Принимающее судно; 2 - передающее судно; 3 - кранцы; 4 — креплениекранцев. 4 глава
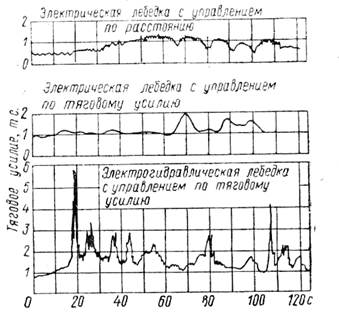
Рис. 60. Изменение величины тяговых усилий различных типов лебедок.
 Рис. 61. Одпоканатная дорога с постоянным натяжением: а— схема устройства; б — график суммарных вертикальных колебаний груза при постоянном натяжении каната; в— график вертикальных колебаний груза, обусловленных системой управления.
Рис. 61. Одпоканатная дорога с постоянным натяжением: а— схема устройства; б — график суммарных вертикальных колебаний груза при постоянном натяжении каната; в— график вертикальных колебаний груза, обусловленных системой управления.
1 — судно снабжения; 2— лебедки; 3 — передающая полумачта; 4, 9— огибающие движения точек подвеса; 5— траектория движения груза; 6 — точка (средняя) подвеса канатов; 7 — груз; 8 — грузовой канат; 10 — блок; 11 — принимающий корабль; Т1 и Т2 — ветви тягового каната.
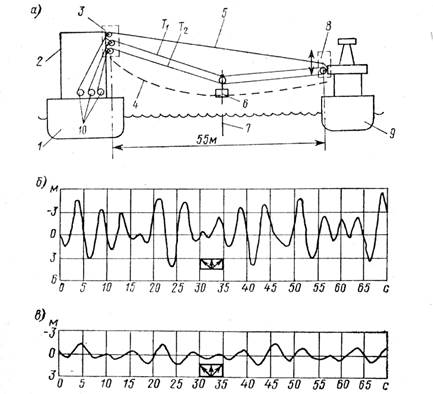
Рис. 62. Одноканатная дорога с регулируемым натяжением: а— схема устройства; б — график суммарных вертикальных колебаний груза при регулируемом натяжении каната; в— график вертикальных колебаний груза, обусловленных системой управления.
1 — судно снабжения; 2 — передающая полумачта; 3, 8 — огибающие движения точек подвеса; 4 — траектория движения груза; 5 — измерительный канат; в — груз; 7 — середина пролета; 9 — принимающий корабль; 10 — лебедки; T1 и Т2 — ветви тягового каната.
Как видно из графиков (рис. 61, 62), максимальная амплитуда колебания груза при передаче его по канатной дороге с постоянным натяжением составляет 18,6 м, а у дороги с регулируемым натяжением 10,5 м. Приведенные величины амплитуд в основном обусловлены вертикальными составляющими движения точек подвеса канатной дороги. Если исключить эти составляющие, то на долю вертикальных колебаний груза за слет погрешностей системы управления придется: для системы с постоянным натяжением от +4,5 м до —5,75 м, а для системы с регулируемым натяжением от +1,7 м до —1,2 м (улучшение достигнуто благодаря применению измерительного каната). Такое управление - применимо также для двухканатных дорог с отдельным несущим канатом и дает аналогичное улучшение.
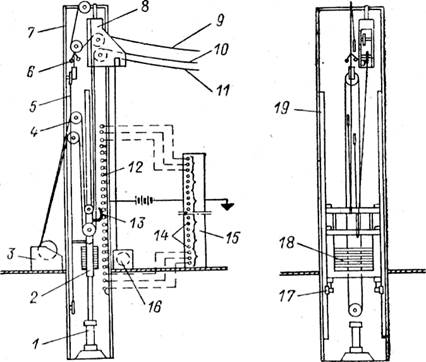
Рис. 63. Передающая полумачта с противовесом для натяжения канатов.
1 — амортизатор; 2 — каретка; 3 и 4 — лебедка и блок несущего каната; 5 — трос регулятора; в — регулятор; 7 — мачта; 8 — скользящий блок; 9 — несущий канат; 10, 11 — ветви тягового каната; 12 —контактные переключатели; 13 — контактная скоба; 14 — сигнальные лампы; 15 — сигнальное устройство; 1в — лебедка тягового каната; 17 — захват; 18 — противовес; 19 — направляющие каретки.
Система управления при помощи измерительного каната применима не только для регулирования натяжения канатных дорог с помощью гидравлических лебедок, но и для других приводов и механизмов.
Ниже рассматриваются схемы и принципиальные возможности основных типов устройств натяжения канатных дорог.
Устройство натяжения канатной дороги с помощью противовеса. Устройство (рис. 63) состоит из прямоугольной полой мачты с двумя внутренними вертикальными направляющими, по которым перемещается вверх и вниз противовес. Отдельные элементы противовеса компонуются в каретке с роликами для катания по направляющим.
Открытый доступ в мачте позволяет загружать определенное количество элементов в зависимости от массы предназначенного к передаче груза.
С целью увеличения длины рабочего хода каретки мачта проходит вниз через палубы судна снабжения. В нижней части мачты предусмотрен гидравлический амортизатор для смягчения удара каретки.
На случай обрыва несущего каната для безопасности предусмотрен регулятор, с помощью которого при падении каретки срабатывает предохранительный захват.
При передаче груза с изменением расстояния между судами меняется рабочая длина несущего каната, поэтому каретка противовеса непрерывно поднимается и опускается внутри мачты.
Для удержания противовеса в среднем положении оператор изменяет скорость и направление вращения лебедки несущего каната. Когда каретка противовеса приближается к верхнему положению, оператор включает лебедку на вытравливание несущего каната, а когда к нижнему, — на выбирание.
Для наблюдения за положением противовеса предусмотрено сигнальное устройство, которое указывает относительное положение каретки в мачте.
Как показано на рис. 63, несколько контактных переключателей, приводимых в действие установленной на каретке контактной скобой, расположено вдоль пути ее перемещения в мачте.
Панель с сигнальными лампами включена в схему таким образом, что когда противовес находится вверху, на панели горят верхние лампочки, и наоборот, при нахождении его внизу — нижние. Как правило, крайние лампочки — красного цвета, остальные — зеленого.
Устройства с натяжением канатной дороги с помощью противовеса используются на танкерах-заправщиках, где противовес в 5,45 т создает постоянное натяжение канатов, достаточное для поддержания шланга длиной 92 м, наполненного топливом.
Аналогичные устройства установлены на транспортах боеприпасов ВМС США. Эти устройства имеют противовес 14,5 т, который создает постоянное усилие натяжения, позволяющее производить передачу груза массой 2,7 т.
Устройство натяжения каната, использующее энергию расхождения и качки судов. Конструкция натяжной лебедки (рис. 64) включает барабан, на оси которого закреплена шестерня, входящая в зацепление с шестерней 4 на приводном валу 8. Привод барабана представляет собой аксиально-плунжерный гидродвигатель с постоянной производительностью. В его состав входят: подвижная наклонная шайба 9, цилиндры 10 с поршнями, закрепленными на валу 8.
От гидродвигателя идет трубопровод к гидроаккумулятору 13, и котором находится двухступенчатый поршень, причем поршень меньшего диаметра перемещается в нижней камере, а большего — в верхней, соединенной трубопроводом с баллоном сжатого воздуха или газа. На трубопроводе 11 имеется тройник с ответвлением к предохранительному клапану 17, откуда трубопровод идет в аккумулирующий резервуар 1 с рабочей жидкостью. Из нижней части резервуара выходит трубопровод 2 к гидродвигателю 3.При работе на вытравливание несущего каната под действием внешней силы барабан лебедки будет вращаться и усилие его вращения передастся через шестерни на вал гидродвигателя и дальше к цилиндру поршней.
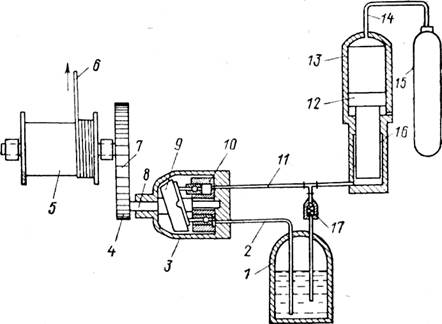
Рис. 64. Устройство натяжения каната, использующее энергию расхождения и качки судов.
1 — резервуар; 2, 11, 14 — трубопроводы; 3 — гидродвигатель; 4,7 — зубчатые шестерни; 5 — барабан; в — канат; 8,9 — вал и наклонная шайба гидродвигателя; 10 — цилиндры поршней; 12, 16 — поршни гидроаккумулятора; 13 — гидроаккумулятор; 15 — баллон; 17 — предохранительный клапан.
При этом поршень, находящийся внизу, по мере дальнейшего поворота вокруг вала 8 будет перемещаться влево и производить засасывание рабочей жидкости по трубопроводу 2 из резервуара 1. Поршень, находящийся в верхнем положении, будет смещаться вправо и нагнетать рабочую жидкость через трубопровод 11 в гидроаккумулятор 13.
Когда рабочая жидкость скапливается в нижней части гидроаккумулятора, поршень 16 перемещается вверх, сжимая газ, находящийся в верхней камере гидроаккумулятора. Сжатие газа происходит также в трубопроводе 14 и баллоне 15, соединенных с гидроаккумулятором.
Накопление энергии в гидроаккумуляторе будет происходить до тех пор, пока несущий канат вращает барабан 5. При сближении судов поршень 16 отжимается вниз давлением газа верхней камеры, а жидкость перемещается через трубопровод 11 в гидродвигатель, проходя через клапаны и цилиндры, и поступает в резервуар. В результате этого поршни и цилиндры гидродвигателя начинают вращаться, передавая вращение валу 8, шестерням 4, 7 и барабану 5, который начинает выбирать слабину каната. Другими словами, при стравливании каната с барабана гидродвигатель работает как насос, заряжая аккумулятор, а при выбирании его работает как гидропривод барабана.
Клапан 17 (обычный предохранительный) срабатывает, когда давление в трубопроводе 11 превышает допустимую величину.
Недостатком показанной на рис. 64 схемы является то, что потери давления в аккумуляторе, вызванные работой лебедки при выбирании слабины каната, не будут полностью компенсированы за счет аналогичного цикла вытравливания его, поскольку схема не компенсирует неизбежных протечек рабочей жидкости, вследствие чего объем масла в аккумуляторе уменьшится.
На рис. 65 приведена схема устройства, где этот недостаток ликвидирован. Как видно из схемы, барабаны 4 и 33 соединены шестернями с гидродвигателями 2 и 28, наклонные шайбы которых соединены со штоками механизмов изменения величин хода поршней, а трубопроводы — соответственно с золотниками 8 и 25. От них отходят трубопроводы к клапанам 22 и 23, а последние, в свою очередь, соединены соответственно с аккумулятором 17 и гидроагрегатом 14. Золотниками 8 ж 25 барабаны 4 и 33 в любой момент могут быть переключены на раздельную или совместную работу в зависимости от потребности.
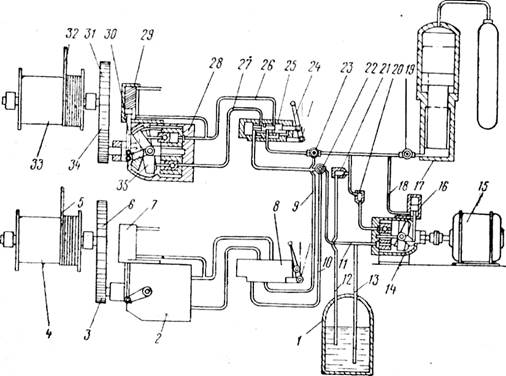
Рис. 65. Двухбарабанное устройство натяжения канатов, использующее энергию расхождения и качки судов.
1 — резервуар; 2 и 28 — гидродвигатели; 3, 6, 31 и 34 — шестерни; 4, 33 — барабаны; 5, 32 — несущие канаты; 7, 16 и 29 — механизмы наклона шайб; 25 — золотники; 9, 10, 11, 12, 13, 18, 26 и 27 — трубопроводы; 14 — гидроагрегат; 15 — электродвигатель; 17 — аккумулятор; 19 — вентиль: 20, 21, 22 и. 23 — клапаны; 24 — рукоятка; 30 — шток наклона шайбы; 35 — наклонная шайба.
Аксиально-плунжерный гидроагрегат 14 с параллельными поршнями предназначен для первоначальной зарядки системы и приведения ее в действие путем подачи рабочей жидкости (масло) в гидродвигатели 2 и 28. Такая конструкция позволяет приводить лебедки в действие регулированием золотников 8 ж 25 без зарядки аккумулятора. Гидроагрегат приводится от электродвигателя 15. Перед началом установки канатной дороги между судами производится зарядка аккумулятора 17, для чего вентиль 19 открывается и золотники 8 и 25 устанавливаются в положение, при котором подходящие к ним трубопроводы перекрыты. Затем включается электродвигатель и гидроагрегат начинает перекачивать масло из резервуара в нижнюю камеру аккумулятора.
Гидроагрегат работает до тех пор, пока аккумулятор не будет полностью заряжен. В процессе его зарядки давление в трубопроводе 18 постепенно повышается, благодаря чему механизм 16 регулирования хода поршней гидроагрегата поворачивает наклонную шайбу насоса в положение, соответствующее нулевому ходу поршней (достигается при полной зарядке аккумулятора).
Когда давление в аккумуляторе достигнет требуемой величины и вентиль 19 закрыт, можно приступить к вытравливанию несущего каната для установки канатной дороги между судами. Гидроагрегат, приводимый электродвигателем, работает как насос, подавая жидкость из резервуара через трубопроводы к гидродвигателю 28, вращающему барабан 33 в направлении вытравливания каната. Жидкость из гидродвигателя поступает снова в гидроагрегат или в резервуар. Этот процесс продолжается до тех пор, пока канат не будет вытравлен на длину, позволяющую установить канатную дорогу между судами. После этого золотник 25 переключается на выбирание и включается аккумулятор, который автоматически создает натяжение несущего каната.
При расхождении судов канат под действием внешней силы от расхождения точек подвеса вытравливается и гидродвигатель 28, работая в режиме насоса, закачивает масло в аккумулятор. При сближении судов для выборки слабины каната жидкость под давлением из аккумулятора подается в гидродвигатель и, произведя работу, возвращается в резервуар.
Электродвигатель в течение всего процесса передачи груза остается включенным, но потребление энергии при автоматической работе канатной дороги весьма незначительно, поскольку находящаяся в трубопроводе жидкость удерживает поршни гидроагрегата в положении нулевого хода. Таким образом, электродвигатель работает лишь на компенсацию протечек жидкости в системе. Механизм 29 увеличивает ход поршней гидродвигателя 28 по мере снижения давления в трубопроводе 26, т. е. при выборке каната гидродвигатель перекачивает максимальное количество жидкости. Благодаря этому в аккумулятор возвращается рабочая жидкость в максимальном объеме.
Конструкция устройства позволяет отрегулировать работу системы таким образом, чтобы полностью компенсировать все потери рабочей жидкости в системе, а также работу лебедки на выбирание в случае длительного схождения судов при рыскании.
Барабан 4 может быть использован так же, как и барабан 33. При одновременном использовании этих барабанов клапаны 22 и 23 устанавливаются в такое положение, которое обеспечивало бы параллельное соединение золотников 8 ж 25 с аккумуляторной системой.
После того как передача грузов закончена, канат отсоединяют от принимающего судна и наматывают на барабан за счет накопленной аккумулятором энергии. Если накопленной энергии окажется недостаточно, включается электродвигатель и с помощью гидроагрегата процесс намотки каната завершается.
При выбирании каната его натяжение определяется энергией аккумулятора за вычетом всех потерь, а в случае травлении — внешней силой, достаточной для преодоления энергии аккумулятора с учетом всех потерь.
§ 25. Грузовые тележки канатных дорог
Грузовые тележки предназначены для транспортировки груза с судна снабжения на принимающий корабль, а также на другой береговой или морской объект. Кроме того, если в приемно-передающих устройствах Отсутствуют системы скользящих блоков или качающихся консолей, подъем и опускание грузов производятся с помощью грузовых тележек. Поскольку точки подвеса несущего каната непрерывно меняют свое положение в пространстве и длина каната при этом соответственно изменяется, то, очевидно, траектория движения грузовой тележки с грузом при перемещении ее по несущему канату будет весьма сложной.
По своей конструкции грузовые тележки могут быть различных типов.
Грузовая тележка с барабаном. На рис. 66 показана схема устройства тележки с барабаном, которая состоит из барабана с тросом, пружинного приспособления, тормоза, грузового гака и спускового приспособления.
Когда тележка с грузом подходит по несущему канату к приемному устройству корабля, вручную воздействуют на спускное приспособление, с помощью которого грузовой гак отцепляют от тележки, и груз зависает на тросе. При дальнейшем натяжении спускного приспособления, тормоз ослабляется и груз опускается па палубу корабля с контролируемой скоростью. С прекращенном натяжения спусковое приспособление снова включает тормоз и груз можно снять с гака. Во время опускания груза пружины находятся под нагрузкой.
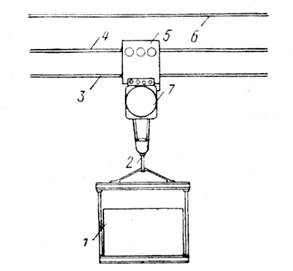
Рис. 66. Схема грузовой тележки с барабаном.
1- контейнер; 2 — гак; 3, 6 - ветви тягового каната; 4 — несущий канат;5 _ грузовая тележка; 7 — грузовой барабан.
После выключения тормоза грузовой гак силой пружины снова поднимается к спускному устройству. Такой метод опускания груза используется только в одном направлении, поэтому с помощью рассмотренного устройства нельзя передавать грузы обратно с корабля на судно снабжения.
Тележка с барабаном применяется для передачи грузов кораблям, не имеющим приемных устройств со скользящими блоками.
Грузовая тележка с дистанционным управлением. Тележка имеет подъемное устройство для поднятия и опускания груза,
передаваемого с судна снабжения на принимающий корабль. Лебедка этого устройства работает от тягового каната, поэтому отпадает необходимость в установке специального двигателя на самой тележке. Подъемное устройство приводится в действие с помощью дистанционного управления.
Как показано на схеме грузовой тележки (рис. 67), барабан 6 при поднятии или опускании груза приводится в движение блоком 7, фрикционно связанным с тяговым канатом 8. Для обеспечения последовательности в работе на грузовой тележке установлены два тормозных механизма, один из которых взаимодействует с несущим канатом, другой — с тяговым. Оба тормоза имеют электрогидравлические приводы. При срабатывании тормоза, взаимодействующего с несущим канатом 17, колодки 16 и 18 зажимают его и тележка останавливается в фиксированном положении. В этот момент движение тягового каната через блок 7 вызовет вращение барабана 6 подъемной лебедки и груз будет опускаться или подниматься в зависимости от направления движения тягового каната.
При срабатывании тормоза, взаимодействующего с тяговым канатом 22, колодки 21 и 23 зажимают его и грузовая тележка может передвигаться на роликах по несущему канату в любую сторону.
Система тормозов сблокирована таким образом, что когда тормозные колодки 16 и 18 зажимают несущий канат 17, то колодки 21 и 23 освобождают тяговый канат 22 и наоборот. Эта блокировка осуществляется с помощью дистанционно управляемого соленоида 14, клапана 13 и тормозных гидроцилиндров 15, 19, 20 и 24.
Тяговый канат вращает также блок 5, который через роликовую цепь приводит в действие насос 3, создающий в гидросистеме постоянное давление масла. Для выравнивания работы системы имеется гидропневматический аккумулятор 12.
Масло поступает в систему из бака через фильтр и после отработки возвращается обратно. Грузовая тележка с автоматическим захватом. На рис. 68 показана конструкция тележки с деталями механизма захвата груза. Как видно из рисунка, тележка движется на катках по несущему канату с помощью тягового каната, концы которого закреплены за боковые стенки корпуса тележки. Снаружи на обеих стенках имеются направляющие ролики, при подходе тележки в крайнее положение они входят в направляющие пазы приемной головки и устанавливают тележку в фиксированном положении.
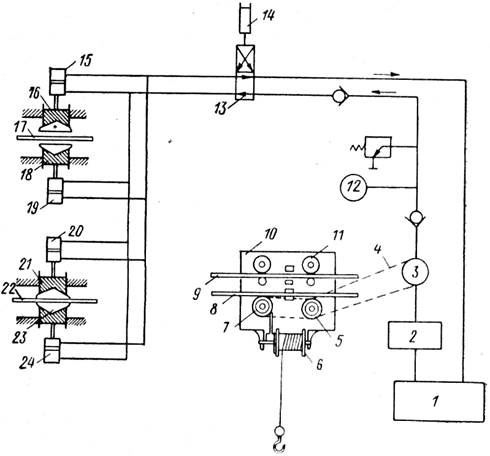
Рис. 67. Схема грузовой тележки с дистанционным управлением.
1 - бак; 2 — фильтр; 3 — насос; 4 — роликовая цепь; 5,7 — блоки; 6— барабан; 8 и 22 - тяговые канаты; 9и 17 — несущие канаты; 10— грузовая тележка; 11 — ролик; 12 — аккумулятор; 13 — клапан; 14 — соленоид; 15, 19, 20, 24 - тормозные гидроцилиндры; 16, 18, 21, 23 — тормозные колодки.
В боковых стенках тележки имеются вырезы с широкой горловиной, сужающейся кверху. На оси крепится крюк с утолщением которой крюк зацепляется за строп. Для удержания крюка в закрытом положении во время пере дачи груза его стопорная поверхность входит в зацепление с упором 2.
Соединительная тяга шарнирно соединена с рычагом, который, в свою очередь, соединен с крюком и механизмом его отвода.
С перемещением механизма отвода крюка вправо поворачивается против часовой стрелки рычаг, в результате чего крюк сходит с упора и устанавливается в открытое положение, освобождая грузовой строп.
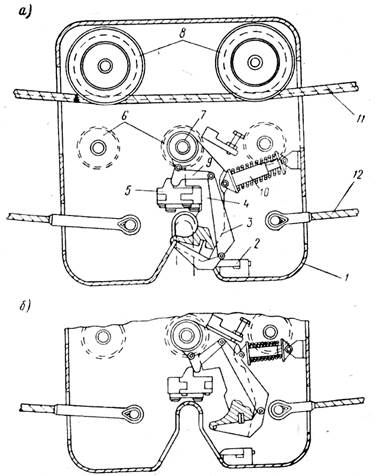
Рис. 68. Грузовая тележка с захватом груза; а — крюк закрыт; б—крюк открыт.
1 - корпус; 2 - упор; 3 - тяга; 4 - крюк; 5 — механизм отвода крюка; 6 - ролики; 7 - ось крюка; 8 - катки; 9 - рычаг; 10 -телескопический шток; 11 и 12 - несущий и тяговые канаты.
Самоходная грузовая тележка фирмы Gorrett Marine. Тележка обеспечивает на волнении точный контроль положения груза на несущем канате относительно обоих судов, информация о котором передается в систему управления, устанавливающую определенную скорость движения тележки.
Самоходная тележка (рис. 69) приводится в движение по несущим канатам с помощью электродвигателя. Для подъема и опускания груза, размещенного в контейнере, она оборудуется электротельфером. С целью уменьшения массы грузовой тележки применен высокочастотный электродвигатель, работающий на частоте 400 Гц. Электродвигатели передвижения тележки и электротельфера питаются по кабелю, идущему с вьюшки судна снабжения. Движение от электродвигателя к ходовым роликам грузовой тележки передается через понижающий зубчатый редуктор, выполненный заодно со втулкой приводного шкива. Двигатель соединяется с корпусом редуктора соосно, а весь силовой блок крепится к конструкции двумя болтами.
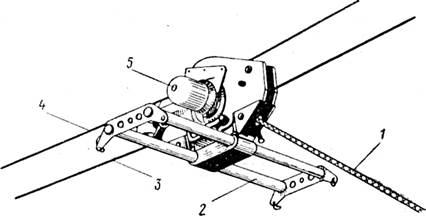
Рис. 69. Самоходная грузовая тележка. 1 — кабель; 2— траверса; 3, 4— несущие канаты; б — электродвигатель.
Самоходная тележка имеет амортизаторы, позволяющие ограничивать величину ускорения груженой тележки до 5g. С помощью электромагнитного тормоза можно останавливать ее в любой точке пути.
Приводной электродвигатель имеет две скорости, что обеспечивает повышенную скорость движения тележки (22,8 м/мин) и понижение ее (до 9,2 м/мин) при подходе к приемному посту (на расстоянии 6—9 м от него).
Система может приводиться в действие как вручную, так и автоматически. При работе вручную скорости передвижения грузовой тележки и опускания груза регулируются оператором, при этом работа может производиться только в дневное время. Автоматический способ позволяет передавать грузы в ночное время. При использовании его относительное положение судов определяется с помощью потенциометра и двух электронных тахометров один из которых установлен непосредственно на канатной лебедке и дает текущие данные относительного расстояния между судами, а другой на тележке и выдает информацию о расстоянии до места посадки груза на принимающем корабле.
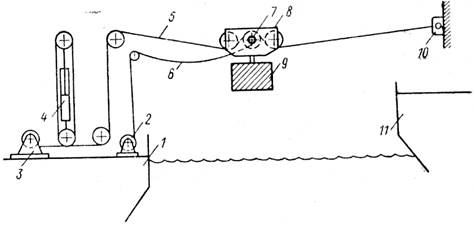
Рис. 70. Схема запасовки несущего каната (с одним несущим канатом). 1 — судно снабжения; 2, 3 — лебедки; 4 — натяжное устройство; 5 — несущий канат; 6 — кабель; 7 — электродвигатель; 8 — грузовая тележка; 9 — груэ; 10 — обух; 11 — принимающее судно.

Рис. 71. Схема запасовки несущего каната (с двумя несущими канатами). 1 — судно снабжения; 2 — вьюшка; 3 — крепление каната; 4 — лебедка; 5 — амортизатор; 6 — измеритель расстояния пролета; 7 — П-образная колонна; 8, 15 — скользящие блоки; 9, 13 — ветви каната; 10 — кабель; 11 — самоходная груэовая тележка; 12 — груз; 14 — канифас-блок; 16 — полумачта; 17 — принимающий корабль; А — расстояние до места посадки груза.
Технические характеристики устройства следующие:
Масса передаваемого груза, кг ........... 2270
Номинальное расстояние передачи грузов, м .... 45,7
Максимальное замедление (ускорение) груза, м/с2 . . 5g
Масса самоходной грузовой тележки, кг....... 1135
Управление устройством — ручное и автоматическое; устройство может работать в любое время суток, обеспечивая возможность передачи сухих и жидких грузов и проведение грузовых операций при высоте волны до 3,66 м и бортовой качке до 17°.
При запасовке несущего каната в самоходную грузовую тележку по схеме рис. 70 (с одним несущим канатом) рекомендуется передача грузов в сетках и с низко расположенным центром тяжести. Запасовка каната по схеме рис. 71 (с двумя несущими канатами) резко снижает раскачивание грузов, поэтому она рекомендуется для передачи ракет, боеприпасов и приборов.
§ 26. Устройства передвижения грузовых тележек
Как указывалось выше, передача грузов в море производится при помощи одноканатной или двухканатной дороги. В том и другом случаях применяются соответствующие устройства передвижения грузовой тележки с грузом от одного корабля к другому.
В одноканатном устройстве грузовая тележка передвигается по вытравливаемой ветви тягового каната, причем такое устройство обычно применяется для передачи легких грузов и людей.
В двухканатном устройстве грузовая тележка передвигается по отдельному несущему канату. Это устройство целесообразно применять для передачи грузов массой более 250 кг.
Раньше передвижение грузовой тележки осуществляли вручную или с помощью обычных лебедок. Это делало невозможной передачу груза при волнении моря, поскольку управлять обычными лебедками при сближении и расхождении кораблей затруднительно .
В настоящее время применяют автоматическое управление, которое обеспечивает быструю скорость перемещения грузовой тележки от судна к судну и медленный подход к приемной (передающей) головке скользящего блока.
Тележка при подходе управляется либо по скорости, либо по положению. Если выбран первый способ, то тележка движется с малой скоростью до вхождения в контакт с приемной головкой. Если выбран второй способ, то тележка будет двигаться с малой скоростью до заданного положения и полной остановки. При любом из этих способов обеспечивается контроль положения грузовой тележки относительно передающей или принимающей головки вне зависимости от качки и рыскания обоих судов. Чтобы надежно контролировать положение груза на всем пути движения тележки, обе ветви тягового каната следует туго натянуть, для этого отдающую и выбирающую лебедки необходимо привести в движение малоинерционными приводами.
Устройство передвижения грузовой тележки одноканатной дороги. В устройстве постоянно сохраняется заданное натяжение в обеих ветвях каната (выбираемого и отдающего) при расхождении, сближении, качке и рыскании судов, а также обеспечивается требуемая скорость движения грузовой тележки как с грузом, так и порожнем.
Согласно схеме устройства (рис. 72) барабан 7 приводится в Движение гидроприводом, который состоит из гидронасоса 3, гидродвигателя 9, трубопровода и клапанов. Барабан 12 приводится аналогичным гидроприводом, состоящим также из насоса 1, гидродвигателя 10, трубопровода и клапанов.
Барабаны соединены с валами лебедок фрикционными муфтами, отрегулированными на крутящие моменты, которые несколько
превышают максимальный момент, возникающий от натяжения канатов.
Селекторные клапаны пропускают к гидродвигателям больше рабочей жидкости, чем это требуется при заданной частоте вращения барабанов, чтобы обеспечить мгновенную реакцию гидродвигателей для сохранения постоянного натяжения канатов при резких движениях судов. Полученный избыток рабочей жидкости вновь поступает через предохранительные клапаны в гидронасосы 1 и 3, тем самым обеспечивая защиту гидропривода от перегрузки.
Частота вращения барабана 7 регулируется двойным реверсивным клапаном 5, через который жидкость подается к гидродвигателю 9 и отводится от него. От количества поступившей жидкости зависит частота его вращения, а следовательно, частота вращения барабана 7 во всем диапазоне скоростей в обоих направлениях.
Если в процессе передачи груза траверзное расстояние между судами не меняется, барабаны лебедок работают в разные стороны с одинаковой скоростью (со скоростью движения грузовой тележки). Если же во время движения грузовой тележки к принимающему кораблю расстояние между судами увеличивается, частоту вращения барабана 12 снижают, чтобы избежать превышения заданной величины натяжения канатов, а скорость травления каната 8 с барабана 7 увеличивают на величину снижения частоты вращения барабаном 12. Поэтому груз будет двигаться с постоянной скоростью в направлении принимающего судна; скорость движения груза при подходе к судну уменьшается, и он останавливается над палубой на заданном расстоянии от скользящего блока (независимо от качки судов).
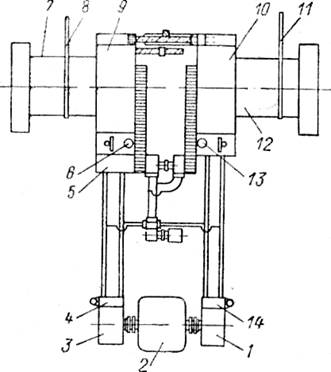
Рис. 72. Схема устройства передвижения грузовой тележки одноканатной дороги.
1и 3 — гидронасосы приводов выбирающего и вытравливающего барабанов; 2— электродвигатель; 4, 14—.селекторные клапаны; 5 — реверсивный клапан; 6, 13— предохранительные клапаны; 7 —вытравливающий барабан; 8— вытравливаемый канат; 9, 10— гидродвигатели; 11— выбираемый канат; 12— выбирающий барабан.
Устройство передвижения грузовой тележки двухканатной дороги. С помощью рассматриваемого устройства можно регулировать скорость движения грузовой тележки относительно судна снабжения и принимающего корабля, автоматически меняя натяжение ветвей тягового каната во время передачи груза вне зависимости от качки и рыскания обоих судов. Это достигается непрерывным измерением величины натяжения в обеих ветвях каната при помощи датчиков давления, сигналы от которых воздействуют на систему управления лебедками.
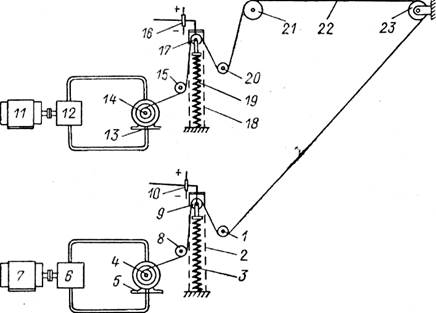
Рис. 73. Схема устройства передвижения грузовой тележки двухкапатной дороги.
1, 8, 15, 20— неподвижные блоки; 2, 18— датчики; 3, 19— пружины датчиков; 4, 14 —лебедки; 5, 13— гидродвигатели; в, 12— насосы; 7, 11— электродвигатели; 9, 17 —подвижные блоки; 10, 1в— потенциометры; 21и 23— скользящие блоки на судне снабжения и принимающем корабле; 22— тяговый канат.
Дата добавления: 2020-08-31; просмотров: 599;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
