Принимающее судно; 2 - передающее судно; 3 - кранцы; 4 — креплениекранцев. 7 глава
Второй этап спуска и подъема является менее опасным. Тем не менее для каждого из двух названных этапов необходимо знать характеристики качки обеспечивающего судна и ГА на волнении.
Следует заметить, что влияние различных видов качки на работу спуско-подъемных устройств не равнозначно. На первом этапе наиболее существенное влияние на операции спуска и подъема оказывают, согласно опыту эксплуатации, бортовая, килевая и вертикальная каяки обеспечивающего судна. При этом при размещении устройства в кормовой части судна доминирующей оказывается килевая качка, а при размещении его в средней части — бортовая и вертикальная качки.
Значения амплитуд вертикальной качки в зависимости от состояния моря для некоторых типов обеспечивающих судов и ГА представлены на рис. 82. Указанные графики построены на основании рассмотрения вертикальной качки этих судов (рис. 83).
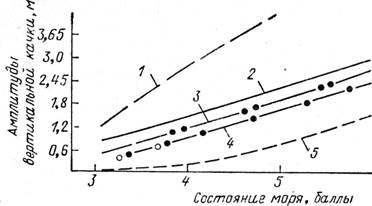
Рис. 82. Графики амплитуд вертикальной качки.
1 — судна снабжения; 2 — судна катамаранного типа; 3 — быстроходного транспорта; 4 — десантного транспортного дока; 5 — глубоководного аппарата.
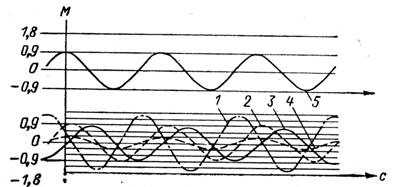
Рис. 83. Графики относительных колебаний обеспечивающих судов и ГА на волнении в 5 баллов.
1— судно катамаранного типа; 2 — быстроходный транспорт; 3 — десантный транспорт-док; 4 — ГА; 5 — волнение моря.
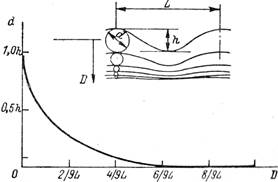
Рис. 84. Перемещение волновой частицы жидкости в зависимости от глубины.
L — длина волны; h— высота волны; d— диаметр орбиты волновой частицы; D — глубина.
Из рис. 82 и 83 видно, что по амплитудам вертикальной качки имеется весьма существенное различие между обеспечивающими судами и ГА. Аналогичное различие наблюдается между ними и по фазам колебаний, что объясняется, в частности, большей возможностью к перемещениям по орбитальным траекториям движения волновых частиц жидкости у ГА, находящихся на поверхности моря.
При погружении аппарата влияние волнения существенно снижается, что видно из рис. 84, и при глубине, составляющей 2/3 длины волны, диаметр орбит волновых частиц, а следовательно, и действующие на аппарат гидродинамические силы практически стремятся к нулю. В отсутствии воздействия на ГА сил и состоит основное отличие второго этапа спуска и подъема аппаратов от первого.
§ 37. Классификация и краткое описание спуско-подъемных устройств
В зависимости от назначения и массогабаритных характеристик ГА и конструкций спуско-подъемные устройства могут быть подразделены на следующие категории:
1) палубные краны;
2) судовые канатные элеваторы;
3) специализированные устройства;
4) устройства автоматического слежения.
Первая из этих категорий наиболее универсальна, поскольку палубные краны могут использоваться для спуско-подъемных операций ГА любого назначения, любых масс и габаритов. Эта категория объединяет палубные краны различных конструкций, среди которых наибольшего внимания заслуживают: шарнирно-сочлененные гидравлические краны, краны с пневматическими амортизаторами, краны со вспомогательной стрелой.
Судовые элеваторы, как правило, предназначаются для спуска и подъема глубоководных аппаратов значительной массы (до 50 т) и используются большей частью на обеспечивающих судах катамаранного типа.
Специализированные устройства рассчитываются на спуск и подъем какого-либо конкретного оборудования, например, подводной лаборатории SELAB III, водолазных систем, необитаемых аппаратов.
К четвертой категории относятся устройства, обеспечивающие безопасность работы на палубных кранах и элеваторах, например, устройства постоянного натяжения грузового каната, компенсации динамических нагрузок и т. д.
Ниже приводится краткое описание конструкций и способов работы перечисленных устройств.
Палубные краны
Шарнирно-сочлененные гидравлические краны. В последнее время на океанографических и обеспечивающих судах получили распространение шарнирно-сочлененные гидравлические краны. Стрела такого крана состоит из секций с самостоятельными гидравлическими приводами и заканчивается грузовым канатом предельно малой длины. Это позволяет спускать ГА на воду с минимальным раскачиванием, поскольку указанные стрелы могут своим ноком касаться поверхности воды.
Для удобства и безопасности при работе на этих кранах вместо открытого гака применяется вертолетный с дистанционным управлением, который можно раскрывать с палубы судна при спуске аппарата. При подъеме аппарата из воды гак фиксируется в открытом положении и заводится в подъемный рым, хотя для этой операции необходим водолаз, проведение ее все же значительно упростилось и стало безопаснее.
Гак крана висит на грузовом шкентеле и соединен с гидравлическим цилиндром, встроенным в нок стрелы. Такое устройство обеспечивает дополнительный зазор между аппаратом и гаком в момент их соединения, а следовательно, и большую безопасность работы.
Палубный кран с пневматическим амортизатором. Такой кран (рис. 85) в отличие от обычных кранов снабжен системой амортизации грузового каната, состоящей из пневмоцилиндра, подвижных и неподвижных блоков полиспаста и аккумулятора-баллона со сжатым воздухом.
Возникающие при спуске и подъеме динамические рывки при вертикальных перемещениях на волнении застропленного на гаке ГА поглощаются амортизационной системой, что создает условия безударной посадки аппарата на воду и плавного съема его с поверхности воды.
После застройки аппарата на гаке грузовой лебедкой выбирается слабина каната, с, появлением натяжения которого включается система амортизации.
При опускании аппарата на подошву волны нагрузка па гаке резко возрастает. Под влиянием этой нагрузки поршень из нижнего положения перемещается канатом через подвижные блоки полиспаста по цилиндру, сжимая в нем воздух, который и амортизирует динамические рывки. Избыточное давление при этом стравливается через перепускной клапан.
При подъеме аппарата на гребень волны натяжение в грузовом канате ослабевает и образуемая в нем слабина выбирается полиспастом путем перемещения под действием давления воздуха поршня в цилиндре в нижнее положение.
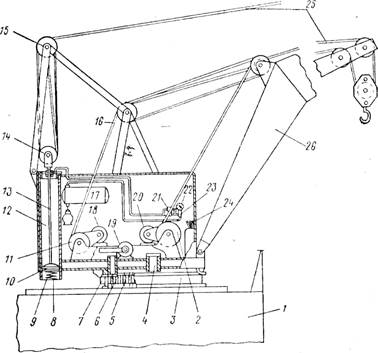
Рис. 85. Палубный кран с пневматическим амортизатором.1 — обеспечивающее судно;2 — барабан грузовой лебедки; 3 — неподвижное основание;4 -ось поворота;5 — зубчатый погон;в — шестерня;7 — подхват;8 — стакан пружины;9 — пружина;10 — поршень;11 — барабан лебедки топенанта;12 — цилиндр;13 — шток;14 — блок подвижный;15 — блок неподвижный;16 — топенант;17 — воздушный баллон;18 — электродвигатель лебедки топенанта;19 — электродвигатель лебедки поворота;20 — электродвигатель лебедки грузовой;21 — клапан перепускной;22 — манометр;23 — клапан автоматический;24 — контроллер;25 — шкентель грузовой;26 — стрела крана.
Подъем аппарата производится грузовой лебедкой с электроприводом. Поворот крана в горизонтальной плоскости осуществляется механизмом поворота, а изменение вылета и угла наклона стрелы крана — топенантом с помощью лебедки.
Палубный кран со вспомогательной стрелой. Такой кран (рис. 86) представляет собой полноповоротный подъемный кран с грузовой стрелой-фермой, снабженной вспомогательной стрелой для отвода грузового шкентеля и автоматическим приводом —- компенсатором динамических рывков.
Шпор грузовой стрелы-фермы закреплен на поворотной раме на одном валу с грузовой автоматической лебедкой, а вспомогательная стрела — на грузовой стреле на одной оси с блоком грузового каната.
Изменение угла наклона и вылета грузовой стрелы производится топенантной лебедкой, установленной на поворотной раме, а вспомогательной стрелы — топенантной лебедкой, установленной на грузовой стреле.
Топенант грузовой стрелы коренным концом закреплен на поворотной раме, а ходовой конец его, пройдя через блок топенанта на грузовой стреле, навит на барабан топенантной лебедки.
Топенант вспомогательной стрелы коренным концом закреплен на ноке грузовой стрелы, а другой конец, пройдя .блок на ноке грузовой стрелы, навит на барабан топенантной лебедки вспомогательной стрелы.
Грузовой шкентель коренным концом закреплен на барабане грузовой лебедки, а другой конец, пройдя блоки вспомогательной стрелы, крепится к гаку.
При подъеме аппарата с воды гак крепится к грузовому рыму и после этого выбирается слабина троса. Далее в зависимости от перемещения аппарата на волне грузовая лебедка-автомат либо стравливает, либо выбирает образовавшуюся слабину троса. Отрыв (съем) аппарата от поверхности воды осуществляется вспомогательной стрелой. Последующий подъем аппарата производится грузовой лебедкой.
Судовые канатные элеваторы
Элеваторы катамаранных судов. В настоящее время в США четыре обеспечивающих судна катамаранного типа специальной постройки оборудованы канатными элеваторами для спуска и подъема ГА.
Спуск и подъем ГА осуществляются с помощью элеватора, грузовая платформа которого подвешена на стальных канатах в шахте в средней части обеспечивающего судна. Для спуска и подъема платформы используются гидравлические лебедки; скорость наматывания канатов 3,1 м/мин.
Преимуществом такого спуско-подъемного устройства является размещение элеватора в средней части обеспечивающего судна, т. е. в районе наименьшего влияния качки. Недостаток такого расположения подъемника — необходимость применения значительного числа оттяжек, предназначенных для регулирования положения ГА относительно платформы элеватора во время спуско-подъемных операций при волнении.
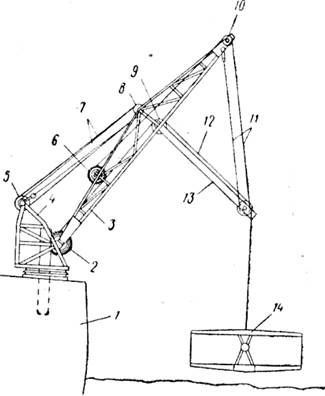
Рис.86. Палубный кран со вспомогательной стрелой.
I — обеспечивающее судно; 2 — лебедка грузовая; 8 — стрела грузовая; 4 — поворотная рама; 5, 8 — блоки топенанта грузовой стрелы; в — лебедка топенанта вспомогательной стрелы; 7 — топенант грузовой стрелы; 9 — канифас-блок; 10 — ноковый блок; 11 — топенант вспомогательной стрелы; 12 — шкентель грузовой; 13 — стрела вспомогательная; 14 — ГА.
Для быстрого и надежного обнаружения ГА платформы последняя оборудована акустическими датчиками, мощными прожекторами и рефлекторами — отражателями света, которые принимают и отражают световые потоки, излучаемые прожекторами ГА. Кроме этого, для обнаружения платформы используется бортовая телевизионная установка и иллюминаторы. Поиск платформы и вхождение в нее ГА наблюдается с борта обеспечивающего судна с помощью телевизионной установки замкнутого цикла. Нормальная работа спуско-подъемного устройства в целом обеспечивается при состоянии моря не выше 3 баллов.
Элеватор фирмы General Dynamics. Указанный элеватор (рис. 87) состоит из металлической конструкции, смонтированной на палубе обеспечивающего судна, грузовой тележки и плавучей платформы с системой противовесов.
Металлическая конструкция, собранная из профильного проката, установлена в кормовой части судна на четырех стойках, укрепленных на фундаментных плитах. Консольная часть конструкции, нависающая за корму судна и несущая на себе основные нагрузки, усилена дополнительным набором.
Грузовая тележка имеет катки, с помощью которых она может передвигаться вдоль направляющих, проложенных в верхней части металлической конструкции. Это движение тележки осуществляется электродвигателем, установленным на кронштейне, через зубчатую пару, состоящую из шестерни, насаженной на вал редуктора, и зубчатой рейки, неподвижно закрепленной на металлической конструкции. По углам тележки на кронштейнах смонтированы четыре лебедки с канатными барабанами, канаты которых проходят через отверстия в упорах и своими концами крепятся к плавучей платформе, предназначенной для приема ГА.
Система подвески противовесов обеспечивает платформе устойчивое положение и не допускает ее всплытия на поверхность воды. С помощью трособлочной системы противовесы могут устанавливаться на разном удалении от платформы или подтягиваться к ней и закрепляться зажимами.
Платформа подтягивается к зависшему над нею ГА и вместе с ним поднимается из воды, подтягивается к грузовой тележке и прижимается своими упорами к упорам тележки. Далее тележка транспортирует платформу с ГА на борт судна.
Навигационное оборудование и следящая система обеспечивают поднимаемой платформе с ГА устойчивое положение при волнении моря.
Специализированные устройства
Устройство с противовесом для спуска и подъема подводной лаборатории. Основным требованием нормальной работы подводной лаборатории является точный спуск ее в заданную точку О необходимой ориентацией независимо от состояния моря.
Лаборатория обладает большой инерционностью, в результате чего возникают значительные динамические нагрузки в грузовом канате, на котором она спускается, при наличии качки обеспечивающего судна. Для устранения этого в системе спуска и подъема лаборатории применен противовес, подвешиваемый под судном на грузовом канате между двумя точками подвеса.
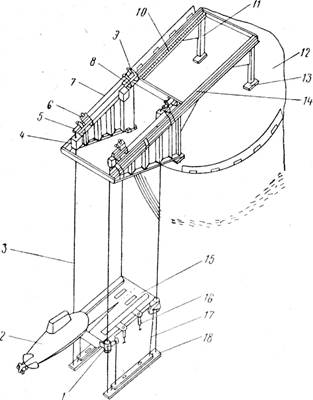
Рис. 87. Элеватор фирмы General Dynamics.
1 — упор платформы; 2 — ГА; 3 — грузовой канат; 4 — упор тележки; 5 — кронштейн; 6— лебедка; 7 — грузовая тележка; 8 — каток тележки; 9 — барабан; 10 — зубчатая рейка; 11 — стойка; 12 — обеспечивающее судно; 13 — фундаментная плита; 14 — направляющая; 15 — плавучая платформа; 16 — зажим; 17 — трособлочная система; 18 — система противовесов.
Как видно из рис. 88, устройство спуска и подъема такой лаборатории состоит из противовеса, страховочного троса, грузового каната, лебедки и двух канифас-блоков.
Грузовой канат от лебедки через канифас-блок, блок противовеса и другой канифас-блок идет к корпусу лаборатории, к которой и крепится с помощью скобы.
Во время работы устройства в динамическом режиме на волнении противовес под влиянием вертикальной качки судна благодаря малому его сопротивлению свободно движется в воде, в то время как лаборатория остается почти неподвижной.
Допуск на длину грузового каната задается в зависимости от величины размаха вертикальных колебаний судна и обеспечивается соответствующим размещением точек подвеса противовеса и величиной расстояния между этими точками.
Как правило, точки подвеса противовеса и лаборатории разносятся на возможно большее расстояние. Для этого при спуске противовеса с правого борта лабораторию спускают с левого и наоборот. Спуск противовеса и лаборатории с противоположных бортов судна вызывается также стремлением сохранить равновесие судна и избежать появления большого крена.
Для размещения лаборатории в точно заданном месте с заданной ориентацией при выполнении работ используются два направляющих каната. Концы этих канатов крепятся на дне к якорям, масса каждого из которых составляет около 2 т.
Проверка размещения якорей на дне моря осуществляется специальным шаблоном, который изготовлен из двутавровой балки. На шаблоне установлен угломер, с помощью которого по данным телекамеры определяется рельеф дна. По окончании установки якорей и проверки рельефа дна шаблон поднимается на судно, а лабораторию опускают по направляющим на дно. Способы и устройства для спуска и подъема лабораторий меняются в зависимости от глубины погружения.
Спуско-подъемное устройство рычажного типа. Конструкция этого устройства (рис. 89) включает в себя шарнирно-сочлененную грузовую стрелу с универсальным шарниром, движение которого контролируется гидравлическими тормозами авиационного типа. Это обеспечивает свободу движения, и оператор получает возможность контролировать направление движения аппарата. Грузовой шкентель имеет достаточную длину, так что соединять гак с аппаратом можно на достаточном расстоянии от нока грузовой стрелы. Это устройство устраняет раскачивание и успешно применялось для спуска и подъема аппарата «Deep Diver» и 6-тонной декомпрессионной камеры.
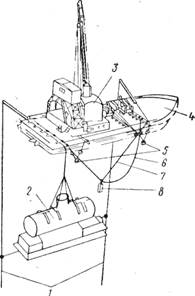
Рис. 88. Устройство с противовесом для спуска и подъема подводной лаборатории.
1 — направляющие; 2 — глубоководная лаборатория; 3 — палубный кран; 4 — обеспечивающее судно; 5 — противовесы направляющих канатов; 6 — страховочный трос; 7 — грузовой канат; 8 — противовес грузового каната.
На устройстве установлена лебедка постоянного Натяжения вспомогательного каната с карабином, с помощью которого он кропится на ГА. При работе лебедки постоянного натяжения ной стрелы и ГА сближаются. После того как байонетное соединение нока стрелы и ГА замкнется, производится подъем аппарата на обеспечивающее судно.
Устройства для спуска и подъема водолазных систем. Глубоководные водолазные системы представляют собой комплекс, в который входят палубная декомпрессионная камера, транспортировочная водолазная камера, спуско-подъемное устройство и пульт управления, — все это компактно смонтировано на одном основании.
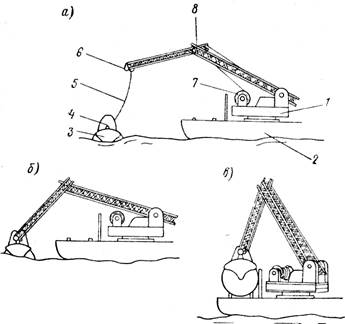
Рис. 89. Спуско-подъемное устройство рычажного типа: а — застройка ГА; б — начало подъема; в— конец подъема.
1 — поворотная платформа; 2 — обеспечивающее судно; 3 — глубоководный аппарат; 4 — байонетное соединение; 5 — вспомогательный трос; 6 — амортизатор гашения рывков при качке; 7 — лебедка постоянного натяжения вспомогательного каната; 8 — двуплечная стрела.
Погрузка и установка систем на суда производится береговыми подъемными средствами на заранее подготовленное место вблизи борта, а на специальных спасательных и обеспечивающих судах — на штатное место.
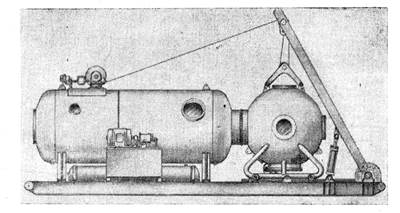
Рис. 90. Американская водолазная система.
При необходимости установки системы на буровую платформу, находящуюся в открытом море, используются подъемные краны судна, на котором транспортируется система, или буровой платформы.
Спуско-подъемное устройство для глубоководной транспортировочной водолазной камеры состоит из электрической или гидравлической лебедки, подвижной кран-балки или стрелы и пульта управления.
Современные водолазные системы, созданные в США, Франции и Англии и используемые в коммерческих целях, позволяют производить погружение водолазов в транспортировочных камерах с достаточной степенью безопасности на глубину до 183 м. Грузоподъемность лебедок рассчитывается таким образом, чтобы они обеспечили подъем камеры и в том случае, если последняя в результате аварии будет затоплена.
На больших водолазных системах типа Strong Work Diving (Англия), Mark II (США) (рис. 90) и Cristal (Франция) грузовые лебедки монтируются на общем основании, но в виде отдельного узла. На малых водолазных системах лебедки монтируются на верхней задней части палубных декомпрессионных камер.
Грузовые кран-балки водолазных систем имеют прямоугольную форму и крепятся в передней части основания, что позволяет вываливать их за борт и убирать обратно.
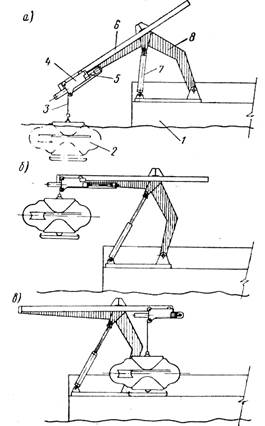
Рис. 91. Кормовое устройство для спуска и подъема ГА: а - застропка ГА; б — подъем; в — опускание ГА на палубу. 1 — обеспечивающее судно; 2 — ГА; 3 — грузовой канат; 4 — грузовая тележка; 5 — механизм тележки; в — монорельс; 7 — гидропривод подъема стрелы; 8 — металлическая конструкция со стрелой.
Наибольший интерес представляет палубная лебедка для спуска и подъема (на глубину до 257 м) у американской глубоководной водолазной системы Mark II.
Лебедка этой системы трехскоростная реверсивная, одно-барабанная с горизонтальным валом и гидроприводом, установленным на общем фундаменте. Управление лебедкой ручное и автоматическое, обеспечивающее заданное натяжение каната. После установки камеры на дно с нее отдается якорь, к которому прикреплен канат, идущий на бортовую лебедку. Под действием розданной положительной плавучести и использования бортовой лебедки камера всплывает на заданное углубление, при этом
палубная лебедка автоматически срабатывает и выбирает либо стравливает подъемный канат. В результате камера находится в толще воды между двумя натянутыми канатами. Грузоподъемность палубной лебедки рассчитана таким образом, чтобы она обеспечила подъем камеры с якорем, бортовой лебедкой и канатом.
Кормовое устройство для спуска и подъема ГА. Специально спроектированное устройство для обслуживания ГА имеет заваливающуюся металлическую конструкцию со стрелой, на которой в ДП судна расположен монорельс с грузовой тележкой. Последняя оборудована быстродействующим гидравлическим механизмом с подъемным канатом. Тележка перемещается по монорельсу с помощью зубчатого колеса и рейки, выступающей в нижней части монорельса (рис. 91).
Для подъема ГА с поверхности воды на палубу судна устройство опускается (вываливается) до положения, когда нок стрелы будет находиться вблизи поднимаемого объекта (рис. 91, а), причем грузовой канат вытравливается настолько, чтобы не произошло удара нока о ГА (величина вытравленного каната устанавливается в зависимости от волнения). На конце каната имеется автоматический гак с запирающимся механизмом, который в момент контакта с рымом ГА надежно запирается. Затем оператор приводит в действие механизм тележки с целью выборки слабины грузового каната. После этого включаются два гидропривода подъема стрелы, которая из наклонного положения приводится в горизонтальное (рис. 91, б). С помощью лебедки грузовая тележка с подвешенным к ней ГА передвигается по монорельсу и после вывешивания ГА над необходимым местом опускается на палубу судна (рис. 91, в). Спуск ГА на воду производится в обратном порядке.
Устройства автоматического слежения
Устройство постоянного натяжения грузового каната. Указанное устройство (рис. 92) включает в себя барабан грузовой лебедки, связанный зубчатой передачей с дифференциалом. Гидродвигатель 7 сопрягается с входным валом 4, а гидронасос 9 — с корпусом дифференциала. На выходном валу 6 свободно насажено зубчатое колесо, входящее в зацепление с колесом 2 с помощью муфты 5, которая приводится в действие поршневым механизмом 8, работающим от гидросистемы. В гидросистеме имеются магистрали высокого давления (показана жирной линией) и низкого давления (показана тонкой линией).
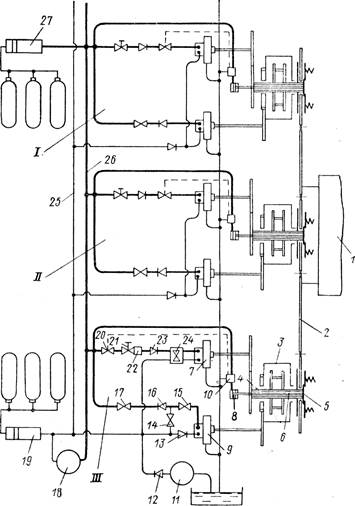
Рис. 92. Устройство постоянного натяжения грузового каната.
1 — барабан; г — зубчатое колесо; 3 — дифференциальная передача; 4 — входной вал; 5 — муфта; в — выходной вал; 7 — гидродвигатель; 8 — поршневой механизм; 9 — гидронасос; 10 — клапан двухходовой; 11 — питательный насос; 12, 13, 1в, 23 — невозвратные клапаны; 14, 17 — предохранительные клапаны; 15 — запорный клапан; 18 — компенсирующий насос; 19 — гидроаккумулятор низкого давления; so — запорный клапан; 21 — клапан регулирования; 22 — клапан давления; 24 — клапан реверсивный; 25 — трубопровод низкого давления; 26 — трубопровод высокого давления; 27 — гидроаккумулятор высокого давления.
Гидроаккумулятор низкого давления питает насосы по трубопроводу 25 через невозвратные клапаны 13. Насосы подают жидкость высокого давления через невозвратные клапаны 16 и предохранительные клапаны 17 в магистраль высокого давления. По трубопроводу 26 через невозвратные клапаны 23 жидкость поступает к гидродвигателям 7.
Магистраль высокого давления, кроме того, обеспечивает подачу жидкости к поршневому механизму 8 через двухходовые клапаны 10, которые управляют сцеплением или расцеплением муфт 5. Клапаны приводятся в действие индивидуально, смотря по обстоятельствам, при одном положении клапанов жидкость проходит к поршневому механизму 8, в результате чего муфта 5, преодолевая сопротивления пружин, расцепляется. При другом положении клапанов жидкость направляется в сливную цистерну, в результате чего муфта 5 под действием пружин сцепляется.
Клапан 10 механически соединен с запорным клапаном 20, установленным между гидроаккумулятором 27 и гидродвигателем 7, благодаря чему при разъединении муфты клапан 20 перекрывается.
Рабочая жидкость из гидродвигателей 7 подается вновь в трубопровод низкого давления, а утечки отводятся в сливную цистерну, откуда они насосом 11 через невозвратный клапан 12 возвращаются в магистраль низкого давления. Между трубопроводами низкого и высокого давления установлен насос 18, который компенсирует утечки жидкости.
Гидродвигатель 7 работает с постоянной скоростью в одном направлении, сообщая постоянную мощность дифференциальной передаче 3 при ее сцеплении с муфтой, а также заданный крутящий момент барабану 1 на выбирание каната.
Известно, что основным требованием нормальной работы с ГА является точность спуска его на заданную глубину погружения с необходимой ориентацией независимо от состояния моря. Для этого в устройстве используется как направляющий ГА грузовой канат, один конец которого крепится на дне к якорю, а другой наматывается на барабан устройства постоянного натяжения. Изменение расстояния между якорем и точкой подвеса каната на судне обеспечения приводит к необходимости соответственно выбирать или травить канат (аналогично тому, как это делается в канатных дорогах).
В случае уменьшения расстояния появившуюся слабину в канате выбирает барабан с помощью гидродвигателей 7. В другом случае, когда расстояние увеличивается и под действием внешней силы натяжение каната возрастает, барабан начнет вращаться в режиме травления каната. Движение барабана через корпус дифференциала передается насосам 9, которые начнут подавать рабочую жидкость в магистраль высокого давления гидросистемы (происходит зарядка аккумулятора).
Как показано на рис. 92, гидросистема состоит из нескольких приводов (в данном случае из трех — I, II, III). Однако в работе может быть использован только один из них (III), который имеет добавочные клапаны для настройки системы. Два других привода (I, II) могут включаться в параллельную работу по необходимости, что может быть вызвано увеличением глубины погружения (а значит, увеличением массы каната) или повышением натяжения каната.
Устройство регулирования натяжения грузового каната. Данное устройство предназначено для амортизации груза, подвешенного на грузовом канате. Оно сохраняет постоянную глубину
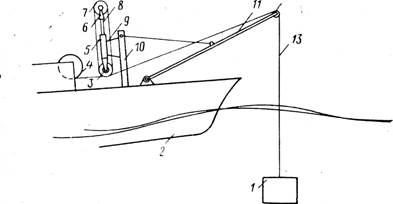
Рис. 93. Схема устройства регулирования натяжения грузового каната.
1— груз; 2— обеспечивающее судно; 3— неподвижные блоки; 4— барабан грузовой лебедки; 5 — цилиндр амортизатора; в — вильчатая насадка; 7— подвижные блоки; 8— шток; 9— кронштейн; 10— полумачта; 11—стрела; 12— ноковый блок; 13—грузовой канат.
погружения ГА, подвешенного к колеблющемуся судну во время качки.
Как следует из схемы (рис. 93), устройство включает в себя пневматический амортизатор, нижний блок которого установлен неподвижно на цилиндре, а верхний блок подвижный, поскольку он смонтирован на подвижном поршневом штоке.
Под поршнем амортизатора создается давление, благодаря которому подвижный блок, расположенный на конце штока, удерживается в среднем положении цилиндра и не двигается под действием номинального усилия, создаваемого под поршнем подвешенным на гаке грузом при отсутствии качки.
Для демпфирования колебаний поршня при его отклонении от среднего положения предусмотрена пневматическая демпфирующая система.
Устройство (рис. 94) включает швеллер с верхним, средним и Нижним кронштейнами, с помощью которых он крепится к мачте судна. К среднему кронштейну крепится верхний конец цилиндра амортизатора. Другой, закрытый конец цилиндра крепится к нижнему кронштейну, в котором монтируется неподвижный канатный блок. Внутри цилиндра находится поршень, шток
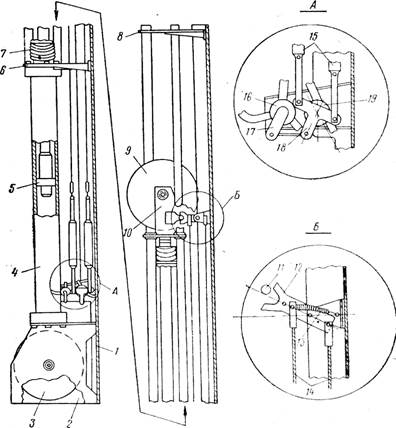
Рис. 94. Амортизатор колебаний.
1 — швеллер; 2 — нижний кронштейн; 3 — неподвижный блок; 4 — цилиндр; 5 — поршень со штоком; в — средний кронштейн; 7 — гофрированный кожух; 8 — верхний кронштейн; 9 — подвижный блок; 10 — вильчатая насадка; 11 — ролик насадки; 12 — верхний рычаг; 13 — пружина; 14 — тросы рычагов; 15 — пружинные демпферы; 16 — двухпозициоиный клапан; 17 — рычаг; 18 — трехплечий рычаг; 19 — клапан регулирования давления; А — узел клапанов; Б — узел верхнего рычага.
которого выступает наружу из верхней части цилиндра. На конце поршневого штока имеется вильчатая насадка для подвижного блока.
Для предотвращения попадания посторонних предметов через открытый верхний конец цилиндра установлен эластичный гофрированный кожух, нижний конец которого крепится к верхнему концу цилиндра, а верхний конец к поршневому штоку.
Дата добавления: 2020-08-31; просмотров: 676;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
