение мачтовые грузовые подъемники.
Унифицированный грузовой мачтовый подъемник ТП-16-3 грузоподъемностью 320 кг имеет рабочие органы в виде выкатной платформы, с помощью которой осуществляются подъем и горизонтальная подача в проемы зданий строительных материалов и опускание их на кровлю и перекрытия при выполнении строительных, отделочных и ремонтных работ.
Подъемник ТП-16-3 (рис. 6.4, а) состоит из мачты, опорной рамы 10, лебедки 1, грузовой каретки 7 с выкатной платформой 8, грузового каната 3, настенных опор 4 и электрооборудования. Мачта подъемника крепится к зданию настенными опорами и состоит из рядовых 6, верхней 5 и нижней 9 секций и смонтирована на опорной раме, на которой установлены лебедка ТЛ-14А с канатоведущим шкивом и шкаф электрооборудования 2. Лебедка с помощью грузового каната обеспечивает подъем и опускание грузовой каретки с выкатной платформой, с помощью которой груз поднимается на соответствующий этаж и подается в оконный проем или на кровлю. Выкатная платформа состоит из рамы, ограждения, механизма горизонтального перемещения выкатной платформы и грузоподъемного механизма. Механизм перемещения грузовой платформы имеет ручной привод и состоит из рукоятки в сборе с водилом. Грузоподъемный механизм (рис. 6.4 а) смонтирован в нижней части выкатной платформы и предназначен1 для подъема на крюке грузов штучных, затаренных в ящики и бадьи, сыпучих и жидких. Механизм включает барабан 3 с ручным приводом от системы телескопических рычагов 6, запасованный на барабан канат и крюковую подвеску 2.
С помощью подъемного механизма груз можно опускать внутри проема на перекрытие, а также на землю в нижнем положении грузовой каретки. Грузовая каретка подвешена на грузовом канате (см. рис. 6.4, б) и опирается роликами на направляющие элементы мачты. Грузовой канат 3 огибает головной блок 11 мачты, блок 12 грузовой каретки и крепится на мачте. В случае обрыва или ослабления грузового каната торможение грузовой каретки обеспечивается эксцентриковым ловителем. Перемещение грузовой каретки вверх и вниз ограничивается предохранительным устройством, отключающим также привод лебедки при выдвижении выкаткой платформы. В подъемнике ТП-16-3 предусмотрена возможность адресования груза на заданный этаж. Пусковая аппаратура подъемника расположена в электрошкафу. Для дистанционного управления приводом лебедки используется выносной кнопочный пост. С объекта на объект подъемник перевозятся в разобранном виде с помощью автотранспортных средств.
Изучаемый в данной работе грузоподъемный механизм (рис. 6.4, в) состоит из следующих элементов: электрореверсивной лебедки Т-66Г, грузового полиспаста, мачты и измерительного комплекса.
Электрореверсивная лебедка Т-66Г состоит из смонтированных на раме электродвигателя 1, тормоза 2, редуктора 3 и барабана 4.
Для электрореверсивных лебедок характерна жесткая кинематическая связь барабана с электродвигателем, при которой изменение направления
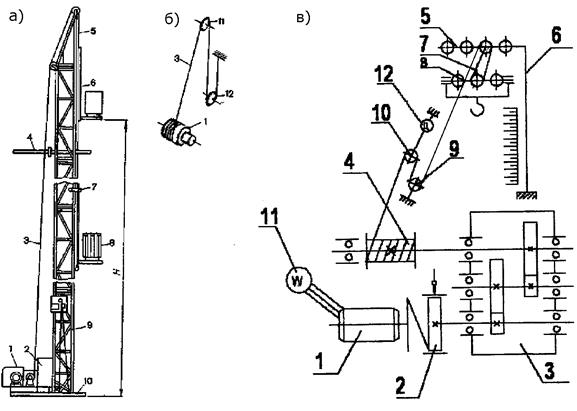
Рис. 6.4 Строительные подъемники: а - грузовой мачтовый подъемник ТП-16-3; б - схема запасовки грузового каната грузового мачтовый подъемник ТП-16-3; в - электрореверсивная лебедка Т-66 Г.
вращения барабана достигается изменением направления вращения (реверсированием) двигателя.
У электрореверсивной лебедки вал электродвигателя и барабан постоянно и жестко связаны зубчатыми парами цилиндрического редуктора и упругой муфтой.
Опускание груза в таких лебедках производится принудительно (на режиме двигателя), что обеспечивает высокую безопасность их работы.
Питание привода лебедки осуществляется от сети переменного тока напряжением 380/220 В через трехполюсный рубильник и силовые контакты магнитного пускателя.
Управление электродвигателем происходит при помощи кнопочной станции с двумя кнопками, которые служат для подъема и опускания груза. Эти операции осуществляются при нажатии и держании соответствующих кнопок; при отпускании их барабан автоматически останавливается и затормаживается. Цапфы барабана опираются на радиально-сферические подшипники, один из которых заключен в корпусе редуктора Полу муфты, связывающие электродвигатель и редуктор, соединены между собой резиновыми вкладышами. Ведомый шкив - полумуфту - охватывают колодки гидравлического тормоза, шарнир но закрепленные на рычагах. При затормаживании под действием сжатой пружины рычаги поворачиваются на пальцах и прижимают колодки к поверхности тормозного шкива. При этом толкатель не работает; его шток находится в нижнем положении. При включении толкателя поршень выдвигает шток вверх, и рычаги, освободившись от действия пружины, расходятся, растормаживая шкив. Растормаживание заканчивается при достижении поршнем толкателя крайнего верхнего положения.
Грузовой полиспаст предназначен для подъема грузов и состоит из верхней обоймы (четыре неподвижных блока) 5, подвешенной на гуське мачты 6, и нижней обоймы (три подвижных блока) 7, подвешенной на канате 8 (см. рис. 6.4).
В грузоподъемных машинах применяются полиспасты, характерной особенностью которых является подвеска груза к подвижной обойме. Полиспаст, образованный неподвижной обоймой 5, подвижной обоймой 7 и охватывающим их канатом 8, используется для выигрыша в силе.
Основным параметром полиспаста является его кратность (рис 6.5), которая зависит от числа подвижных и неподвижных блоков в обоймах и направления сбегания каната. Если канат сбегает с блока неподвижной обоймы, кратность полиспаста равна числу задействованных подвижных и неподвижных блоков; если канат сбегает с блока подвижной обоймы, - кратность такого полиспаста на единицу больше.
В изучаемом грузоподъемном механизме канат сбегает с блока неподвижной обоймы полиспаста, поэтому его кратность всегда равна числу блоков, т. е.

где  - число задействованных блоков полиспаста.
- число задействованных блоков полиспаста.
Если свободный конец каната закреплен  на верхней обойме, кратность полиспаста будет четной, если - на нижней, - нечетной. Кратность полиспаста показывает, во сколько раз имеет место выигрыш в силе.
на верхней обойме, кратность полиспаста будет четной, если - на нижней, - нечетной. Кратность полиспаста показывает, во сколько раз имеет место выигрыш в силе.
Схемы запасовки каната грузового полиспаста для выигрыша в силе и получения заданной кратности показаны на рис. 6.5
В полиспастах для выигрыша в скорости (обратный полиспаст) усилие прикладывается к неподвижной обойме. В изучаемом грузоподъемном механизме имеется и обратный полиспаст. Он образован неподвижным блоком 9, подвижным блоком 10 (к которому приложено усилие) и охватывающим их канатом 8. Передаточное отношение этого полиспаста равно 1/2.
В измерительный комплекс изучаемого грузоподъемного механизма входят ваттметр 11, предназначенный для измерения потребляемой электродвигателем мощности, и динамометр 12 для измерения тягового усилия каната на барабане. Ваттметр включен в систему питания электродвигателя лебедки, а динамометр через систему блоков закреплен на сбегающей ветви грузового полиспаста. В измерительный комплекс входят также тахометр, секундомер и мерная линейка.
Основными технико-эксплуатационными параметрами лебедки или грузоподъемного механизма являются: тяговое усилие каната на барабане лебедки, скорость каната при навивке его на барабан и канатоемкость барабана.
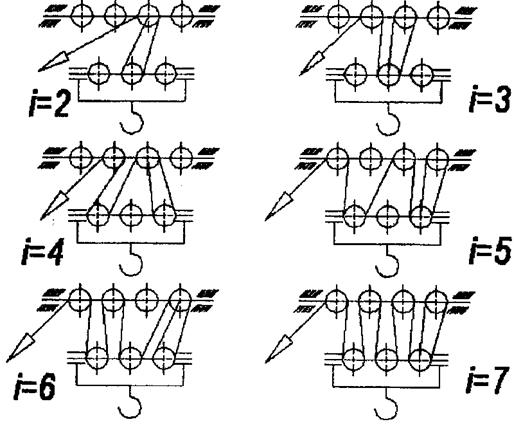
Рис. 6.5. Схемы запасовки каната грузового полиспаста
Для экспериментальной проверки необходимо произвести следующие замеры: число оборотов барабана, тяговое усилие на барабане, высоту подъема груза, время подъема груза и мощность двигателя.
| Технические характеристики лебедки Т-66Г: | |||
| Тяговое усилие, Н - Диаметр барабана, 10-3 м - Диаметр бортов барабана, 10-3 м - | |||
| Длина барабана, 10-3 м - Тормоз - Редуктор - Передаточное число - Электродвигатель типа - Мощность, кВт – Частота вращения, с-1 – | ТТ-160 РМ-250-Ш-4 31,5 АОС-42-2Щ2 2,8 23,3 | ||
| Технические характеристики грузового полиспаста: | |||
| Число блоков в неподвижной обойме, шт. -Число блоков в подвижной обойме, шт. - Диаметр каната, 10-3м - Диаметр блоков, 10-3м - Масса грузозахватного приспособления, кг - | 5,5 1,0 | ||
Дата добавления: 2016-07-22; просмотров: 3746;
Поиск по сайту
Узнать еще
- Бетон, железобетон и строительные растворы
- Воздушные водоподъёмники (эрлифты).
- Воздушные подъемники (эрлифты)
- ГЛАВА 10. СТРОИТЕЛЬНЫЕ МАТЕРИАЛЫ И ИЗДЕЛИЯ ИЗ НИХ
- ГЛАВА 8 ОБЩЕСТРОИТЕЛЬНЫЕ МЕРОПРИЯТИЯ
- ГОСТ 12.3.033-84 Строительные машины. Общие требования безопасности при эксплуатации
- Градостроительные аспекты преодоления экологического кризиса.
- Грунты и их строительные свойства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
