Принимающее судно; 2 - передающее судно; 3 - кранцы; 4 — креплениекранцев. 10 глава
Выразим перемещения точки подвеса О от качки судна через декартовы координаты

Таким образом, мы установили закон перемещений точки подвеса каната в процессе качки судна. При решении практических задач уравнения (16) необходимо составлять так, чтобы в рассмотрение вошел наиболее неблагоприятный случай, который может быть выражен, например, следующим образом:

Вследствие непрерывного перемещения точек подвеса груз начнет совершать колебания (кинематическое возбуждение). Для составления дифференциальных уравнений колебаний груза применим метод Лагранжа. Поскольку рассматривается случай переменной длины каната, то груз будет иметь три степени свободы. В качестве обобщенных координат выберем: угол у, характеризующий положение плоскости Р (рис. 105, в), проходящей через канат, и ось О'х', параллельную Ох; угол φ , характеризующий отклонение каната в плоскости Р от линии O'D, совпадающей при y = 0 с отвесным положением; линейную координату q, направленную вдоль каната и характеризующую его удлинение.
Обобщенные силы, соответствующие своим обобщенным координатам, выразятся следующим образом:
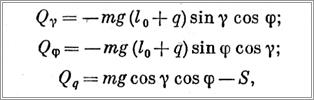
где l0 — длина каната в момент времени t = 0.
Проекции скоростей на оси декартовой системы отсчета

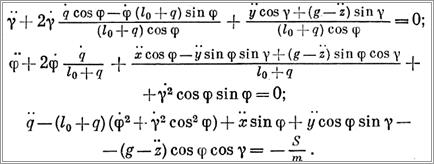
Найдя по формуле (9) абсолютную скорость груза и вычислив по первой формуле (7) его кинетическую энергию, используя формулы (8), получим дифференциальные уравнения колебаний груза
Решение системы уравнений (18) может быть выполнено на ЭВМ. Если удлинение каната происходит с постоянной скоростью, т. е. q = vM - const, то первые два уравнения системы становятся независимыми от третьего; их решение позволит исследовать колебания груза, решение же третьего уравнения даст возможность установить закон изменения натяжения каната.
Практически при грузовых операциях судно испытывает раздельно или продольную качку (при постановке на якорь) или поперечную (в дрейфе на больших глубинах, когда постановка на якорь неосуществима). Поэтому с целью упрощения расчета систему уравнений (18) можно разделить на две:
— для продольной качки (θ = 0, £е = 0, η = 0, у = 0)
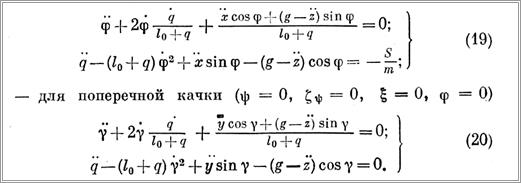
В системах (19) и (20) при q = v = const первые уравнения будут также независимыми от вторых. Решение их на ЭВМ, например, методом Рунге — Кутта не вызывает никакой сложности.
§ 42. Динамика груза, подвешенного к крану на двух канатах (бифилярный подвес)
Схема бифилярного подвеса груза представлена на рис. 106. Рассмотрим некоторые особенности его расчета для случая, когда плоскость бифиляра перпендикулярна вертикальной плоскости Р, проходящей через ось стрелы крана.
Равномерный поворот крана при постоянном вылете стрелы
Расчет углов у0 и радиуса - р (см. рис. 103) при бифилярном подвесе производится по формулам
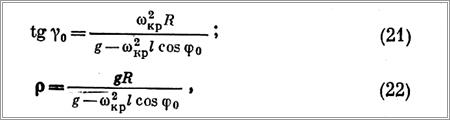
справедливым (см. § 41) при
Натяжение канатов S равно
Внезапное прекращение поворота крана
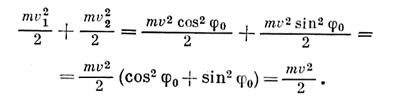
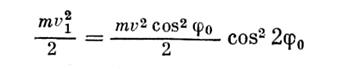
Пусть в момент остановки крана груз имел линейную скорость v (см. рис. 106). Принимая допущение об абсолютной неупругости каната, можно считать, что на отклонение груза от положения равновесия (т. е. на подъем груза) будет затрачена только та часть кинетической энергии груза  ,которая обусловлена скоростью v1 =v соsφ0, т.е.
,которая обусловлена скоростью v1 =v соsφ0, т.е.  . Другая
. Другая
часть кинетической энергии, обусловленная скоростью v2 = v sin φ, т. е.
, будет полностью израсходована на деформацию каната. Заметим, что
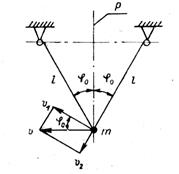
Рис. 106. Бифилярный подвес груза.
Пренебрегая углом у0 (см. рис. 103) и деформацией каната, используя теорему об изменении кинетической энергии, найдем

откуда угол максимального отклонения груза от положения равновесия фшах будет равен

Колебания груза при неподвижной точке подвеса и постоянной длине каната
Колебания груза в плоскости Р (см. рис. 106) отличаются от колебаний груза, подвешенного на одном канате [выражение (14)], только тем, что радиусом колебаний будет не длина каната l, а ее проекция на плоскость Р, т. е. величина lP = l cos φ0, что и следует учесть в уравнении (14). При колебаниях груза в плоскости бифиляра будут наблюдаться два совершенно различных явления. Остановимся на этих явлениях и рассмотрим их более подробно.
Пусть, например, вследствие внезапного прекращения поворота крана груз выйдет из положения статического равновесия и начнет движение влево (по рис. 106 и 107), как это было установлено выше, со скоростью v cos φ0 до положения, определяемого углом фmaх, рассчитываемым по выражению (23). Ветвь бифиляра ОБ будет при этом натянутой, а ветвь О1Б прослабленной. Достигнув указанного положения, груз устремится к положению статического равновесия, отмеченному на рис. 107 точкой Δ. Пренебрегая потерями, будем считать, что груз возвращается в точку В с той же скоростью v cos φ 0, с которой он начал движение влево из этой точки. Движение груза влево и обратно представляет собой обычные колебания, описываемые уравнением (14), происходящие относительно центра О при следующих начальных условиях:
t = 0, φ=φо, φ = φ0 = vcosφ0/2. В момент прихода груза в точку
В левая ветвь бифиляра О1В резко натягивается, а груз «стремится» продолжать движение по дуге окружности радиусом l и с центром в точке О. Левая ветвь О1В исключает возможность такого движения, в результате чего груз резко меняет направление своей скорости (с v cos φо на v1), т. е. переходит на новую траекторию с тем же радиусом l, но с новым центром О1. Это явление носит характер удара, направленного в левую ветвь каната О1В и
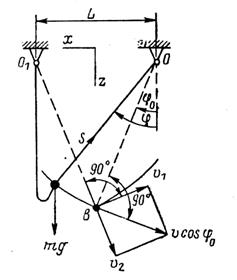
Рис. 107. Колебания груза при бифилярном подвесе.
обусловленного составляющей скорости v2 (см. рис. 107). Если считать канат абсолютно неупругим, кинетическая энергия

будет затрачена на неупругую деформацию каната. Кинетическая энергия
обусловливает движение груза вправо по окружности радиусом l (деформацией каната пренебрегаем) с центром в точке Ох. Это движение, естественно, также будет описываться уравнением (14), но с новыми начальными условиями:  .
.
Очевидно, что при принятом допущении об абсолютной неупругости каната величину, получаемую из отношения

можно считать коэффициентом восстановления при ударе в канат. Из этого следует, что величину

можно назвать противораскачивающей способностью бифилярного подвеса. При φ0 = 0 противораскачивающая способность р также равна нулю, при φ=45° р = 100%.
Таким образом, колебания груза в плоскости бифиляра носят скачкообразный затухающий характер. Собственно колебания описываются уравнением (14). В процессе колебаний канат считается идеальной связью, т. е. абсолютно жестким. Решая уравнение (14), необходимо следить за положением груза, т. е. за углом ср. Когда текущее значение угла ср станет равным значению φ0, расчет приостанавливается и в уравнение (14) вводятся новые начальные условия:

После этого расчет по уравнению (14) возобновляется и т. д. При такой методике расчета углы φ будут получаться всегда положительными вне зависимости от направления колебаний.
В момент удара канат считается абсолютно неупругим. Натяжение в канате при ударе можно определить, используя теорему об изменении кинетической энергии, согласно которой

где Sд — величина динамического натяжения каната; δ Д = Sд/с - динамическая деформация (удлинение) каната; с — жесткость каната.
После преобразований получим

Колебания груза при неподвижных точках подвеса и переменной длине ветвей канатов
Колебания груза в плоскости Р (см. рис. 106) будут описываться уравнениями:
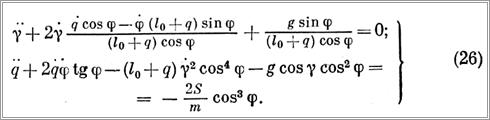
Уравнения (26) имеют единые начальные условия (см. § 41), решение их непрерывно. Для решения системы уравнений (26) необходимо иметь третье уравнение, выражающее закон изменения во времени угла φ

Колебания в плоскости бифиляра будут описываться уравнениями (15), но решение их будет прерывно, т. ё. с вводом новых начальных условий каждый раз при переходе грузом положения статического равновесия. Поэтому в процессе решений уравнений (15) необходимо следить за углом φi и, когда он достигнет значения φ0i-, определяемого формулой

необходимо в уравнение (15) ввести новые начальные условия (L — расстояние между точками подвеса; см. рис. 107): φоi — по формуле (28) и

Величину натяжения каната в момент перехода грузом положения статического равновесия можно определить по формуле

Колебания груза при периодических перемещениях точек подвеса и переменной длине ветвей канатов
В общем случае колебания груза будут описываться уравнениями (18). Параллельно с решением Системы уравнений (18) необходимо вести вычисление угла φ 0i по формуле (28) и, когда текущее значение угла φi, определяемое путем решения системы (18), станет равным φ0i, в систему (18) надо будет ввести новые начальные условия, определяемые по формулам (28) и (29).
Если рассматривать раздельно продольную и поперечную качки, считая при этом, например, что стрела крана занимает траверзное положение по отношению к судну, то закон колебаний груза будет выражаться следующим образом: при продольной качке — уравнениями (19), при поперечной качке — уравнениями
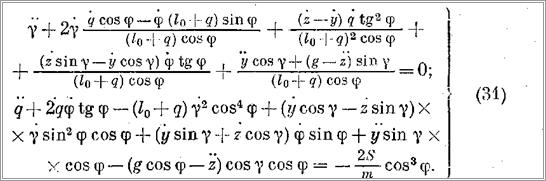
Расчет колебаний при продольной качке судна, выполняемый по уравнениям (19), следует производить параллельно с расчетом угла φoi по формуле (28), т. е. с периодическим введением новых начальных условий по формулам (28) и (29). Расчет колебаний при поперечной качке по уравнениям (31) производится непрерывно с едиными начальными условиями, но совместно с решением уравнения (27), выражающего закон изменения во времени угла φ. Если скорость механизма подъема крана v„ постоянна, то q = vm, q= vMt. В этом случае первые уравнения систем (19), (26) и (31) становятся независимыми от вторых.
Указанная методика применима для схем устройств, приведенных в гл. II (см. рис. 19 и 20).
Дата добавления: 2020-08-31; просмотров: 628;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
