Принимающее судно; 2 - передающее судно; 3 - кранцы; 4 — креплениекранцев. 3 глава
В устройстве применен принцип регулируемого натяжения канатной дороги, для чего в конструкцию введен измерительный канат, с помощью которого обеспечивается не только определение траверзного расстояния между судами, но и скорость изменения этого расстояния.
Измерение текущей величины траверзного расстояния автоматически вводится в систему управления (рис. 48) канатной дороги, что в совокупности с системой обратной связи существенно уменьшает такжелательные колебания груза по сравнению с другими устройствами.
Грузы подаются к постам передачи на судне снабжения с помощью роликового транспортера, который расположен вдоль борта судна.
Канадская фирма The Garrett Marine Corp. совместно с ВМФ Канады разработала и изготовила устройство с самоходной грузовой тележкой для передачи сухого и жидкого груза в море. При таком конструктивном решении отпадает необходимость в тяговых канатах и грузопередающих лебедках. Для подъема и опускания груза на палубу грузовая тележка оборудована тельфером.
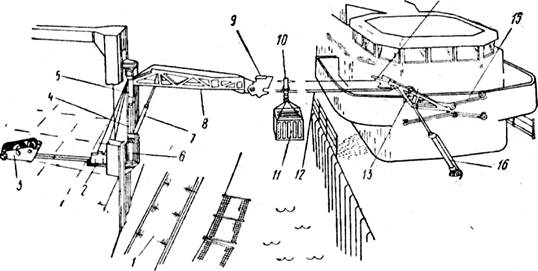
Рис. 47. Схема одноканатной дороги фирмы GEC: а — судно снабжения; б — принимающий корабль.
1 — роликовый транспортер; 2 — датчики натяжения канатов; 3— лебедка; 4 — амортизатор; 5 — рама передающего устройства; в — опора гидропривода; 7 — гидропривод качания консоли; 8 — передающая консоль; 9 — передающая головка; 10 — грузовая тележка; 11 — грузовой контейнер; 12 — измерительный канат; 13 — приемная консоль; 14 — приемная головка; 15 — опорная рама; 16 — гидропривод приемной консоли.
В системах передачи грузов с самоходной грузовой тележкой используется обычно оснастка, выполненная по схемам канатных дорог с одним или двумя несущими канатами. Схема устройства с одним несущим канатом рекомендуется при передаче грузов в сетках и грузов с низко расположенным центром тяжести, а с двумя канатами — для передачи ракет, боеприпасов и приборов. При использовании таких устройств резко снижается раскачивание передаваемого груза. Канатная дорога с самоходной грузовой тележкой с успехом эксплуатируется на канадском судне снабжения «Provider» AOR-508.
Принципиальная схема передачи сухого груза с помощью двухканатной дороги показана на рис. 49. Согласно этой схеме груз передается грузовой тележкой, которая движется по несущему канату, протянутому от передающей головки скользящего блока на судне снабжения к приемной головке 9 скользящего блока на принимающем корабле.
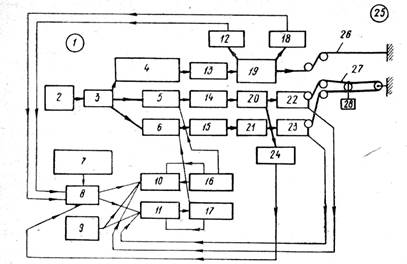
Рис. 48. Схема системы управления одноканатной дороги фирмы GEC.
1 — судно снабжения; 2 — главный электродвигатель; 3 — маховик; 4 — насос подпитки; 5, 6 — насосы приводов; 7 — регулятор скорости; 3 — контроль сигналов; 9 — установщик натяжения; 10, 11—управление наклоном шайбы; 12—тахогенератор; 13, 14, 15 — гидродвигатели; 16, 17 — актюаторы; 18 — тахометр; J9 — лебедка измерительного каната; 20, 21 — барабаны лебедок; 22, 23 — датчики натяжения; 24 — счетчик оборотов; 25 — принимающий корабль; 26 — измерительный канат; 27 — петля каната; 28 — груз.
полужирные стрелки — механические и гидравлические связи; светлые стрелки — прохождение сигналов.
Эти блоки движутся в вертикальных направляющих передающего и приемного устройств, что позволяет поднимать и опускать груз непосредственно на палубу корабля или судна снабжения. Для смягчения удара при подходе груза к приемной головке последняя снабжена амортизатором 10.
Передача людей. Для передачи людей на корабли и морские объекты (платформы, перегрузочные буи, буровые вышки и др.) применяются траверзные устройства, подобные устройствам для передачи сухих грузов. Обычно эти устройства представляют собой те же канатные дороги с силовыми агрегатами пониженной мощности. К грузовой тележке вместо груза подвешивается люлька, которая оборудована сиденьем и ремнями для пристегивания пассажира во избежание падения в воду при раскачивании.
Как правило, передача людей с корабля на корабль производится на малом Ходу при траверзном расстоянии между кораблями в пределах 30—50 м.
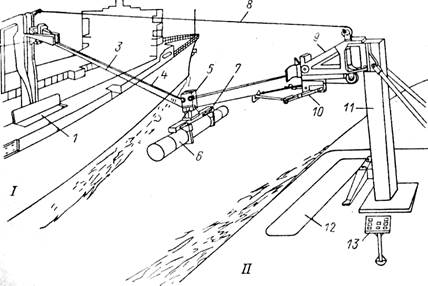
Рис. 49. Схема двухканатной дороги фирмы Vestern.
1 — судно снабжения; 11 - принимающий корабль; 1, 12 — грузовые люки; 2— скользящий блок с передающей головкой; 3,8— тяговый канат; 4 — несущий канат; 5 — грузовая тележка; в — груз; 7 — траверса; 9 — приемная головка; 10 — амортизатор; 11 — приемная колонна; 13 — пульт управлении.
Эти блоки движутся в вертикальных направляющих передающего и приемного устройств, что позволяет поднимать и опускать груз непосредственно на палубу корабля или судна снабжения. Для смягчения удара при подходе груза к приемной головке последняя снабжена амортизатором 10.
Передача людей. Для передачи людей на корабли и морские объекты (платформы, перегрузочные буи, буровые вышки и др.) применяются траверзные устройства, подобные устройствам для передачи сухих грузов. Обычно эти устройства представляют собой те же канатные дороги с силовыми агрегатами пониженной мощности. К грузовой тележке вместо груза подвешивается люлька, которая оборудована сиденьем и ремнями для пристегивания пассажира во избежание падения в воду при раскачивании.
Как правило, передача людей с корабля на корабль производится на малом Ходу при траверзном расстоянии между кораблями в пределах 30—50 м.
На случай, если грузовая тележка соскочит с несущего каната, предусмотрен предохранительный стальной трос, на котором и повиснет люлька с пассажиром. За рубежом ведутся непрерывные работы по совершенствованию принципиальных схем передачи грузов и людей траверзным способом, а также отдельных узлов и механизмов, рассмотрение которых и будет продолжено ниже.
§ 22. Передающие устройства канатных дорог
Передающее устройство устанавливается на судне снабжения и обычно состоит из следующих элементов: передающего портала или полумачты; скользящего блока; передающей головки; механизма подъема и опускания скользящего блока.
Передающие порталы М-образной или П-образной конструкции и полумачты предназначены для размещения на них скользящего блока с передающей головкой, механизма его подъема и блочной системы. Сами порталы состоят из колонн, соединенных в верхней части траверсой и закрепленных в нижней части болтами к палубной раме.
Скользящий блок представляет собой стальную раму, снабженную опорными башмаками, с помощью которых блок опирается и скользит по направляющим полозьям вертикальных колонн. На скользящем блоке устанавливается передающая головка, которая качается в горизонтальной плоскости.
Скользящий блок поднимает грузовую тележку с грузом на нужную высоту, где тележка освобождается и перемещается по несущему канату к принимающему кораблю с помощью тягового каната. При возвращении грузовой тележки блок опускает ее на палубу судна для очередной загрузки.
Передающая головка предназначена для фиксации грузовой тележки в определенном положении. Головка, поворачиваясь в горизонтальной плоскости, следует за движением несущего каната, вызванным относительным движением судов.
Механизм подъема и опускания скользящего блока по своей конструкции бывает с гидроприводом, цепным приводом или с приводом от червячной пары.
Наиболее часто встречаются механизмы подъема, обеспечивающие вертикальное перемещение скользящего блока с помощью цепной передачи, у которой нижняя цепная звездочка приводится через редуктор от электродвигателя.
Передающее устройство с порталом. Устройство с М-образным (рис. 50) или П-образным (рис. 51) порталом предназначено для передачи не только массовых грузов, но и крупных снарядов, ракет и стартовых двигателей. При этом обеспечивается безопасность в работе и такое расположение передающей головки, при котором, захватывая изделие, она держит его параллельно плоскости палубы корабля. Устройство принимает снаряд или ракету на уровне платформы погребного элеватора и поднимает его на линию передачи к принимающему кораблю.
Портал устанавливается перпендикулярно диаметральной плоскости судна снабжения. Каждая боковая сторона его состоит из двух параллельных колонн. На внутренних сторонах колонн предусмотрены направляющие для вертикального перемещения скользящего блока с передающей головкой, эти направляющие доходят до верхней части колонн, что облегчает монтаж и демонтаж скользящего блока. Для вертикального перемещения скользящего блока с передающей головкой по направляющим колонн имеется цепной привод, состоящий из звездочки и роликовой цепи, концы которой соединены со скользящим блоком.
Принцип работы передающего устройства сводится к следующему. Звездочка через редуктор приводится в действие от электродвигателя и с помощью цепи опускает скользящий блок с передающей головкой до уровня палубы, где груз, который может представлять собой торпеду или ракету, прикрепляется к держателю механизма грузовой тележки. Затем привод звездочки начинает работать в обратном направлении и поднимает скользящий блок с передающей головкой и грузом до верхнего уровня, на котором происходит его передача. После этого грузовая тележка, которая была в фиксированном положении в передающей головке, отсоединяется от последней и перемещается по несущему канату к принимающему кораблю.
Передающее устройство с посадкой грузовой тележки на упоры. На рис. 52 показано одно из устройств, узлы и механизмы которого смонтированы на полумачте. Сущность конструкции устройства заключается в том, что грузовая тележка не опускается вместе с канатами на палубу, а садится на упоры принимающей головки. Опускание груза производится с помощью каната 6.
На верхнем конце полумачты установлена передающая головка 18, предназначенная для посадки грузовой тележки и размещения блоков для несущего, грузового и тягового канатов. Головка состоит из вращающегося каркаса, который задним концом располагается в центре полумачты, опираясь на швеллеры. Каркас, в свою очередь, состоит из прочных боковых, нижних и верхних стенок. Нижняя часть головки имеет пятку, входящую в подпятник, закрепленный на швеллерах. Пятка с подпятником имеют сквозные отверстия для прохода канатов. На верхней стенке каркаса находится обух со стержнем, в который вставлен подшипник кронштейна, расположенного на одной оси с подпятником. Такое расположение их позволяет головке поворачиваться вокруг вертикальной оси в пределах, ограниченных упорами.

Рис. 50. Принципиальная схема устройства с М-образным порталом.
1 — груз; 2 — скользящий блок; 3 — грузовая тележка; 4 — тяговый канат; 5 — несущий канат; в — колонна портала; 7 — пост управления; 8, 9 — натяжное устройство несущего каната; 10 — лебедка тягового каната.

Рис. 51. Принципиальная схема передающего устройства с П-образным порталом.
1 — принимающий корабль; 2— направляющие скользящего блока; 3 — приемная головка; 4 — скользящий блок; 5 — груз; в — грузовая тележка; 7 — несущий канат; 8 — тяговый канат; 9 — скользящий блок; 10 — блок портала; 11 — портал; 12 — подвижные блоки; 13 —натяжное устройство; 14 — лебедка несущего каната; 15 — неподвижные блоки; 18 - выбирающая лебедка; 17, 18 — датчики; 19 — вытравливающая лебедка; 20 — судно снабжения.
К каркасу головки прикреплены две параллельные консоли, причем каждая состоит из нижней балки, передней стойки 4, верхней скошенной балки и средней стойки 3. На каждой консоли предусмотрена стойка 12 для направления несущего каната. Верхний край передних стоек консоли выступает в виде упора 7, образуя гнездо для удержания грузовой тележки в момент фиксации ее крайнего положения. Для этого в верхних углах грузовой тележки предусмотрены держатели.
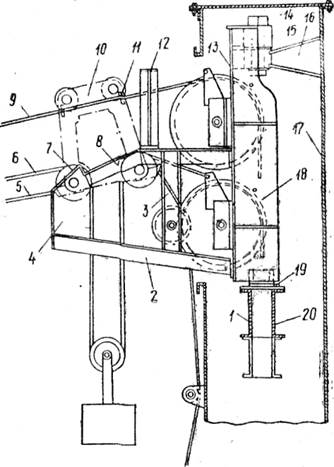
Рис. 52. Передающее устройство с размещением механизмов на полумачте.
1, 20 — швеллеры; 2 — нижняя балка; 3 — средняя стойка; 4 — передняя стойка; 5 — тяговый канат; 8 — грузовой канат; 7 — упор; 8 — верхняя балка; 9 — несущий канат; 10 — грузовая тележка; и — держатель; 12 — стойка; 13 — каркас; 14 — стержень; 15 — обух; 16 — кронштейн; 17 — полумачта; 18 — передающая головка; 19 — подпятник.
В результате провисания несущего каната грузовая тележка опускается вниз и держатели упираются в верхние скошенные балки консолей. Опускаясь ниже, тележка с держателями скользит по скосу верхней балки до тех пор, пока держатели не окажутся на упорах передних стоек, и в таком положении она находится до очередной загрузки. Чтобы снять грузовую тележку с упоров, необходимо натянуть несущий канат, после чего она сойдет с упоров и может быть подана к принимающему кораблю с новой порцией груза. Во время передачи груза вращение головки позволяет несущему канату менять направление при изменении относительного положения судов.
§ 23. Приемные устройства канатных дорог
Приемное устройство устанавливается на принимающем корабле (судне) и предназначено для приема грузовой тележки с грузом, с последующим опусканием ее на палубу для разгрузки и дальнейшей транспортировки груза в трюм, хранилище и погреба.
Принимаемая грузовая тележка с грузом находится высоко над палубой, что вызывается необходимостью натяжения несущего каната на достаточной высоте над уровнем моря. Раньше операция опускания груза выполнялась вручную с помощью различных талей, что приводило к большим задержкам в рабочем цикле, неприемлемым в нынешних условиях. Кроме того, прежние методы снятия с грузовой тележки тяжеловесных разрядных грузов не обеспечивают надежность и безопасность в работе (такие грузы, как боеприпасы, ракеты, мины и торпеды, не допускают ударных нагрузок, причем их следует подавать в точно определенное на палубе место для удобства дальнейшей транспортировки).
Простейшее приемное устройство (рис. 53) не имеет приемной головки, а грузовая тележка фиксируется тяговым канатом, лебедка которого установлена на принимающем корабле.
Современное приемное устройство, предназначенное для погрузки зенитных ракет на корабль-ракетоносец, показано на рис. 54.
Если расположение палуб и надстроек не позволяет устанавливать приемные колонны и полумачты, то используют обшивку с приваркой к ней направляющих для скользящего блока. Применение таких приемных устройств позволяет ускорить процесс передачи грузов, а также исключить появление несчастных случаев. Однако размещение этих устройств на принимающих кораблях очень затруднено из-за отсутствия свободных площадей на палубе.
Приемное устройство канатных дорог состоит в основном из следующих элементов: приемной полумачты, скользящего блока, приемной головки, механизма подъема и опускания скользящего блока.
Конструкция приемной полумачты может быть различной, но чаще всего она выполняется в виде полой полумачты или кингпоста.
В нижней части полумачта закреплена к палубе болтами, а в верхней — двумя оттяжками. Вдоль всей полумачты имеется прорезь с направляющими для скользящего блока.
Скользящий блок выполнен в виде сварной конструкции, к которой прикреплены направляющие кронштейны. В средней части блока на вертикальной оси устанавливаются приемная головка с амортизаторами, воспринимающими усилия грузовой тележки при ее подходе, а также фиксаторы для удержания тележки в определенном положении.
Механизм подъема и опускания скользящего блока электрический, работает через роликовую цепь или через винтовую пару.
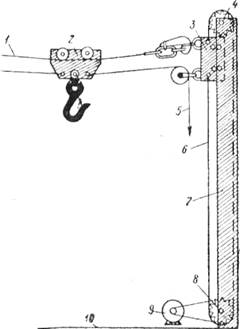
Рис. 53. Схема простейшего приемного устройства.
1 — несущий канат; г — грузовая тележка; 3 — скользящая головка; 4 — ведомая звездочка; 5 — тяговый канат; в — роликовая цепь; 7 — приемная колонна; 8 — ведущая звездочка; 9 — приводной электродвигатель; 10 — палуба принимающего корабля.

Рис. 54. Современное приемное устройство.
1 — приемная колонна; 2 — скользящий блок с приемной головкой; 3,5 — тяговый канат; 4 — несущий канат; 6 — грузовая тележка; 7 — траверса; 8 — передаваемый груз.
Приемное устройство с вильчатым подъемником. Подъемник устройства автоматически принимает груз с тележки и опускает его на палубу принимающего корабля. На рис. 55 показан общий вид приемного устройства, установленного на палубе корабля.
Устройство имеет полумачту, на верхнем конце которой установлена приемная головка, способная вращаться вокруг вертикальной оси. На приемной головке смонтирована люлька; внутри нее по направляющим ходит ползун. К люльке крепится конец несущего каната, который проходит через направляющие ролики ползуна. Такое расположение несущего каната позволяет ориентировать приемную головку независимо от перемещения судов Относительно друг друга.
Когда грузовая тележка с грузом приближается к приемной головке, она упирается в ползун и двигает его к приемной мачте. Амортизатор замедляет скорость движения тележки и останавливает ее в положении фиксации, при этом люлька и ползун блокируются под прямым углом к приемной мачте, а грузовая тележка— в положении захвата.
Для снятия груза с тележки и спуска его на палубу применен подъемник со скользящим кольцом. С помощью канатов кольцо может подниматься и опускаться. Вместе с ним поднимается и опускается рама, которая устанавливается в определенном поло-имении относительно приемной головки и блокируется с ней.

Рис. 55. Приемное устройство о вильчатым подъемником.
Рис. 56. Выдвижное приемное устройство.
1 — шахта; 2 — гнездо; 3 — стальной канат; 4 — электродвигатель; 5 — блок; в — пульт управления движением полумачты; 7 — основание; 8 — кнопочное управление; 9 — оттяжка; 10 — полумачта; 11 — скользящий блок; 12 — ролики; 13 — головка; 14 и 15 — обухи несущего и тягового канатов.
На раме подъемника предусмотрены вильчатые захваты. Когда тележка с грузом подходит к приемной головке, вильчатые захваты соединяются с поддерживающей груз траверзой. Груз автоматически освобождается, и подъемник опускает его на палубу, а тележка возвращается на судно снабжения, где она вновь загружается.
Выдвижное приемное устройство. В устройство входят выдвижная полумачта и скользящий блок для крепления несущего каната. Во время приема груза блок находится в верхней части мачты — и несущий канат поднят; при снятии груза с тележки скользящий блок опущен.
После окончания грузовой операции мачта убирается (опускается) под палубу, что очень важно для боевых кораблей. В выдвинутом положении она может поворачиваться вокруг вертикальной оси в пределах 180°, что необходимо в связи с изменением относительного положения кораблей при приеме грузов.
Как показано на рис. 56, верхняя часть выдвинутой полумачты поддерживается головкой, к которой крепятся оттяжки из стальных канатов. Для опускания полумачты под палубу применен стальной канат 3; при выдвинутой полумачте он висит свободно в шахте и прижимается держателями к блоку 5, установленному на корпусе электродвигателя. Один конец этого каната крепится анкером к нижней стороне основания 7, а другой несет обойму, за которую канат можно вытянуть на палубу.
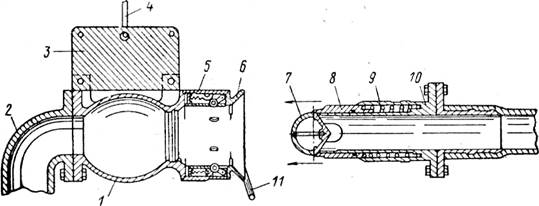
Рис. 57. Шланговое соединение перед стыковкой.
1 — корпус приемника; 2 — приемная магистраль; 3 — обух приемника; 4 — скоба; 5 — втулка; 6 — приемный конус; 7 — головка насадки; 8 — золотник; 9 — пружина золотника; 10 — корпус насадки; 11 — рукоятка ручного разъединения.
После опускания полумачты под палубу остающаяся над палубой часть механизмов закрывается кожухом.
На полумачте предусмотрены предельные выключатели для контроля за движением скользящего блока. Такие же предельные выключатели предусмотрены для контроля за подъемом и опусканием полумачты.
Приемное устройство для жидких грузов. Самым важным в таком устройстве является автоматическое соединение шланговой насадки с приемным конусом, что позволяет значительно сократить время на присоединение и разъединение шланга с приемной магистралью корабля, а также повысить надежность и безопасность работы. Для одновременной передачи двух разных жидкостей по двум шлангам сконструировано специальное двойное шлангующее устройство.
В приемном устройстве для жидких грузов проблема соединения решается надежной центровкой соединительных элементов с помощью несущего и тягового канатов.
На рис. 57 показано соединительное шланговое устройство в момент подхода шланговой насадки к приемному конусу, а на рис. 58 это же устройство после его соединения, т. е. в рабочем положении. Как видно из рисунков, соединительное устройство состоит из корпуса, прикрепленного болтами к приемной магистрали. На переднем конце его — приемный конус с расточкой для размещения прижимных колец, пружин, рычагов и роликов. Усилие пружин регулируется поворотной втулкой 5 с внутренней резьбой, на которую навинчено заднее кольцо.

Рис. 58. Шланговое соединение в состыкованном виде. Обозначения те же, что и на рис. 57.
С помощью этой втулки можно в широком пределе устанавливать величину усилия разъема шланговой насадки от корпуса. Это усилие всегда должно быть меньше разрывного усилия шланга. Для ручного отсоединения насадки предусмотрена рукоятка 11. Шланговая насадка состоит из корпуса 10 с расточкой для пружины 9, в передней части которого просверлены отверстия, а с торца установлена шаровидная головка 7. На цилиндрической части корпуса имеется золотниковый клапан, который с помощью пружины 9 закрывает отверстия для прохода жидкости.
В момент стыковки соединительного устройства насадка шланга плотно входит в корпус приемника, а золотник 8, сжимая пружину 9, отходит назад и открывает отверстия для прохода жидкости в приемную магистраль.
§ 24. Устройства натяжения несущего каната
Основная трудность, возникающая при разработке и внедрении канатных дорог, обусловлена необходимостью создания устройств натяжения несущего каната, по которому должно быть обеспечено движение грузовой тележки с судна снабжения на принимающий корабль независимо от сближения, удаления, рыскания и качки судов. При этих явлениях обе точки подвеса несущего каната непрерывно меняют свое положение в пространстве. Следовательно, рабочая длина несущего каната (пролет) также изменяется.
Для поддержания заданного натяжения в канате при одновременном изменении его длины в соответствии с изменением расстояния между точками подвеса используются специальные устройства. По способу поддержания заданного натяжения эти устройства могут разделяться на управляемые в функции самого натяжения или в функции изменения расстояния между точками подвеса канатной дороги. При этом устройства второго типа оборудуются дополнительным измерительным канатом.
Горизонтальное перемещение точек подвеса вызывается бортовой качкой и рысканием судов на курсе, а вертикальное — бортовой, килевой и вертикальной качкой.
Общее расстояние между точками подвеса (пролет) несущего каната составляет

где х1, х2 — проекции на горизонтальную плоскость амплитуд точек подвеса несущего каната соответственно на судне снабжения и корабле под действием бортовой качки; у1, у2 — проекции на горизонтальную плоскость амплитуд точек подвеса несущего каната соответственно на судне снабжения и корабле под действием килевой качки; lС — расстояние между средними траекториями точек подвеса несущего каната на идущих параллельным курсом кораблях (измеряется перпендикулярно к курсу кораблей); φ — угол опережения точки подвеса несущего каната на одном корабле относительно точки крепления его на другом; D — дрейф судна.
Положения точек подвеса несущего каната на судне снабжения и на фрегате, а также на судне снабжения и авианосце при практически возможных в рабочих условиях изменениях расстояния показаны на рис. 59. Диаграмма позволяет определить необходимую канатоемкость барабанов лебедок.
Натяжение несущего каната достигается многими способами, например, при помощи обычных и автоматических лебедок, противовесов и пневмогидравлических устройств, которые во время движения судов создают заданное натяжение при одновременном изменении длины каната, вызванного движением точек подвеса.
Как правило, используемые для этого лебедки и другие устройства, установленные на судах снабжения, подвергаются строгим испытаниям в море на эксплуатационную надежность. Такие испытания занимают много времени и требуют больших финансовых затрат. Поэтому для отработки, наладки и регулировки устройства представляется целесообразным создание берегового стенда, на котором было бы возможно проводить полные испытания устройств канатной дороги, уже смонтированных на судах или после проведенного заводского ремонта. Для этих целей испытательный стенд должен быть оборудован лебедками с программным управлением, которые способны имитировать условия, возникающие при волнении моря, и создавать необходимое натяжение в канатах.
Как показали исследования фирмы General Electrik, лебедки с управлением по расстоянию работают лучше, чем с управлением по тяговому усилию (рис. 60). Это объясняется тем, что меняющееся тяговое усилие несущего каната обусловлено в первую очередь изменением расстояния между точками его подвеса.
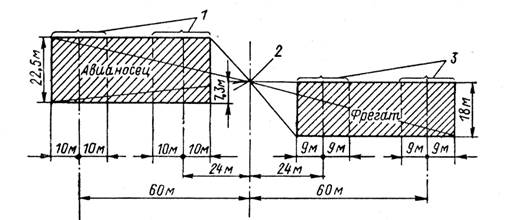
Рис. 59. Положение точек подвеса несущего каната на авианосце и фрегате (относительно судна снабжения).
1,3—границы движения точек подвеса каната соответственно на авианосце и фрегате; 2— точка подвеса на судне снабжения (принята постоянной).
При использовании этого изменения расстояния в качестве измеряющего и управляющего параметра происходит непосредственное воздействие на систему управления. При управлении по расстоянию цепь регулирования замыкается однозначно, поскольку изменение расстояния измеряется непосредственно и компенсируется вытравливанием или выбиранием несущего каната.
Конструкции канатных дорог, основанные на принципе постоянного натяжения несущего каната, работают удовлетворительно только при умеренном волнении. При повышенном волнении такая система подвержена колебаниям, резонансный период которых близок к периоду качки многих судов. Этим объясняются трудности, возникающие при передаче грузов в море на повышенном волнении, когда система входит в неконтролируемые колебания. Как правило, самое опасное положение при передаче груза (при котором частота вынужденных колебаний ближе всего к собственной частоте), когда грузовая тележка находится вблизи середины пролета. Если она остановится в этом месте, то раскачивание может стать настолько сильным, что груз перекинется через несущий канат. Колебания весьма различны но своей частоте и достаточно большая часть их присутствует в спектре колебания многих судов. Например, при передаче груза массой 2 т по несущему канату, натянутому силой 58 кН (6 т) (пролет 45 м), система имеет резонансные периоды в диапазоне 3,9— 6,6 с, а период волны в северной части Атлантического океана 5-8 с.
Раньше пытались преодолеть колебания в канатных дорогах с постоянным натяжением путем создания повышенного натяжения несущего каната и больших скоростей движения грузовой тележки с подвешенным к ней грузом. Однако оба эти способа оказались неэффективными, так как в первом случае требуются тяжеловесные, по сравнению с передаваемым грузом, приемные и передающие устройства, а во втором — мощные амортизаторы для гашения живой силы тележки с грузом, двигающиеся с повышенной скоростью.
Для демпфирования системы следует отбирать энергию от несущего каната в каждом колебательном цикле. У канатных дорог с постоянным натяжением несущего каната этого не происходит, поскольку величина натяжения каната во время всего цикла передачи груза не изменяется. Аналогичное явление характерно и для одноканатных дорог (рис. 61), где нет отдельного несущего каната и груз движется между двумя ветвями каната, образующего петлю.
В результате исследований фирмой General Electrik был принят способ, при котором обе ветви каната выбираются и вытравливаются в полном соответствии с изменениями расстояния между кораблями. Это достигается измерением скорости изменения расстояния между точками подвеса канатной дороги с помощью измерительного каната и управления лебедками в соответствии с этими изменениями. Кроме того, вводится поправка на погрешность натяжения, а степень регулирования может устанавливаться таким образом, что груз следует за вертикальными движениями кораблей, а колебания его демпфируются.
На рис. 62 показаны схема одноканатной дороги (фирмы General Electrik) с регулируемым натяжением и графики, позволяющие сопоставить ее работу с работой устройства с постоянным натяжением. Для построения графика груз перемещали на середину пролета и измеряли величину его абсолютно вертикального движения, которая слагалась из движения, обусловленного качкой судов со случайной зависимостью фаз, и движения, связанного с вертикальным перемещением груза.
Дата добавления: 2020-08-31; просмотров: 656;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
