Принимающее судно; 2 - передающее судно; 3 - кранцы; 4 — креплениекранцев. 2 глава
По окончании передачи топливо, оставшееся в трубопроводе, вытесняется морской водой, нагнетаемой с судна. Когда трубопровод целиком заполнится водой, конец его отсоединяют от судна ставят заглушку и сбрасывают в воду, где он вновь погружается на дно.
При выборе типа шланга для всплывающего трубопровода учитывается рабочее давление, объем перегрузок, радиус изгибов, положение трубопровода на дне, плавучесть и другие особенности.
Плавуче-затопляемая часть трубопровода должна иметь малую массу и хорошую гибкость, поэтому на этом участке ставятся отрезки из беспроволочного шланга.
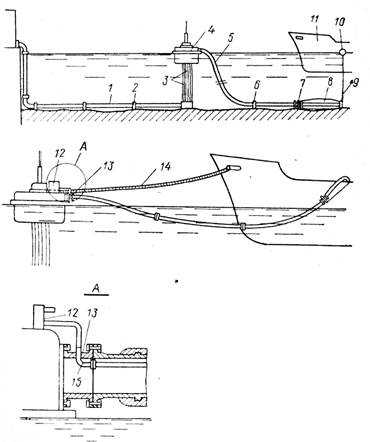
Рис. 41. Перегрузочный буй с всплывающим трубопроводом.
1 — труба; 2 — соединительная муфта; в — пучок тросов и шлангов; 4 — перегрузочный буй; 5 — всплывающий трубопровод; 6 —муфта; 7 — концевая муфта; 8 — цепь крепления конца трубопровода на судне; 9 — трос; 10 — поплавок; 11 — танкер; 12— компрессор; 13 — соединительный узел; 14 — швартовный конец; 15 — воздухопровод.
§ 18. Выводы
Несмотря на некоторое вытеснение кильватерного способа передачи жидких грузов траверзным, рассмотренный способ пока еще сохраняется на флотах капиталистических стран. В значительной мере это объясняется заключенной странами НАТО-конвенцией о составе приемопередающих устройств на кораблях военно-морских сил. Немалую роль в этом играют также его простота и надежность.
Приемопередающие устройства, необходимые для применения кильватерного способа, постоянно совершенствовались с целью увеличения их прочности, эффективности, экономичности и простоты в обращении. Устройства последних образцов в значительной мере удовлетворяют этим требованиям.
Разновидностью кильватерного способа передачи грузов является способ передачи с кормы судна на неподвижный объект. Разработка его и соответствующих приемопередающих устройств в значительной степени обусловлена целями обеспечения эксплуатации стационарных буровых вышек, а также океанографических исследовательских вышек и платформ. Такой способ передачи имеет ряд особенностей, в силу которых передающее судно, в частности, должно быть оснащено подруливающими устройствами.
Появление супертанкеров, большая осадка которых не позволяет заходить во многие порты мира, привело к созданию приемопередающих буев, вынесенных в море далеко от берега. Использование таких буев также способствует снижению опасности загрязнения морей нефтью, поскольку крупнотоннажным танкерам не требуется проходить узкости и районы с интенсивным движением, где происходит значительная часть аварий судов. В связи с этим большое значение приобретает разработка единых требований к коллекторам судовых станций приема и выдачи груза и устройствам, обеспечивающим быструю шланговку танкеров. Цель таких требований — создание эффективных соединений, обеспечивающих быструю, удобную и надежную шланговку танкера при швартовке к любому приемопередающему бую.
На состоявшемся в Лондоне (1971 г.) международном морском форуме нефтяных компаний были приняты рекомендации по стандартизации соединений коллекторов грузовых систем, устройств, обеспечивающих шланговку и освещение в районе расположения коллектора.
Глава IV
ТРАВЕРЗНЫЙ СПОСОБ ПЕРЕДАЧИ ГРУЗОВ В МОРЕ
§ 19. Общие положения
Траверзный способ передачи грузов в море, так же как и кильватерный, относится к категории бесконтактных и освоен был намного позднее последнего. При этом способе в отличие от кильватерного суда идут параллельным курсом с одинаковой
скоростью и соблюдением установленной дистанции, исключающей контакты между ними. Обычно принимающий корабль находится несколько впереди, так что угол между диаметральной плоскостью судна снабжения и канатной дорогой составляет примерно 75°.
Первые попытки применения этого способа для передачи жидкого топлива относятся к 1937 г., когда в английском флоте была проведена опытная дозаправка корабля на ходу по 75-миллиметровому шлангу, подвешенному с помощью грузовой стрелы, установленной на танкере-заправщике. Позднее, когда этот способ был освоен, на корабль с танкера стали передавать одновременно несколько шлангов, соединенных попарно в держателе, укрепленном на ноке стрелы, что позволяло передавать до 150 т топлива в час (при скорости судов 5 уз).
В ВМС США траверзный способ передачи жидкого топлива был принят на вооружение флота только в 1945 г. Первое устройство представляло собой судовую одноканатную дорогу, с помощью которой поддерживался перекинутый между судами гибкий облегченный шланг диаметром 178 мм. Такая подвеска шланга позволила увеличить траверзное расстояние между судами до 50—60 м.
К этому же времени относится появление устройств для передачи сухих грузов, и в первую очередь боеприпасов, траверзным способом с помощью канатной дороги. Этот способ характеризуется высокой скоростью передачи и достаточной безопасностью для личного состава.
Передача грузов (как жидких, так и сухих) производится с помощью одно- или двухканатных судовых дорог, на расстояние между точками подвеса которых, несмотря на стремление к сохранению дистанции между судами, оказывают влияние все виды качки, а также рыскание судов по курсу. Чтобы предотвратить возможные из-за этого провисания и рывки в канатах, предпринимается ряд конструктивных мер, которые в основном сводятся к тому, что один конец канатной дороги крепится за приемную головку подвижного блока на принимающем корабле, а другой — к натяжному устройству, установленному на судне снабжения.
В первых канатных дорогах для этого использовались обычные стандартные лебедки мощностью до 50 л. с, способные создавать натяжение в несущем канате до 36 кН (3,5 т). Такие же лебедки устанавливались и для перемещения грузовой тележки. Управление лебедками было ручное, что приводило к частым аварийным случаям.
Позднее нашли применение лебедки и устройства с гидравлическими и гидропневматическими приводами, которые обеспечивали автоматическое натяжение несущего каната при изменении нагрузки или перемене взаимного расположения судов во время передачи грузов на ходу.
В качестве натяжных устройств на судах снабжения ВМФ Англии используют два типа электрических лебедок с автоматическим регулированием натяжения канатов.
В лебедке первого типа постоянный вращающий момент электродвигателя передается на барабан с помощью электромагнитной муфты скольжения, изменение момента которой (а значит, и натяжения каната) достигается путем изменения возбуждения ее обмотки.
В лебедке второго типа вместо электромагнитной муфты скольжения используется генератор, обеспечивающий различную скорость вращения реверсивного электродвигателя постоянного тока по схеме генератор — двигатель.
Второй тип лебедки наиболее предпочтителен, поскольку имеет следующие преимущества:
— меньшая инерция, а значит, более быстрая реакция на изменения натяжения каната;
— большая скорость выбирания и травления каната;
— лучшее реагирование на усилия в канате при передаче легких грузов или порожней грузовой тележки.
Устройства с автоматическим регулированием натяжения канатов обеспечивают эластичную связь между судами и допускают управление грузом или шлангом как во время передачи, так при подъеме или опускании груза на палубу корабля, что увеличивает скорость передачи.
Опыт практического применения устройств с автоматическим натяжением канатных дорог показывает, что эти устройства не оказывают отрицательного влияния на управляемость судов при проведении перегрузочной операции на ходу.
Современные зарубежные конструкции судовых канатных дорог позволяют производить передачу груза массой до 5 т при траверзном расстоянии между судами в пределах 50—60 м.
Траверзный способ позволяет вести передачу груза с обоих бортов судна снабжения на два корабля одновременно. Однако повышенная уязвимость при атаках противника и опасность столкновения судов, связанных вместе сложным передаточным устройством (канатной дорогой) и телефонными линиями, требуют максимального сокращения времени их совместного движения.
Следующие факторы в той или иной степени определяют успех пополнения запасов в море и существенно влияют на скорость проведения операции по передаче грузов:
— состояние моря (погода);
— рациональное размещение приемопередающих постов;
— быстрота подачи грузов в трюм под люк принимающего корабля;
— длительность нахождения поднятого из трюма груза на верхней палубе судна снабжения;
— тип и удельная кубатура груза.
§ 20. Некоторые вопросы взаимодействия кораблей при передаче грузов
Близость кораблей друг к другу при передаче грузов траверзным способом на ходу и наличие связывающего звена (несущего каната) между ними вызывают необходимость в исследованиях ряда вопросов их гидродинамического взаимодействия.
Из достаточно обширного круга этих вопросов в зарубежных исследованиях наибольшее внимание уделяется вопросам устойчивости и управляемости движущихся в непосредственной близости кораблей; остойчивости передающего и принимающего кораблей в момент передачи груза; взаимной качки кораблей на волнении.
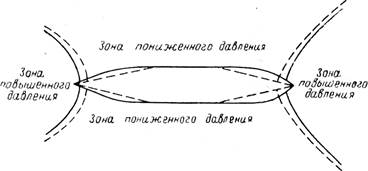
Рис. 42. Распределение зон давлений на корпус судна при его движении.
Для решения каждого из этих вопросов используются как теоретические, так и экспериментальные методы. Анализ указанных решений позволяет сделать ряд общих выводов, которые кратко могут быть сведены к следующему.
Сложность управления кораблями, движущимися параллельным курсом на небольшом расстоянии друг от друга, обусловливается воздействием на них гидродинамических сил притяжения и отталкивания. Пренебрежение влиянием этих сил может повлечь за собой столкновение судов.
Экспериментальное исследование гидродинамического поля вблизи судна, идущего в открытом море, доказывает, Что изменение величины давлений возникает на достаточно большом расстоянии от его корпуса. При этом в носовой части корпуса создается зона повышенного давления, в средней части давление становится пониженным, а в кормовой вновь повышается, но остается меньшим, чем в носовой части (рис. 42). Зоны повышенного давления в носовой и кормовой частях судна образуют носовую и кормовую волны, которые вызывают отталкивание судов, а зона пониженного давления в средней части вызывает их притягивание («присасывание»).
При движении двух или более судов параллельным курсом строем фронта происходит взаимодействие их полей давления, вызывающее появление на корпусах поперечных сил (притяжения или отталкивания) и соответствующих моментов в плоскости рыскания.
Явление взаимного гидродинамического воздействия судов возникает из-за изменений поля скоростей и, следовательно, поля давлений в жидкости, вызванных движущимися судами.
Величины сил и моментов, а также их направление изменяются в зависимости от размеров и формы корпусов судов, их скоростей, курсов, влияния работы гребных винтов и глубины.
Приближенно можно считать, что силы и моменты, действующие на каждое судно, изменяются пропорционально скорости хода и обратно пропорционально траверзному расстоянию между ними.
В идеальном случае гидродинамические давления уравновешиваются между собой, что не влечет каких-либо нежелательных последствий. В большинстве же случаев возникающие на судах силы могут быть уравновешены только путем соответствующих перекладок руля, или, другими словами, управлением судами.
Теоретическое определение сил, действующих на корабли при их движении на близком расстоянии друг от друга, крайне затруднительно (см. § 45), поэтому наиболее реальным считается метод модельного эксперимента. При этом рассматриваются три ситуации: подход корабля; движение кораблей при проведении операций перегрузки; отваливание корабля. Согласно результатам модельных испытаний в первый момент, т. е. когда один корабль начинает нагонять другой, нос догоняющего входит в зону повышенного давления в районе кормы догоняемого, что вызывает его отталкивание.
По мере того как корабли становятся в строй фронта, из-за наличия зон пониженного давления в районе средней части корпусов на них начинают действовать силы притяжения («прилипания»). Для момента отваливания корабля от судна снабжения опять становится характерным появление сил отталкивания.
Получаемые в результате проведения модельных испытаний графики величин сил в моментов, действующих на корабли, используются для определения положения рулей, с помощью которых обеспечивается удержание параллельных курсов судов.
Средние величины углов перекладки рулей, установленные на основании результатов модельных испытаний, в натурных условиях претерпевают, как правило, некоторую корректировку. Значения их зависят от типов и скоростей взаимодействующих судов. Эксперименты показали, однако, что для всех рассмотренных кораблей в диапазонах скоростей хода 10 уз (даже при уменьшении расстояния между Ними до 15 м) углы перекладки рулей остаются в пределах средних величин, а экстремальные углы не превышают 35°.
Эксперименты показали также, что наибольшая вероятность столкновения судов появляется во время занятия ими положения для траверзной передачи грузов и отхода друг от друга.
Представляют интерес исследования, проведенные в научно-исследовательском институте ВМФ Англии, которые проводились в соответствии с требованиями, предъявляемыми к судам при передаче топлива в море на ходу с танкеров-заправщиков на корабли.
Испытания проводились на моделях в масштабе 1 : 50, одна из которых (А) представляла линейный корабль «King George V», другая (В) — танкер-заправщик «01nа», имеющих следующие основные характеристики:
Корабль А Судно В
Длина по ватерлинии, м....... 226 173
Ширина, м............. 31,4 21,3
Осадка, м.............. 8,9 9,1
Водоизмещение, т.......... 36 890 23 570
Коэффициент общей полноты .....0,611 0,714
На графиках (рис. 43, 44) в безразмерном виде показан характер изменения сил и моментов, действующих на суда при траверзных расстояниях между ними 15,2 и 30,5 м, когда корабль А нагоняет судно В с расстояния 183 м в корму и обгоняет его до 183 м по носу.
Из результатов испытаний следует, что по мере того как нос корабля А начинает перекрывать корму судна В, появляется сила отталкивания корпусов, достигающая максимальной величины, когда нос корабля А находится на одной линии с мидель-шпангоутом судна В; равная нулю, когда носы обоих кораблей сравняются, и превращающаяся в силу притяжения (т. е. меняет знак), которая достигает максимальной величины при расположении судов по траверзу. По мере того как корабль А начинает обгонять судно В, происходит обратное изменение сил. Действительные силы притяжения на суда, представленные в моделях А и В, составляют (как показали натурные испытания) 255 кН (26 т) на корабль А и 343 кН (35 т) на судно В, когда они идут параллельным, курсом со скоростью 10 уз при траверзном расстоянии 15,2 м.
При увеличении расстояния до 30,5 м эти силы уменьшаются вдвое, а при увеличении скорости судов до 20 уз силы возрастают в четыре раза.
Характер изменения моментов в плоскости рыскания сходен с действием гидродинамических сил.
По результатам исследований сделаны следующие рекомендации, которые необходимо учитывать при проведении операции передачи грузов в море траверзным способом:
— подход корабля к судну снабжения в положение приема груза предпочтительнее с траверза, чем с кормы или под углом, так как при этом приближающийся корабль не сносит (в нос или корму); однако поскольку подходы с кормы или под углом осуществляются быстрее, рекомендуется ими пользоваться малым кораблям, обладающим большей маневренностью;
— отход корабля целесообразно выполнять путем перехода на другой курс при сохранении или понижении скорости; для малых кораблей приемлемым считается отход путем снижения скорости на параллельном курсе;
— маневры, связанные с подходом и отходом судов, а также с сохранением положения для передачи груза при умеренном волнении, могут осуществляться на скоростях 12—20 уз.
Необходимо учитывать следующее: если сила давления на руль недостаточна для того, чтобы уравновесить силу гидродинамического взаимодействия, и траверзное расстояние при этом мало, то столкновение судов неизбежно.

Рис. 43. График сил и моментов, возникающих при обгоне одного судна другим (траверзное расстояние 15,2 м).
А — обгоняющее судно; В — обгоняемое судно; 1 — момент у судна В; 2 — сила у судна В; 3 — сила у судна А; 4 — момент у судна А.
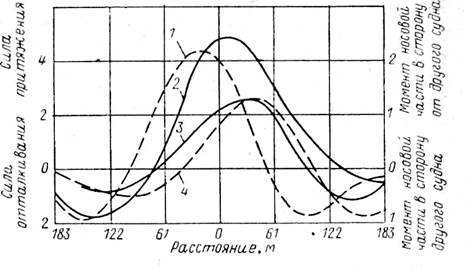
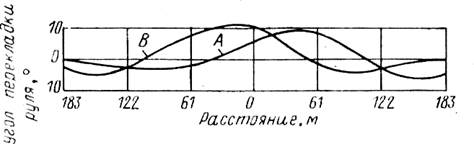
Рис. 44. График сил и моментов, возникающих при обгоне одного судна другим.
Траверзное расстояние 30,5 м; обозначения те же, что и на рис. 43.
§ 21. Устройства для передачи грузов
В настоящее время за рубежом разработаны и применяются различные устройства передачи грузов в море траверзным способом.
В основном они подразделяются на устройства для передачи жидких и сухих грузов и людей.
Передача жидкого груза. Для траверзной передачи жидкого груза существует несколько разновидностей устройств, отличающихся способом натяжения несущего каната, поддержания шланга, количеством оттяжек и т. д.
Все эти разновидности можно свести в основном к двум: для передачи груза с помощью канатной дороги или специально оборудованных грузовых стрел (см. рис. 7, в). Как видно из рисунка, передача с помощью канатной дороги применена по
правому борту. При этом способе грузовая стрела устанавливается в вертикальное положение и масса шланга воспринимается несущим канатом, а тяговые канаты, проходящие через блоки, подвешены к верхней части стрелы и регулируют положение шланговых кареток на несущем канате. В другом случае (как показано по левому борту) стрела вываливается за борт и масса шланга воспринимается тяговыми канатами.
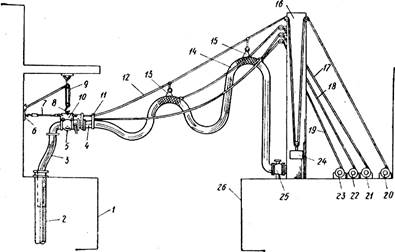
Рис. 45. Траверзное устройство с противовесом.
1 — принимающий корабль; 2 — приемный патрубок; 3 — гибкий шланг; 4 — шланговая насадка; 5 — соединительная муфта; в, 10 — обухи; 7 — оттяжка; 8— скоба; 9 — таль; 11 — роликовая каретка; 12 — несущий канат; 13, 15 — подвески; 14 — шланг; 1в — полая полумачта; 17, 18, 19 — оттяжки; 20, 21, 22, 23 — лебедки; 24 — контргруз; 25 — вентиль; 26 — судно снабжения.
Топенант стрелы травится до тех пор, пока нагрузка не передается на постоянный штагкарнак, что будет свидетельствовать о правильном угле наклона стрелы.
При любом из этих способов используют четыре лебедки: одна лебедка обслуживает топенант или несущий канат, другая — тяговые канаты и две предназначены для обслуживания оттяжек.
На рис. 45 показана общая схема устройства для передачи жидких грузов траверзным способом. Это устройство состоит из несущего каната, натяжение которого осуществляется контргрузом, расположенным в полой полумачте. В рассматриваемом устройстве имеется соединительная муфта, расположенная на принимающем корабле, и шланговая насадка, находящаяся на конце шланга.
К соединительной муфте крепится отрезок гибкого шланга, который вставляется в приемный патрубок, ведущий к корабельным танкам.
Соединительная муфта имеет на своем корпусе обух со скобой под гак тали. Для подъема соединительной муфты в рабочее положение служит таль. К обуху 10 крепится оттяжка, противоположный конец которой зацепляется гаком за другой обух 6, расположенный на надстройке корабля. Насадка шланга поддерживается на несущем канате с помощью роликовой каретки. Пролет шланга поддерживается подвесками 13 и 15, которые ходят по несущему канату, конец которого, идущий на лебедку 20, запасован в блок контргруза 24, что обеспечивает автоматическое натяжение каната при качке кораблей. Оттяжки 17, 18, 19 крепятся к подвескам шланга и посредством лебедок 21, 22, 23 выдают либо выбирают шланг.
Способ поддержки соединительной муфты 5 позволяет центрировать ее с шланговой насадкой 4 в момент их соединения. Центровка осуществляется следующим образом. Подняв соединительную муфту в рабочее положение с помощью тали, прикрепляют оттяжку 7 к обуху 6, а несущий канат — к обуху 10. Затем лебедкой 20 натягивают несущий канат, который образует одну линию с обухом 10 и оттяжкой 7, что обеспечивает центровку соединительной муфты 5 с шланговой насадкой в момент соединения.
Процесс траверзной передачи жидких грузов слагается из следующих этапов:
— судно снабжения ложится на заданный курс и идет с согласованной скоростью;
— принимающий корабль догоняет судно снабжения и занимает установленное место на его траверзе;
— с судна снабжения на корабль подается трос-проводник, с помощью которого выбирается несущий канат;
— по несущему канату с помощью оттяжек перемещаются каретки, к которым подвешен шланг;
— после подсоединения шланга к магистрали корабля начинается передача топлива.
Эффективность работы по передаче жидкого груза зависит от производительности насосов, сечения и длины шлангов, сечения труб приемной магистрали и ряда других факторов. После прекращения приемки груза на судно снабжения в первую очередь возвращается шланг, а затем весь остальной такелаж.
При установке па судне снабжения нескольких устройств можно передавать жидкие грузы одновременно с обоих бортов. Наибольшее распространение находят устройства, позволяющие одновременно заводить с танкера-заправщика на корабль по два и более шланга.
Передача сухого груза. Для передачи сухих грузов траверзным способом наиболее эффективными оказались канатные дороги, среди которых различают одно- и двухканатных. Первые имеют только один канат, объединяющий в себе функции несущего и тягового. Двухканатные дороги имеют два рода канатов: несущий (для поддержания груза), по которому катятся ходовые ролики грузовой тележки, и тяговый (для передачи груза), с помощью которого обеспечивается движение тележки.
В обоих случаях грузовые тележки совершают реверсивное движение вперед и назад по одной линии между судном снабжения и принимающим кораблем.
Принципиальная схема таких устройств не отличается от схемы устройств для передачи жидкого груза. Однако в этом случае к несущему канату вместо шланга подвешивается грузовая тележка со специальной люлькой или контейнером, которая с помощью тяговых канатов перемещается вдоль несущего каната от судна снабжения к принимающему кораблю и обратно.
Стремление к созданию автоматической системы передачи грузов в море на ходу, не требующей высококвалифицированного обслуживания, было положено в основу разработки фирмой Vickers новой одноканатной дороги с автоматическим устройством, работающим по заранее введенной в систему управления программе (рис. 46).
Устройство состоит из пульта управления, электронной системы и датчиков положения и скорости. Оно позволяет передавать грузы с судна снабжения на корабли, имеющие специальные приемные посты, и на корабли, не имеющие этих постов. В первом случае, конечно, скорость передачи больше. В обоих случаях все техническое оборудование устройства, кроме приемного поста, монтируется на- судне снабжения.
При наличии на корабле специального приемного поста грузы подаются точно в назначенное место, а при отсутствии такого поста точность подачи составляет ±0,3 м от намеченного места. Это достигается с помощью двух датчиков — датчика скорости и датчика положения грузовой тележки, установленных на вертлюжных блоках, через которые проходят тяговые канаты. Пружинные потенциометры этих датчиков воспринимают всякое отклонение груза от заданного положения и передают выработанные сигналы на главные насосы и электромуфты Нулевое положение потенциометров устанавливается при первой подаче груза, которая проводится вручную обеих лебедок, тем самым корректируя положение грузовой тележки.
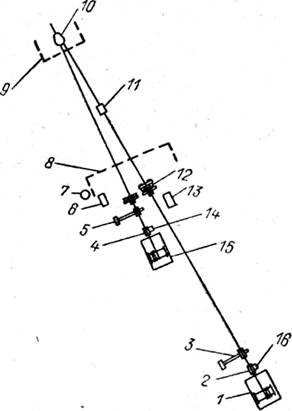
Рис. 46. Схема одноканатной дороги фирмы Vickers.
1, 15 — тяговые лебедки; 2, 4 — вертлюжные блоки; 3,5 — линейные датчики; 6 —пульт оператора; 7 — место оператора; 8 — судно снабжения; 9 — принимающий корабль; 10 — приемная головка; 11 — передаваемый груз; 12 — передающая головка; 13 — программный механизм; 14, 16 — датчики скорости и положения груза.
В процессе работы величина натяжения каната поддерживается автоматически, для чего система передачи грузов оборудована датчиком натяжения, который измеряет величину сдвига и посылает сигналы, пропорциональные величине натяжения каната, в систему управления лебедками. По этим сигналам срабатывает система автоматического регулирования, в результате чего сила натяжения каната приводится к заданной величине, которая и поддерживается на всех стадиях передачи грузов. Реакция автоматической системы регулирования достаточно быстрая, но в момент пиковой нагрузки происходит повышение давления в гидросистеме до 150% номинального. Однако этот пик давления рассеивается за 0,15 с, что вполне допустимо.
Грузы на принимающий корабль передаются с достаточно большой средней скоростью, причем максимальная скорость после разгона достигает 274 м/мин. Перед подходом грузовой тележки к приемной головке она переходит на малую скорость, с которой и начинает двигаться до заданного положения. Силу торможения и величину пути, на котором происходит снижение скорости, можно регулировать, что исключает повреждение грузов вследствие чрезмерных сил, возникающих от отрицательного ускорения при торможении.
Обычно скорость грузовой тележки при подходе к приемной головке устанавливается порядка 60 м/мин (величина регулирования находится в пределах 0—122 м/мин).
Изменение скорости движения груза, обусловленное качкой и рысканием кораблей, автоматически компенсируется изменением скорости канатов с помощью тяговых лебедок.
Пульт управления, находящийся на палубе судна снабжения, позволяет оператору установить систему на автоматический режим работы, после чего вести наблюдение за скоростью движения груза, его посадкой на палубу принимающего корабля, за величиной натяжения канатов и показаниями приборов.
Главной частью системы управления является электронное устройство, работающее по заданной программе и обеспечивающее полную автоматизацию процесса передачи груза. Это устройство смонтировано в подпалубном помещении и состоит из отдельных блоков, залитых эпоксидной смолой, что предохраняет его от сотрясений и потери сопротивления от воздействия влаги, в результате повышается надежность в работе.
Система управления спроектирована с учетом использования ее на лебедках постоянного натяжения, уже находящихся в эксплуатации на судах снабжения. Поэтому путем подключения к лебедкам программирующего устройства, датчиков и пульта управления можно превратить обычное устройство для подачи грузов в устройство автоматическое.
Рабочая жидкость для гидродвигателей, приводящих в движение лебедки, подается поршневыми насосами переменной производительности. Производительность каждого насоса составляет 340 л/мин. В длительном режиме насос работает с частотой вращения 1800 об/мин, создавая при этом рабочее давление в системе гидравлики 2 МПа (210 кгс/см2). При кратковременных перегрузках частота вращения достигает 2000 об/мин, а давление в системе гидравлики повышается до 2,25 МПа (230 кгс/см2).
Насосы оборудованы сервомоторами с потенциометрами обратной связи (от барабанов лебедок и тормозов к перепускным байпасам с электрическими тригерами), что позволяет системе устанавливаться в нейтральное положение при различных аварийных ситуациях и возникновении неисправностей в системе управления. В момент торможения насосы переходят на режим работы гидравлических двигателей.
Основные данные устройства фирмы Vickers следующие:
Максимально допустимое расстояние между судном снабжения и принимающим кораблем, м.............. ........183
Наибольшее расстояние передачи груза, исключающее перенастройку системы, м......... ..... ..... ..... ..... ..... ..... .....92
Наибольшая скорость грузовой тележки после разгона, м/мин............. ..... ..... ..... ..... ............ ..... ..... ..... ..... .....274
Пределы регулирования скорости подхода грузовой тележки к приемной головке, м/мин..... ..... .......... ..... ..... .......0—122
Средняя скорость подхода грузовой тележки к приемной головке, м/мин................ ..... ..... ..... ..... ..... ..... ..... ..... .....61
Максимальное компенсируемое ускорение от качки и рыскания, м/с2 ................. ..... ..... ..... ..... ..... ..... ..... ..... ..... ..3
Из одноканатных дорог заслуживает внимания устройство с качающимися консолями, разработанное в Англии (рис. 47). Это устройство значительно отличается от других известных канатных дорог главным образом методом подъема и опускания груза на палубу судна. Обычно для этого используются скользящие блоки, а здесь применен метод качания передающей и приемной консолей, на концах которых имеются автоматические фиксаторы для грузовой тележки. При подходе тележки к одной из консолей срабатывает гидропривод и груз опускается на палубу.
Дата добавления: 2020-08-31; просмотров: 623;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
