Принимающее судно; 2 - передающее судно; 3 - кранцы; 4 — креплениекранцев. 8 глава
На нижнем конце цилиндра амортизатора установлены два двухпозиционных клапана, соединенные между собой с помощью рычагов и тяги.
К рычагу клапана 19 крепятся концы двух тросов 14, другие концы которых крепятся к рычагу с выемкой 12. Место установки рычага с выемкой строго определено. Когда поршень амортизатора находится в среднем положении, ролик 11 насадки 10 должен располагаться в выемке рычага. При этом клапаны 16 и 19 будут находиться в нейтральном положении.
Когда поршень амортизатора пойдет вверх, ролик насадки повернет рычаг 12 по часовой стрелке и с помощью канатов выведет клапаны из нейтрального положения. При опускании поршня ролик вновь войдет в выемку рычага и переместит их в нейтральное положение.
На рис. 95 показана принципиальная пневматическая схема устройства.
Для накопления рабочего объема сжатого воздуха в схеме предусмотрен баллон 13, который с помощью трубопроводов соединен с цилиндром амортизатора 14. Постоянное пополнение баллона осуществляется от аккумулятора 11, который заряжается с помощью насоса 12. В результате этого в баллоне все время поддерживается давление, способное компенсировать усилие, создаваемое внешней силой (ГА) на поршневом штоке полиспаста, отчего поршень стремится занять нейтральное (среднее) положение.
На линии баллон — амортизатор расположены разобщительный клапан 2 и золотник 1, через который происходит поступление рабочего тела в цилиндр амортизатора.
На линии амортизатор — глушитель расположены золотник 5, разобщительный клапан 6, двухпозициоиный клапан 9 (19 на рис. 94), золотник 8 и глушитель 4. Золотник 5, закрываясь, создает сопротивление, препятствующее уходу поршня 15 от нейтрального положения, а открываясь, свободно пропускает воздух из цилиндра 14.
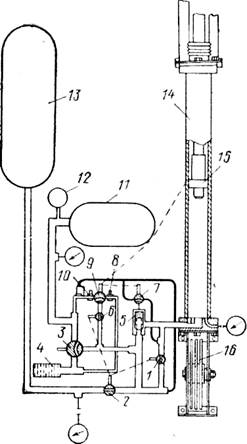
Рис. 95. Схема пневматической системы устройства.
1, 5, 8 — золотники; 2, 6 — разобщительные клапаны; 3 — регулирующий клапан; 4 — глушитель; 7, 9— двухпозиционные клапаны; 10 — регулятор; 11 — аккумулятор; 12 — насос; 13 — баллон; 14 — цилиндр; 15 — поршень со штоком; 16 — неподвижные блоки.
Для сохранения постоянного соотношения между давлением воздуха, поступающего из аккумулятора 11 в клапан 9, и давления в баллоне 13 служит регулятор 10.
Кроме того, в схеме предусмотрены двухпозиционный клапан 7 (16 на рис. 94), предназначенный для травления воздуха из дросселя 5, и клапан 3 для ручной регулировки.
При качке обеспечивающего судна поршень 15 полиспаста под действием внешних сил будет стремиться смещаться вверх и вниз от нейтрального положения (давление воздуха в баллоне 13 не уравновешивает усилие в канате). Если, пройдя нейтральное положение, поршень 15 будет продолжать движение вниз (сближение блоков полиспаста), произойдет открытие разобщительных клапанов 2 и 6 (клапан 3 закрыт). С помощью рычагов и тяг клапан 9 займет такое положение, при котором в баллон 13 и цилиндр 14 начнет поступать воздух из аккумулятора 11. Давление воздуха на поршень 15 возрастет, что заставит его изменить направление движения (поршень пойдет вверх; расхождение блоков полиспаста). Пока поршень 15 в своем движении вверх не поднимется выше нейтрального положения, воздух все время будет поступать в баллон 13, причем интенсивность его нагнетания регулируется золотником 8, а давление регулятором 10. Как только поршень подойдет к верхнему крайнему положению, клапан 9 займет положение, при котором воздух из баллона через глушитель 4 будет стравливаться в атмосферу до тех пор, пока поршень не опустится ниже нейтрального положения, и далее цикл начнет повторяться.
Устройство для компенсации динамических нагрузок каната. Для компенсации указанных нагрузок используется специальное устройство; принцип его работы заключается в том, что динамические нагрузки, возникающие в грузовом канате в результате качки- обеспечивающего судна, принимаются нагрузочным датчиком, от сигнала которого смещается подвижный блок, благодаря чему и происходит демпфирование рывков в канате.
Как показано на рис. 96, грузовой канат проходит через главный блок к блоку обратной связи, который опирается на нагрузочный датчик и дальше через многошкивные блоки 6 и 10 идет на барабан электролебедки.
Нагрузочный датчик 5, соединенный с блоком обратной связи 4, выдает сигнал, являющийся функцией нагрузки на канат, в том числе и динамической нагрузки от рывков. Этот сигнал преобразуется в давление жидкости, которая по трубопроводу вводится в разгрузочный клапан 24 и впускной клапан 21. Средняя часть этих клапанов соединена трубопроводом с пневматическим цилиндром 8. Внутри цилиндра имеется поршень 7, который с помощью штока смещает подвижный многошкивный блок 6 относительно неподвижного 10, чем вызывает травление или выбирание грузового каната.
При нормальном положении поршня 25 разгрузочного клапана отверстие диафрагмы закрыто и воздух, находящийся под поршнем, не выходит в атмосферу. Однако при внезапном увеличении нагрузки, воспринимаемой нагрузочным датчиком, гидравлическое давление в нижней части клапана 24 увеличивается, в результате чего поршень 7 смещается, сближая блоки 6 и 10, вытравливая грузовой канат и опуская груз, подвешенный на гаке. Наоборот, при внезапном уменьшении нагрузки на канат
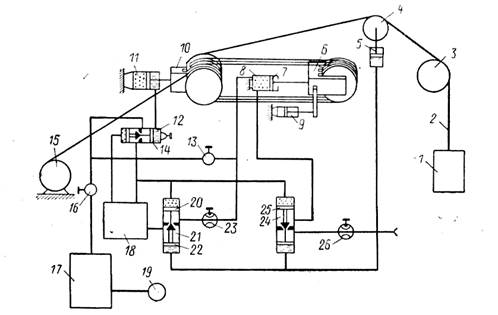
Рис. 96. Схема устройства компенсации динамических нагрузок каната.
1 — груз; 2— грузовой канат; 3— главный блок; 4— блок обратной связи; 5— нагрузочный датчик; 6— подвижный блок; 7, 14, 20, 22, 26— поршни; 8— пневматический цилиндр; 9— демпфирующее устройство; 10— неподвижный блок; 11— датчик обратной связи; 12— регулятор; 13, 16— запорные клапаны; 15— барабан электролебедки; 17— баллон высокого давления; 18— баллон; 19— воздушный насос: 21 —впускной клапан; 23, 26— золотники; 24— разгрузочный клапан.
поршень 20 впускного клапана смещается вниз вследствие падения гидравлического давления под поршнем 22, в результате отверстие в диафрагме клапана 21 открывается и пропускает воздух из баллона 18 сжатого воздуха через золотник 23 в главный цилиндр 8. С увеличением давления воздуха в этом цилиндре поршень 7 смещается в другую сторону и раздвигает блоки 6 и 10, выбирая слабину грузового каната и поднимая груз, подвешенный на гаке.
Многошкивный блок 10 практически неподвижен, и соединенный с ним датчик обратной связи 11 служит для выявления изменения на канате лишь статической нагрузки. Сигнал этой нагрузки изменяет давление жидкости, которая по трубопроводу вводится в регулятор 12. При увеличении гидравлического давлении на поршень 14 он смещается и открывает отверстия в диафрагме. Через него баллон 17 сжатого воздуха высокого давления сообщается с баллоном 18, благодаря чему в нем поддерживается необходимое рабочее давление воздуха.
Подача сжатого воздуха повышенного давления из баллона 17 в баллон 18 происходит до тех пор, пока давление воздуха под поршнем 14 не уравняется с давлением жидкости с другой стороны поршня. Поэтому как только датчик 11 зарегистрирует увеличение статической нагрузки, увеличивается давление воздуха в баллоне 18, и наоборот, при уменьшении нагрузки, воспринимаемой датчиком 11, рабочее давление в баллоне уменьшается. Насос 19 служит для поддержания высокого давления в баллоне 17, а демпфирующее устройство 9 для удержания поршня 7 главного цилиндра 8 в среднем положении.
§ 38. Выводы
Интерес к изучению океанского дна возрастает с каждым годом. Это обусловлено многими причинами и не последнее место здесь занимает резкое увеличение масштабов разведки и добычи нефти в открытом море. Выдвигаются самые разнообразные проекты разработки новых конструкций буровых вышек и предложения создать в открытом море для хранения нефти гигантских укрепленных на якорях подводных резервуаров. Строительство одного такого резервуара уже началось в Персидском заливе.
Интенсивно развивающаяся в последние годы за рубежом глубоководная техника для изучения и освоения океана представлена в основном обитаемыми техническими средствами, такими, как самоходные глубоководные аппараты и исследовательские подводные лодки, глубоководные водолазные системы, подводные дома и лаборатории.
Транспортировка этих средств в район выполнения работ, а также спуск, подъем и обслуживание их в период пребывания в подводном положении осуществляется главным образом с помощью надводных судов обеспечения. Последние объединяют переоборудованные суда и суда, построенные по специальным проектам, которые, как правило, предназначаются для обслуживания одного определенного типа ГА. Таким образом, обеспечивающее судно и ГА рассматриваются в настоящее время как единый комплекс.
Все обеспечивающие суда имеют относительно небольшое водоизмещение порядка 1500 т и в зависимости от конструкции и массы обслуживаемых ими ГА оборудуются различными типами спуско-подъемных устройств, средствами крепления, перемещения аппаратов по судну и другими системами.
Используемые за рубежом на обеспечивающих судах спускоподъемные устройства работают надежно при состоянии моря до 3 баллов.
В настоящее время ведутся работы по созданию новых более совершенных способов, систем и судовых грузовых устройств для спуска и подъема ГА, которые допускают выполнение спуско-подъемных операций в условиях более значительного волнения.
Решение этого вопроса идет по пути применения различных конструкций автоматических лебедок, лебедок с регулированием натяжения обгонных муфт и устройств компенсации динамических усилий в грузовых канатах. Помимо этого создаются гаки с дистанционным управлением и средства захвата ГА под водой.
Предусматриваются различные мероприятия по устранению или ограничению продольного и поперечного раскачивания ГА при его опускании и подъеме, для чего спуско-подъемные устройства оборудуются системами ограничения этого раскачивания, что позволяет выполнять грузовые операции с необходимой степенью безопасности.
Для спуска и подъема тяжелых ГА за рубежом нашли применение канатные элеваторы, которыми оборудуются обеспечивающие суда катамаранного типа.
Специфика проведения операций по спуску и подъему ГА потребовала создания канатов новых типов, изготовляемых на основе современной технологии, а успехи в области разработки синтетических материалов позволили создать прочные и эластичные канаты с высокой коррозионной стойкостью. Появились канаты, имеющие изолированные проводники, что позволяет использовать их для передачи электропитания и различных сигналов с обеспечивающего судна на ГА. (Плетеный канат, как правило, имеет один изолированный проводник, а свивной — по проводнику в каждой пряди).
Канаты из синтетического материала имеют меньшую массу и меньшее поперечное сечение, чем стальные, при прочих равных характеристиках. Кроме того, при намокании они не растягиваются и не теряют прочности, как пеньковые.
Фирма Rhodiaceto (Франция) создала синтетический канат, механическая прочность которого выше, чем у стального. Другая фирма — Samson (США) изготовляет канат, совершенно не подверженный раскручиванию. Этот канат состоит из плетеного сердечника, покрытого плетеной оболочкой. Канаты, изготовленные таким способом, прочнее аналогичных свивных и имеют значительно меньшее удлинение. У плетеного каната более гладкая поверхность, чем у свивного, в результате чего уменьшается гидродинамическое сопротивление, что очень важно при проведении операции с ГА, требующей хода обеспечивающего судна. Кроме того, плетеный канат при хранении во влажном состоянии не теряет эластичности, что обычно свойственно свивным канатам. Отрицательным качеством плетеного каната является относительно высокая его стоимость по сравнению со свивным, поэтому целесообразно применять его в особо ответственных операциях.
Для изготовления синтетических канатов чаще всего применяют полистирол и нейлон. Полистирол с высокими механическими показателями применяется для образования сердечника, а нейлон — для наружной оплетки.
Для сцепления нитей сердечника и оплетки используются химические связующие (полиамиды), придающие канату гибкость, огнестойкость и диэлектрические свойства.
Синтетический канат (сердечник из полистирола, оплетка из нейлона, связующее — полиамиды) имеет массу в 2,5 раза меньшую, чем стальной канат одинаковой грузоподъемности.
В недалеком будущем, как считают зарубежные специалисты, синтетические канаты вытеснят из морской практики как растительные, так и стальные канаты.
Значительный интерес представляет новый способ обеспечения работ с ГА, основанный на использовании для их спуска и подъема погружающихся катамаранов и затапливаемых доков. Перспективность этого способа в том, что он допускает проведение работ в условиях значительного волнения.
Раздел второй
ОСНОВЫ РАСЧЕТА И МОДЕЛИРОВАНИЯ СРЕДСТВ ПЕРЕДАЧИ ГРУЗОВ В МОРЕ
Глава VII
ВЫПОЛНЕНИЕ ДИНАМИЧЕСКИХ РАСЧЕТОВ МЕТОДАМИ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
§ 39. Общие положения
Традиционные судовые грузовые устройства (краны, стрелы и т. п.) имеют в своем составе, как правило, три механизма: поворота, изменения вылета стрелы и подъема. Такие устройства обеспечивают надежность и безопасность проведения грузовых операций только на тихой воде или при незначительном волнении моря. Безопасность передачи грузов в открытом море, т. е. в условиях качки судов, они не гарантируют, так как не исключают возможности соударения передаваемого груза с палубой или надстройками судов. Поэтому с развитием морских транспортных перевозок и появлением необходимости производства грузовых операций непосредственно в открытом море встал вопрос о создании таких судовых грузовых устройств, которые позволили бы надежно и безопасно (т. е. безударно) осуществлять грузовые операции при волнении моря до 3—5 баллов и даже более.
В настоящее время используются следующие конструктивные решения для создания указанных устройств: 1) введение в состав механизма подъема традиционных грузовых устройств так называемого механизма слежения, который обеспечивает равномерный подход передаваемого груза к палубе (или характерной точке) обслуживаемого судна; 2) снабжение кранов устройствами проти-вораскачивания груза.
Поскольку описания и методы расчета традиционных грузовых устройств широко освещены в технической литературе, то в данной книге изложены лишь особенности проектирования и расчета тех дополнительных устройств или механизмов, которые предназначены только для решения задачи о безударности передачи грузов.
При расчете грузовых устройств наличие механизма слежения и средств противораскачивания вызывает необходимость определения их эффективности и величины возникающих при этом динамических нагрузок в канатах грузового устройства, которые передаются к приводам и металлоконструкциям устройства.
В настоящее время наметилось большое многообразие в конструктивном исполнении механизмов слежения и устройств противораскачивания, что объясняется, во-первых, различными требованиями, предъявляемыми к тем или иным грузовым устройствам, во-вторых, отсутствием опыта в их эксплуатации, так как они еще не получили широкого внедрения. Каждое такое грузовое устройство может быть описано вполне конкретной, только ему присущей расчетной схемой. Из этого следует, что сколько существует различных конструкций грузовых устройств, столько же будет и их расчетных схем. Таким образом, целесообразна разработка общих основ расчета, которые в своей основе были бы пригодны к каждой конкретной конструкции устройств для контактного и траверзного способов передачи грузов.
В качестве механизмов слежения обычно используются грузовые противовесы, пневмо- или гидроприводы и т. п. (см. гл. II и IV). Эффективность механизмов слежения выражается в соответствии рабочего хода их выходного органа (например, барабана) возможным перемещениям между характерными точками обслуживающего и обслуживаемого судов.
Методика расчета указанных возможных перемещений приведена в [2, 16]. Некоторые пояснения, дополнения и порядок осуществления такого расчета изложены в гл. VIII.
В качестве устройств противораскачивания широко используются так называемые полифилярные подвески, чаще всего бифилярные или трифилярные, основы расчета которых и рассмотрены в настоящей главе.
§ 40. Общие принципы выполнения динамического расчета Основные понятия и определения
Динамика является разделом механики, в котором изучаются законы движения материальных тел (т. е. тел, имеющих массу) под действием сил. В большинстве инженерных задач (например, полет снаряда) не требуется знания закона движения всех точек материального тела, а достаточно только определить закон движения центра масс этого тела. Согласно теореме теоретической механики о движении центра масс системы тел или
В однородном поле тяжести центр масс тала совпадает с его центром тяжести. Однородным полем тяжести считается такое, в котором силы тяжести, действующие на частицы тела, параллельны друг другу и сохраняют для каждой частицы постоянную величину при любых поворотах тела. Практически поле-тяжести материальных тел, размеры которых очень малы по сравнению с земным радиусом, можно считать однородным.
материальных точек центр масс системы движется, как материальная точка, масса которой равна массе всей системы и к которой приложены все внешние силы, действующие на систему. Материальной точкой называется воображаемое материальное тело, не имеющее размеров, но обладающее такой же массой, как и протяженное тело, движение которого изучается. Совокупность материальных точек или тел, в которой положение или движение каждой точки (тела) зависит от положения и движения всех остальных точек (тел), называется механической системой этих точек или тел. Очевидно, что обычное твердое материальное тело можно также рассматривать как систему материальных точек (частиц, образующих это тело).
Силы, действующие на точки (тела) системы, делятся на внутренние и внешние. Внутренними называются силы взаимодействия точек (тел) рассматриваемой системы. Внешними являются силы, действующие на точки (тела) системы со стороны точек (тел), не входящих в состав данной системы.
Внутренние силы обладают следующими свойствами:
— главный вектор (геометрическая сумма) всех внутренних сил одной системы равен нулю;
— главный момент (сумма моментов) всех внутренних сил системы относительно любой точки или оси равен нулю.
В зависимости от границ выбранной системы одни и те же силы могут быть как внутренними, так и внешними. И внутренние, и внешние силы могут быть активными (заданными) или реакциями связей. Кроме того, эти силы могут быть постоянными или переменными по величине и направлению. Переменные силы могут зависеть от времени (например, возмущающие силы, вызывающие колебания), от положения тела (например, сила упругости пружины), от скорости тела (силы сопротивления движению окружающей движущееся тело среды).
Связью в механике называется все то, что ограничивает перемещение данной точки (тела) в пространстве. Сила, возникающая при воздействии связи на тело и препятствующая его перемещениям, называется реакцией связи. Идеальными (совершенными) называются такие связи, сумма работ всех реакций которых при элементарном перемещении системы (тела) равна нулю (например, гибкая нерастяжимая нить, жесткий недеформируемый стержень и т. п.). Геометрическими (голономными, конечными) называются связи, налагающие ограничения только на положение точек системы в пространстве и совершенно не влияющие на их кинематику (скорость, ускорение). Все связи могут быть одно- и двусторонними. Если связь накладывает ограничения на перемещение точки в каком-либо одном направлении и одновременно в другом, противоположном первому, то такая связь называется двусторонней (жесткий стержень). Если же связь не накладывает ограничения на Перемещение точки в противоположном направлении, то она будет односторонней (гибкая нить).
Действие одной и той же силы на разные материальные тела не приводит к одинаковому результату. По истечении некоторого одинакового промежутка времени эти тела пройдут разные расстояния и будут иметь разные скорости. Свойство материальных тел быстрее или медленнее изменять скорость своего движения (приобретать то или иное ускорение) под действием приложенных сил называется инертностью тела. Количественной мерой инертности данного тела является физическая величина, называемая массой тела. Очевидно, что ускорения, приобретенные двумя разными свободными телами в результате действия на них одинаковых сил, будут согласно второму закону Ньютона обратно пропорциональны массам этих тел.
Таким образом, можно сделать следующий вывод: под действием сил материальные тела (или системы материальных тел) приобретают ускорения (именно ускорения, а не скорости); это означает, что движение тел под действием сил не является равномерным и, следовательно, методы статики к изучению такого движения не применимы.
Задачи динамики и методы их решения
Из сказанного выше ясно, что целью динамики является установление взаимосвязи между действующими на систему (точку) силами и законом движения системы (точки) под действием этих сил.
Первая задача динамики сводится к определению действующих на точку сил при известном законе ее движения. Вторая задача динамики (основная) заключается в определении закона движения точки при известных действующих на нее силах.
Решаются обе задачи с помощью основного закона динамики (второго закона Ньютона). Применительно к точке основной закон динамики выражается следующим уравнением:

где m — масса точки; w — абсолютное ускорение точки; ∑Fk — сумма всех действующих на точку внешних сил, включая реакции связей; к — порядковый номер силы.
При решении практических задач вместо векторного уравнения (1) удобнее пользоваться уравнениями в проекциях, которые получим путем проецирования уравнения (1) на оси прямоугольной (декартовой) системы координат

Выражения (2) называются дифференциальными уравнениями криволинейного движения точки.
Если траекторией движения точки является окружность (например, колебания математического маятника), то движение точки может быть описано дифференциальным уравнением в угловых координатах

где J = mp2 — момент инерции массы точки относительно оси вращения; т — масса точки; ρ — расстояние от точки до оси вращения (радиус вращения);  — угловое ускорение;
— угловое ускорение;
∑M(Fk) — сумма моментов всех действующих на точку внешних сил Fk (активных сил и реакций связей), взятых относительно оси вращения.
Порядок решения первой задачи динамики:
1) по заданному закону движения точки найти закон изменения во времени ее ускорения, взяв вторую производную;
2) подставить найденное значение ускорения в формулы (1) или (2) и вычислить величину равнодействующей всех сил, действующих на точку;
3) для вычисления реакции связи необходимо знать все активные силы.
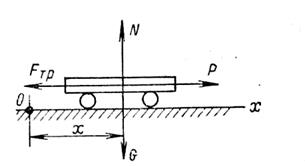
Пример 1. Закон движения тележки весом G по горизонтальной плоскости под действием силы P (рис. 97). выражается уравнением х=lt3. Определить величину силы Р, принимая силу трения качения равной Fтp=bG.
Решение. Взяв вторую производную от х по t, получим х = 6lt. Подставим величину х в первое уравнение (2) и найдем 6mlt = Р — bG, откуда
|
| Рис. 97. К примерам 1, 4, 7, 10. |

т. е. для обеспечения требуемого закона движения тележки сила Р должна быть переменной величиной, зависящей от времени.
Пример 2. Груз массой m (рис. 98) поднимается на канате с ускорением φ. Вычислить натяжение каната S.
Решение. Вычислим сумму проекций всех действующих на груз сил
Используя третье уравнение (2), получим mφ=S—mg, откуда S=m(φ+g).
Порядок решения второй (основной) задачи динамики:
1) выбрать начало отсчета и провести через него координатные оси; начало отсчета следует совмещать с начальным положением точки или, если таковое имеется, с положением ее статического равновесия; положительное направление координатных осей надо направлять в сторону движения;
2) изобразить движущуюся точку в произвольном положении, но так, чтобы ее координаты х, у, z и скорости х, у, z имели в этом положении положительное значение; обозначить все действующие на точку внешние силы, включая реакции связей;
3) составить выражения для сумм проекций всех сил на координатные оси, выразив при этом все переменные силы через те величины (t, х, у, z, х, у, z), от которых они зависят;
4) вычисленные в п. 3 значения
∑Fkx, ∑Fky, ∑Fkz подставить в дифференциальные уравнения (2);
5) решить полученные дифференциальные уравнения.
Пример 3. Груз массой m подвешен в неподвижной точке О на канате длиной l (рис. 99). Определить закон колебаний груза.
Решение. Причинами колебаний груза могут быть: отклонение груза от положения статического равновесия (от вертикали) на какой-то угол φ0; сообщение грузу какой-то начальной скорости φ0; одновременное действие первых двух факторов.
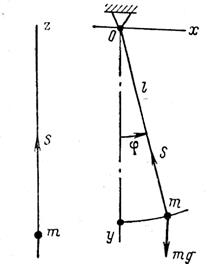
Рис. 98. К примеру 2. Рис. 99. К примерам 3, 5, 11.
Для нахождения закона колебаний груза используем дифференциальное уравнение (3). За начало отсчета примем вертикальную ось у. Положительным направлением будем считать такое, при котором движение происходит против часовой стрелки. Изобразим груз в произвольном положении, определяемом углом φ, и обозначим все действующие на него в этом положении внешние силы: массу груза mg, натяжение каната S (реакция связи). Найдем сумму моментов этих сил относительно оси вращения (точки О):

Знак «минус» в правой части поставлен по той причине, что момент от силы тяжести mg направлен в сторону, обратную положительному направлению движения груза. Подставляя значение ∑M(Fk) в уравнение (3), получим

или

Полагая колебания малыми, т.е. φ=sinφ, получим
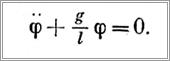
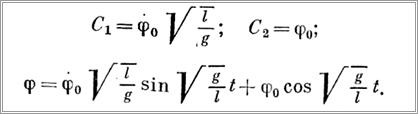
Решение последнего дифференциального уравнения имеет вид

Постоянные интегрирования С1 и С2 найдем из начальных условий, полагая, что при t=0: φ =φ0, φ=φ0. Тогда получим
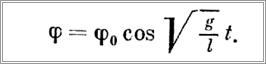
Если причиной колебаний является только отклонение груза от положения равновесия (от вертикали) на угол 
 , то колебания будут происходить по закону
, то колебания будут происходить по закону
Если же причиной колебаний является только сообщение грузу в положении статического равновесия начальной скорости , то закон колебаний будет выражаться уравнением
Относительно угловой скорости дифференциальное уравнение (За) может быть решено точно. Для этого его необходимо представить в виде
а затем произвести следующие операции:
После интегрирования получим
Постоянная интегрирования С определяется исходя из начальных условий.
Натяжение каната S будет складываться из составляющей веса груза и центробежной силы, т. е.

Пример 4. Определить закон движения тележки (см. рис. 97), на которую в точке О стала действовать постоянная по величине и направлению сила Р, если сила трения качения Fmp=bv(v — скорость движения тележки). До начала действия силы Р тележка пребывала в покое.
Дата добавления: 2020-08-31; просмотров: 576;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
