Принимающее судно; 2 - передающее судно; 3 - кранцы; 4 — креплениекранцев. 6 глава
Обычно делается следующая разметка: в центре ВПП в подкрепленной ее части наносится краской круг диаметром 9 м (выбор такого диаметра обусловлен тем, что обычно ширина шасси грузовых вертолетов не превышает 9 м), а подкрепленные участки отмечаются диагональными полосами. Площадка покрывается нескользящим веществом и оборудуется устройствами для крепления вертолета. Стоянка вертолета на палубе без крепления допускается при бортовой и килевой качке с амплитудами : соответственно до 5 и 3° и вертикальной качке до 6 м.
Идеальным местом для расположения ВПП является палуба в районе мидель-шпангоута, однако по разным причинам это не всегда возможно.
Таблица 10
Основные летно-технические данные вертолетов, применяемых для передачи грузов в море
| Основные характеристики | Тип вертолета | |||||
| UH-46A, США | UH-46D, США | Wessex, Англия | Alonette-III, Франция | SHSS-2, Канада | SH-341, Нидерланды | |
| Тип, количество и мощность двигателей, л. с. | T-58-GE-8E 2 X 1250 | T-58-GE-10 2 X 1400 | 13 Мк 161 1 X 1450 | Turbomeca 1 X 870 | T-58-GE-10 2 X 1499 | Wright-1820-84 1 X 1525 |
| Диаметр несущего винта, м | 15,24 | 15,54 | 17,07 | 11,0 | 18,9 | 14,25 |
| Длина вертолета, м | 25,4 | 25,4 | 20,03 | 12,82 | 16,69 | 17,27 |
| Ширина фюзеляжа, м | 4,4 | 4,4 | 3,4 | 2,6 | 4,98 | 3,94 |
| Высота, м | 5,17 | 5,17 | 4,93 | 2,97 | 5,13 | '4,85 |
| Взлетная масса, кг | 10 433 | |||||
| Грузоподъемность, кН (т) | 27 (2,75) | 44,5 (4,54) | 17,6 (1,8) | 9,8 (1,0) | 4,4(0,45) | |
| Максимальная скорость полета, км/ч | 190,8 | |||||
| Дальность полета с нормальным запасом топлива, км |
Способ передачи грузов с помощью тросовой лебедки, установленной на вертолете, состоит в том, что груз из кабины вертолета через люк опускается на палубу корабля с помощью троса. Большинство грузовых вертолетов оборудовано подобными лебедками {обычно таким способом передаются легкие грузы массой до 300 кг). Лебедка работает от гидропривода и имеет грузовой канат длиной до 30 м.
В случае необходимости даже при отсутствии на принимающем корабле ВПП всегда можно найти место на палубе для выгрузки груза.
При использовании двухмоторных вертолетов со специальным освещением передача грузов может осуществляться в ночное время. Этим способом передача грузов может выполняться при волнении моря и скорости ветра, которые в два раза превышают величины, допускающие посадку вертолета на палубу корабля.
Способ транспортировки грузов на внешней подвеске под вертолетом (рис. 77) позволяет переносить груз на большие расстояния в подвешенном состоянии. При этом размер и форма грузов не ограничены, однако грузы низкой плотности и крупногабаритные создают дополнительное сопротивление и снижают скорость полета.
Как правило, длина троса для внешней подвески не должна быть большой, чтобы не увеличить раскачивание груза. Поэтому место для груза на корабле выбирается с таким расчетом, чтобы вертолет мог зависнуть над палубой на небольшой высоте, причем отстройка груза не должна превышать одной минуты.
Два последних способа передачи грузов представляют больший интерес с точки зрения сохранения тактических свойств боевого корабля. Корабли при этом полностью сохраняют скорость хода, возможность маневрирования и использования своего оружия для самообороны, что увеличивает их безопасность при атаках подводных лодок и авиации противника.
В ВМС США, Великобритании, Франции, Канады, Нидерландов и Швеции проявляют повышенный интерес к системам устройств для безопасной посадки вертолета на палубу корабля в штормовую погоду. В настоящее время существуют две такие системы. Одна, так называемая гарпунная, состоит из стальной сетки, смонтированной в центре ВПП, и гарпуна, установленного на вертолете. Гарпун приводится в действие от специального гидропривода. При посадке вертолета он выпускается и автоматически захватывается за металлическую сетку, после чего происходит подтягивание вертолета к палубе корабля. При взлете летчик с помощью дистанционного управления освобождает гарпун от сетки. Это устройство просто и удобно монтируется на любом судне и позволяет производить посадку и взлет вертолета при бортовой качке с амплитудой 15° и килевой качке с амплитудой 5°.
Другая система гораздо сложнее и требует значительного корабельного оборудования (рис. 78). Однако она позволяет осуществлять посадку и взлет вертолета при повышенном волнении. Более того, это устройство обеспечивает передвижение вертолета В судовой ангар и из него.

Рис. 77. Передача грузов вертолетом-краном фирмы Sikorsky в сетке на внешней подвеске.
Устройство было разработано канадской фирмой Fairay Canada Ltd. и получило название «Вeаr Тrар» (медвежий капкан).
Посадка вертолета на палубу корабля, оборудованного устройством «Веаr Тrар», производится следующим образом: вертолет зависает над ВПП корабля и вытравливает канат-проводник; один из членов палубной команды принимает его и крепит к концу притягивающего каната, который намотан на лебедку, установленную под ВПП. Канат-проводник выбирают на борт заземленными щипцами, снимающими заряд статического электричества. С помощью лебедки вертолета этот канат, а за ним и притягивающий выбирают и закрепляют на вертолете. Затем оператор, руководящий посадкой вертолета с пульта управления, с помощью лебедки выбирает притягивающий канат и подтягивает вертолет к Палубе корабля. Электронный чувствительный элемент, установленный на лебедке, обеспечивает постоянное натяжение каната силой 20 кН (2 т).

Рис. 78. Устройство «Вear Тrар» для посадки вертолета на палубу корабля при волнении:
а — транспортная тележка; б — конец притягивающего каната; в — каретка с фиксирующим устройством; г — палубный ограничитель; д — энергетическая установка; е — лебедка; ж — пулы оператора; з — ангарный ограничитель.
Информируя о своих действиях летчика по двустороннему радиотелефону, руководитель посадки выжидает момент, когда палуба принимает горизонтальное положение, и производит на нее посадку вертолета. Как только вертолет коснется палубы, под действием пневматического привода срабатывают захваты в закрепляющем устройстве каретки, которые зажимают специальный выступ, имеющийся в нижней части фюзеляжа вертолета.
Опыт показал, что даже при штормовой погоде палуба корабля находится в горизонтальном положении достаточное время, чтобы произвести безопасную посадку вертолета.
Для проведения работ по техническому обслуживанию вертолета на многих кораблях и судах снабжения сооружаются корабельные ангары.
Оригинальную конструкцию корабельного ангара для вертолетов разработала канадская фирма Dominion Aluminum Fabrication. Этот ангар представляет собой помещение телескопического типа, секции которого при приеме вертолета раздвигаются по длине. К палубе жестко крепится только одна секция, а остальные могут передвигаться (как вручную, так и от электропривода) по направляющим вдоль корабля.
Внутри ангара для удобства работы по обслуживанию вертолета предусмотрено отопление, освещение и вентиляция. Кроме того, на случай штормовой погоды предусмотрено надежное уплотнение между палубой и подвижными секциями ангара, что защищает его от попадания морской воды.
Размеры каждой секции обычно следующие: ширина 9,24 м, высота 5,23 м и длина 3 м. В зависимости от количества подвижных секций длина ангара может быть различной.
Вертолет передвигается с ВПП в ангар с помощью специальной роликовой каретки, которая движется вдоль канавки, проходящей по средней линии ВПП и ангара. При помощи второго выступа (в хвостовой части фюзеляжа), входящего в канавку, вертолет удерживается в ДП корабля и палубной лебедкой
вводится в ангар. Перед этим лопасти несущих винтов вертолета складываются вдоль фюзеляжа.
Для посадки вертолета на корабль в ночное время разработана система освещения, а в помощь летчику для ориентации, особенно при плохой видимости, на вертолете установлен индикатор, который позволяет видеть показания приборов, отражающиеся на экране.
Устройство «Bear Тгар» дает возможность производить посадку вертолетов на корабли при бортовой и килевой качке с амплитудами соответственно 30 и 8°.
Используемые в настоящее время вертолеты для передачи грузов в море можно подразделить на четыре основные группы: 1) легкие одномоторные; 2) средние одномоторные с газотурбинными двигателями; 3) двухмоторные; 4) вертолеты-краны.
В первую группу входят вертолеты с поршневыми или газотурбинными двигателями, способные перевозить груз массой до 1 т.
Вторая группа включает средние вертолеты с газотурбинными двигателями, способные перевозить на внешней подвеске груз массой до 2,5 т. Они нашли широкое применение при обслуживании морских платформ с установками для бурения скважин в открытом море, так как оказались наиболее рентабельными при эксплуатации, чем мощные двухмоторные.
Двухмоторные, тяжелые вертолеты, входящие в третью группу, могут перевозить груз массой более 2,5 т. Эти вертолеты имеют ряд преимуществ по сравнению с одномоторными, в частности, могут совершать полеты как в дневное, так и в ночное время при любом состоянии моря и длительное время зависать над судами, не опасаясь вынужденных посадок, вызванных выходом двигателя из строя.
Четвертая группа представляет собой вертолеты-краны. Это новые типы вертолетов, предназначенные для передачи тяжелых грузов. Они способны выполнять грузовые операции в портах, не оборудованных грузовыми устройствами, или когда условия приливов не позволяют использовать существующее портовое оборудование.
§ 33. Безударная передача грузов вертолетами
Представляют интерес следующие способы мягкой посадки грузов на палубу корабля при штормовой погоде:
— с помощью вертолета, соединенного тяговым канатом с палубой принимающего корабля;
— с помощью вертолета, соединенного швартовными канатами с передающим и принимающим кораблями.
Эти способы открывают возможность проведения грузовых операций в открытом море на ходу независимо от состояния погоды.
В первом случае вертолет оборудован лебедкой постоянного натяжения и в момент передачи груза соединяется тяговым канатом с принимающим кораблем.
Передача груза происходит следующим образом. Вертолет (рис. 79) с грузом зависает над палубой принимающего корабля. Спущенный с него конец тягового каната через канифас-блок заводится на барабан корабельной лебедки, при работе которой наматывается тяговый канат и выбирается грузовой (с лебедки постоянного натяжения). При этом груз приближается к палубе корабля, а вертолет сохраняет постоянную высоту зависания.
Как только транспортная тележка коснется колесами палубы, вертолет стравливает грузовой канат и соединительная скоба освобождается от поддерживающих канатов. После этого вертолет идет в следующий рейс за очередной партией груза. Качка и рыскание принимающего корабля в процессе проведения грузовых операций компенсируются вертолетом, а рывки воспринимаются лебедкой постоянного натяжения.
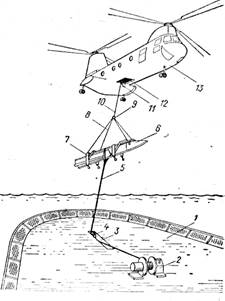
Рис. 79. Схема безударной передачи груза с помощью вертолета, соединенного тяговым тросом с палубой принимающего корабля.
1 — принимающий корабль; 2 — корабельная лебедка; 3 — углубление в палубе корабля; 4 — канифас-блок; 5 — тяговый канат; 6 — передаваемый груз; 7 — транспортная тележка; 8 — поддерживающие канаты; 9 — соединительная скоба; 10 — грузовой канат; 11 — лебедка постоянного натяжения; 12 — люк; 13 — вертолет.
При другом способе передачи грузов с целью повышения безопасности в работе и обеспечения мягкой посадки груза на палубу, в трюм или в шахту корабля при качке, а также для возможности передачи жидких грузов вертолет соединяется с судном снабжения и принимающим кораблем на весь период проведения перегрузочной операции швартовными канатами, свободные концы которых наматываются на барабаны лебедок, установленных на кораблях. Вертолет вместе с подвешенным к нему грузом передвигается от судна снабжения к принимающему кораблю и обратно с одновременным травлением и выбиранием соответствующих швартовных концов.
При этом вертолет развивает на грузовом гаке усилие, превышающее массу передаваемого груза, и держит свою скорость, равную скорости хода кораблей, практически не изменяя высоты полета.
Такая взаимосвязь вертолета с обоими кораблями, идущими параллельными курсами с одинаковой скоростью, соблюдая установленное траверзное расстояние, исключающее гидродинамическое взаимодействие кораблей, позволяет обеспечить мягкую, -безопасную посадку груза на их палубу, в трюм или в шахту.
Для обеспечения перегрузочных операций, выполняемых вертолетом, созданы специальные устройства, к которым относятся колесные грузовые тележки, специальные стропы и гаки, тележки, для транспортировки ракет.
§ 34. Вертолетный способ обработки грузовых судов
Американская судоходная компания American Export Istbrandtsen Lines Inc совместно с фирмой Sikorsky предложили обработку контейнеровозов производить способом судно — вертолет — склад или судно — вертолет — вагон. Указанный способ; предполагает использование вертолетов-кранов для разгрузки судов, стоящих на рейде в нескольких милях от берега. Грузы, заключенные в контейнеры, переносятся из трюма судна непосредственно на склад, охраняемую береговую площадку или непосредственно на железнодорожную платформу (или автофургон). В качестве вертолета-крана используется вертолет типа SH-64B, который применяется для транспортировки тяжелой техники (в ВМС) массой до 12 т. Вертолет зависает над палубой на предельно малой высоте, что позволяет до минимума снизить длину внешней подвески и предотвратить раскачивание груза; при полете и зависании на месте разгрузки.
Опыт показывает, что эскадрилья из четырех вертолетов способна обработать контейнеровоз, вмещающий до 576 стандартных контейнеров (размерами 6,1 X 2,44 X 2,44 м) за 1,5 сут, причем судно разгружается двумя вертолетами, в то время как третий находится в готовности, а четвертый под заправкой или на техосмотре. При нахождении судна на расстоянии 5 миль от берега цикл одной операции (застропка контейнера, перелет к берегу, отстройка, перелет к судну и зависание над ним) составляет 7,5 мин. Таким образом, в течение 1 ч вертолет может обработать восемь контейнеров.
При дальних рейсах, например, из Сан-Франциско в Сайгон, вертолетный способ обработки судов дает большую экономию во времени. Так, обычное сухогрузное судно затрачивает на этот рейс 57,5 сут, из которых 16,5 сут уходит на переход морем со скоростью 17 уз, 5 — на погрузку в порту, 15 — на ожидание свободного причала, 7 — на разгрузку и 14 — на доставку грузов из порта на базу хранения.
На тот же рейс контейнеровоз в комплексе с вертолетами затрачивает 19,5 сут, из них 16,5 сут — на переход морем, 1,5 сут — на погрузку контейнеров в порту и 1,5 сут — на разгрузку судна с помощью вертолетов непосредственно на базу.
Таким образом, кроме экономического эффекта вертолетный способ обработки судов позволит избежать затрат времени на ожидание свободных причалов и повысит эффективность использования наземного транспорта при обработке судна по схеме судно — вертолет — вагон или судно — вертолет — автофургон.
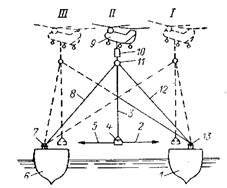
Рис. 80. Последовательные положения вертолета при передаче сухого груза.
1,6 — суда, участвующие в операции; 2,5 — оттяжки; 3 — грузовой канат; 4 — груз; 7,13 — лебедки; 8, 12 — швартовные канаты; 9— вертолет;10 — амортизатор; 11 — соединительная скоба; I — зависание вертолета над судном снабжения и взятие с него груза; II — промежуточное положение вертолета и передаваемого груза; III — зависание вертолета над принимающим кораблем и опускание груза на его палубу.
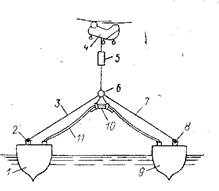
Рис. 81. Схема передачи жидкого груза.
1,9 — суда, участвующие в операции; 2, 8 — лебедки; 3, 7 — швартовные канаты; 4 — вертолет; 5 — амортизатор; в — соединительная скоба; 10 — коромысло; 11 — шланг.
На рис. 80 показаны последовательные положения вертолета при передаче сухого груза.
На рис. 81 показана схема положения вертолета и подвешенного к нему шланга при передаче жидких грузов. В этом случае вместо грузовой люльки к вертолету подвешивается коромысло с прикрепленным к нему шлангом, регулирование которого по длине и величине натяжения производится при помощи швартовных канатов 3, 7 и лебедок 2, 8.
Условия работы вертолета при передаче грузов вертолетным способом аналогичны условиям его работы при травлении мин и буксировке судов, Во всех этих случаях вертолет испытывает действие на него вертикальных и горизонтальных сил, а также порывов ветра, что, однако, не мешает проведению операции.
Учитывая, что более 90% береговой линии Мирового океана представляет собой необорудованный берег, находящийся вне сферы действия вертолетов, базирующихся на порты, успешное применение предложенного способа для обработки судов во многих районах мира возможно лишь при условии наличия судовых вертолетов, которые могут быть использованы в любой точке побережья.
§ 35. Выводы
Вертолет завоевывает все более прочное место в системе •снабжения судов и кораблей, существенно расширяя возможности обеспечения кораблей в открытом море и позволяя внедрять новый, более эффективный способ передачи грузов. При этом достигается экономия времени, создается возможность сохранения высокой боеготовности и свободы маневрирования при передаче грузов с судна снабжения на боевой корабль. Кроме того, отпадает необходимость выхода корабля из ордера для подхода к судну снабжения, последующего возвращения на прежнее место, а также монтажа и демонтажа различных передающих устройств.
Передача грузов с судна снабжения на корабль вертолетным способом производится при любом расстоянии, начиная от пришвартованного положения до 200 км между ними.
Различные виды передаваемого вертолетом груза (боеприпасы и ракеты) диктуют необходимость разработки устройств, способных обеспечить их сохранность (складные контейнеры, тележки -с амортизаторами, автопогрузчики и т. д.).
Особый интерес представляет возможность вертолетного способа передачи с мягкой посадкой груза на палубу корабля при волнении.
Вертолетный способ передачи грузов в открытом море продолжает совершенствоваться и в сравнении со способом передачи канатной дорогой имеет следующие преимущества:
— отсутствуют сложные устройства и механизмы;
— уменьшается вероятность потерь передаваемых грузов;
— обеспечивается передача грузов в более сохранном состоянии;
— обеспечивается возможность передачи грузов на маневрирующие корабли, что снижает степень их уязвимости от воздействия сил противника;
— осуществляется снабжение кораблей на значительном расстоянии;
— не требуется время для развертывания канатных устройств. Ограничивающими факторами вертолетного способа передачи
груза являются:
— необходимость наличия на судах снабжения ВПП и ангаров;
— недостаточный бортовой запас топлива на вертолете (на 2 ч полета);
— ограниченная площадь открытой палубы на кораблях для приема грузов;
— снижение грузоподъемности при повышении влажности и температуры воздуха;
— расположение ВПП в корме, что затрудняет доставку к ним грузов из трюмов и хранилищ.
При наличии на всех судах снабжения ВПП вертолетный способ может стать основным способом передачи грузов на корабли в море. Именно этим объясняется повышенный интерес в иностранных флотах к способу передачи грузов на боевые корабли с помощью грузовых вертолетов.
Дальнейшее развитие этого способа идет по пути создания вертолетов повышенной грузоподъемности, разработки погрузочно-разгрузочных средств и оборудования на боевых кораблях ВПП.
По мнению зарубежных специалистов, вертолетный способ является перспективным для обработки грузовых судов (особенно контейнерных), стоящих на рейде в нескольких милях от берега. Внедрение такой обработки судов значительно увеличит провозную способность флота без каких-либо мероприятий, связанных с реконструкцией портов.
Глава VI
СПУСКО-ПОДЪЕМНЫЕ СИСТЕМЫ И УСТРОЙСТВА ДЛЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ
§ 36. Общие положения
Океаны и моря занимают 360 млн. км2, т. е. 71% общей поверхности земного шара. Десятая часть этой поверхности представляет собой затопленные берега материков (береговой шельф) с глубинами менее 300 м. На этих глубинах, по оценке специалистов, геологические запасы нефти составляют примерно 420 млрд. т (в целом в Мировом океане — 1410 млрд. т, т. е. в несколько раз больше, чем на суше). На морских побережьях добывают золото, платину, алмазы и многие ценные минералы. Уже сейчас океан является источником питательных веществ и минерального сырья. Поэтому в последние годы за рубежом значительно возрос интерес к разработке проблем глубинного погружения. Помимо военных и стратегических аспектов этой проблемы она может открыть широкие возможности для различных отраслей промышленности, связанных с изучением сырьевых источников и океанографии.
Глубоководные аппараты (ГА) перестали быть только экспериментальными единичными средствами, предназначенными для научных исследований. Сейчас имеется большое количество рабочих аппаратов, используемых как в гражданских, так и в военных целях.
Одним из основных элементов, благодаря которому оказывается возможной успешная работа ГА, а также станций и других технических средств, является комплекс спуско-подъемного оборудования, устанавливаемого на обеспечивающем судне.
Необходимо заметить, что уровень разработок этого оборудования в настоящее время существенно ниже уровня развития собственно глубоководной техники, что объясняется сравнительно малым вниманием, которое уделялось до сих пор вопросам проектирования и постройки спуско-подъемных устройств и оснащения ими обеспечивающих судов. Следствием этого является то, что многие из судов, в особенности старой постройки, оснащены такими устройствами для спуска и подъема, которые допускают работу только в условиях тихой воды и малого волнения моря.
Эффективность использования глубоководной техники существенно возрастает при возможности использования ее в условиях волнения. Этим обстоятельством и объясняются в основном предпринимаемые сейчас попытки совершенствования способов и устройств для спуска и подъема глубоководных аппаратов, которые допускали бы возможность работы при наличии волнения.
Некоторые успехи в этом направлении в настоящее время уже достигнуты. В частности, появились гаки с автоматическим закрытием и открытием, успокоители качки судна, средства, устраняющие раскачивание аппаратов на грузовом канате, средства захвата аппарата за рым под водой, способы бескранового осуществления спуско-подъемных операций и т. д.
Перечисленные средства и устройства в значительной мере способствуют выполнению следующих требований, предъявляемых к спуско-подъемному оборудованию ГА:
— возможность автоматического соединения рыма ГА с гаком устройства;
— опускание ГА точно в заданное место;
— мягкая посадка ГА на воду и палубу обеспечивающего судна;
— плавный отрыв ГА от воды и палубы обеспечивающего судна;
— простота обслуживания и эксплуатации.
При работе со спуско-подъемными устройствами должны быть исключены раскачивание аппарата на гаке устройства и вероятность повреждения ГА от ударов о борт обеспечивающего судна.
Таким образом, большая часть требований сводится к достижению возможности работы спуско-подъемного оборудования в условиях волнения.
Устройства для спуска и подъема ГА и лабораторий в открытом море представляют собой сложные системы. Конструкции этих систем пока еще находятся в стадии разработок и экспериментальных проверок, поэтому можно считать, что проблема спуско-подъемных работ ГА при волнении окончательно еще не решена.
Многие из находящихся сейчас в эксплуатации спуско-подъемных механизмов и устройств рассчитаны на работу при высоте волны до 1,5 м, в то время как работать с аппаратами часто приходится при высоте волн от 2,4 до 3,7 м. Проведение операций по спуску и подъему ГА при таком волнении средствами, рассчитанными на условия менее жесткого волнения, не гарантирует безопасности как для самого ГА, так и для его экипажа.
По этой причине представляется целесообразным в первую очередь оценить степень влияния волнения на проведение спуско-подъемных работ, с тем чтобы в последующем попытаться оценить те конструктивные решения, которые разрабатываются проектантами спуско-подъемного оборудования.
При проектировании и создании новых систем разработчикам спуско-подъемных устройств и механизмов для ГА необходимо учитывать взаимодействие между обеспечивающим судном и самим ГА. При этом особенно важно точно определить значения относительных перемещений судна и ГА, а также величины динамических нагрузок на спуско-подъемные механизмы и грузовой канат, возникающие вследствие инерционных сил, вызванных качкой.
Операция по спуско-подъемным работам ГА состоит из двух этапов:
1) спуск (подъем) ГА с палубы (на палубу) на поверхность-(с поверхности) воды;
2) погружение (подъем) ГА с поверхности воды на глубину (к поверхности воды).
Для первого этапа характерен ряд опасных моментов. Один из них состоит в том, что на подвешенный на гаке аппарат влияют движение подвеса грузового каната, а также силы, вызванные качкой обеспечивающего судна, собственными колебаниями аппарата и ветровым воздействием. Наличием этих сил объясняется динамичность действующих на грузовой канат нагрузок.
Другим опасным моментом является момент собственно опускания аппарата на воду. Опасность заключается в непосредственной близости аппарата к борту судна, следствием чего может явиться повреждение аппарата при ударах о борт. Опасность усугубляется наличием у аппарата выступающих частей, имеющих хрупкую конструкцию, и большим количеством океанографических приборов.
Опыт показывает, что основной проблемой, возникающей на первом этапе спуска (подъема) ГА, является достижение синхронизации движения аппарата относительно поверхности воды
(граница раздела воздух — море). Если эти движения не согласованы по фазе и амплитуде, то возникают удары волны о корпус ГА, что вызывает повышенные нагрузки на бортовые приборы.
При спуске ГА, когда он приближается к поверхности воды, возникает контакт ГА с волной при ее подъеме и нарушение этого контакта с уходом волны. Это может повторяться несколько раз, прежде чем ГА опустится достаточно, чтобы остаться В постоянном контакте с волной при ее перемещении.
Наиболее сложным является подъем ГА с поверхности воды, когда возникают наибольшие динамические нагрузки на канат, обусловленные качкой аппарата и обеспечивающего судна. Эти нагрузки в момент отрыва ГА от воды могут в несколько раз превосходить его массу.
Некоторые зарубежные специалисты считают, что при подъеме ГА целесообразно как можно быстрее «выхватить» его из воды, опередив этим удары волны о корпус аппарата. Но такой способ пригоден только для легких ГА, в других случаях потребуются чрезмерные мощности спуско-подъемных устройств. Другой способ подъема ГА основан на использовании обгонной муфты, которая выбирает канат с большой скоростью при малой нагрузке (подъем волны) и с малой скоростью при большой нагрузке (спад волны).
В отечественной практике применяют два способа подъема: с «подхватом» и с «виса».
Первый способ заключается в том, что за время подъема на волне застропленного на гак ГА и выборки образующейся при этом слабины каната двигатель механизма подъема разгоняется до максимальной скорости и в момент начала спада волны (начало опускания груза на волне) происходит подхват аппарата на подъем. При этом возникают большие дополнительные усилия, обусловленные динамикой рывка, которые могут достигнуть значений разрывного усилия каната.
При работе способом с «виса» к моменту начала подъема ГА необходимо предварительное нагружение каната, а значит, и отсутствие слабины в нем. Подъем начинается в момент нахождения ГА на вершине волны. Максимальное дополнительное усилие, обусловленное динамикой разгона, в этом случае меньше, чем в первом. Следовательно, способ подъема с «виса» более предпочтителен, чем с «подхватом». Однако для этого необходимо наличие механизмов, обеспечивающих слежение за скоростью груза, и предварительное натяжение грузовых канатов.
Дата добавления: 2020-08-31; просмотров: 658;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
