Управления дорожным движением
Стратегия управления дорожным движением представляет собой комплекс воздействий, направленных на достижение конечной цели - повышение экономической эффективности перевозок, удобства и безопасности движения, пропускной способности дорог. Стратегия управления включает в себя воздействия на дорожные условия с целью обеспечить состояние дороги, удовлетворяющее требованиям движения, на организацию движения, транспортный поток и режим движения.
Наиболее эффективные управляющие воздействия: рекомендованные скорости по участкам магистрали и полосам движения, разрешение или запрещение смены полос, назначение режимов регулирования въездов, указания дорожной службе и т.д.
В основу управления дорожным движением на магистрали могут быть приняты два стратегических положения:
• повышение средней скорости, пропускной способности и безопасности движения;
• перераспределение транспортных потоков на сеть прилегающих дорог.
Оптимальное управление на одном участке может оказаться неоптимальным для других участков, поэтому, выбирая стратегию управления, необходимо рассматривать координированный набор управлений для автомобильной магистрали в целом или для крупных участков, т.е. осуществляют так называемое программное управление.
Задача нахождения на каждом шаге управления оптимального набора решений, параметров и команд - главная в системе управления. За шаг, или интервал, принимают отрезок времени, в течение которого управляющие параметры не меняются.
Важный момент при определении стратегии управления движением - выбор критериев регулирования, т.е. основных показателей работы системы, которые должны быть главными в определенных условиях.
219
Первый случай - час пик. Когда уровень загрузки выше оптимального, в нормальных условиях движения критерием регулирования будет пропускная способность, поэтому и режим движения как на дороге в целом, так и на отдельных полосах (прежде всего скорость) назначают, исходя из обеспечения максимальной пропускной способности дороги.
Соответственно устанавливают ограничения на въезд на автомобильную магистраль, как по числу, так и по составу автомобилей.
Второй случай, когда уровень загрузки ниже оптимального, движение на дороге свободное, а условия движения благоприятные. Здесь за критерий регулирования принимают минимум времени нахождения автомобиля в системе и скорость назначают максимально допустимой для каждой полосы движения и типа автомобиля; ограничения на въездах отсутствуют.
Третий случай, когда критерием регулирования служат требования обеспечения безопасности движения, имеет место при наличии неблагоприятных факторов и ночью. Скорость может быть и ниже, чем необходимо для обеспечения минимума нахождения автомобиля в системе или максимальной пропускной способности дороги. В этом случае могут быть также наложены ограничения на въезд автомобилей на автомобильную магистраль, как по числу, так и по составу.
Важнейший этап разработки стратегии управления - формирование математической модели транспортного потока (ТП), находящегося под воздействием дорожных и метеорологических условий (ДУ) и средств управления, которая должна адекватно описывать внутренние связи в системе ДУ-ТП (рис. 18.11).
При разработке математической модели управляемого транспортного потока исходят из того, что взаимодействие системы ДУ-ТП может быть описано основной диаграммой транспортного потока, которая связывает воедино дорожные и метеорологические условия, средства управления и режимы движения транспортного потока, т.е. входные и выходные параметры комплекса ВАДС.

Рис. 18.11. Схема внутренних связей в системе ДУ-ТП
220
Основная диаграмма транспортного потока подразумевается как множество возможных при данных дорожных и метеорологических условиях состояний транспортного потока, т.е. троек параметров:  - интенсивность,
- интенсивность,  - плотность,
- плотность,  - скорость потока:
- скорость потока:

Распределение желаемых скоростей автомобилей определяется составом движения, эксплуатационными характеристиками автомобилей и психофизиологическим состоянием водителей. Желаемая скорость не связана с определенным участком дороги, а характеризует возможности автомобиля и намерения водителя.
В зависимости от распределения желаемых скоростей и указаний, данных средствами управления, формируется один из допустимых в рамках данной диаграммы режимов движения на данном участке магистрали. Режим движения характеризуется плотностью потока на участке и функциями распределения фактических, т.е. вынужденных, скоростей.
Рассматривая основную диаграмму транспортного потока (рис. 18.12) как множество сочетаний параметров  , отметим, что граница области допустимых состояний
, отметим, что граница области допустимых состояний  может быть задана функцией
может быть задана функцией  . Тогда сама эта область будет обозначаться
. Тогда сама эта область будет обозначаться  . Касательная к кривой в нуле задает скорость свободного движения в тех условиях, для которых построена диаграмма
. Касательная к кривой в нуле задает скорость свободного движения в тех условиях, для которых построена диаграмма
Значение  , для которого
, для которого  (точка С) представляет собой критическую плотность потока
(точка С) представляет собой критическую плотность потока  Проекция точки пересечения кривой с прямой
Проекция точки пересечения кривой с прямой 
(точка D) на ось абсцисс - максимальная плотность потока  , для которой данная скорость хотя бы теоретически может быть достигнута.
, для которой данная скорость хотя бы теоретически может быть достигнута.
Горизонтальную касательную к кривой в точке В обычно трактуют как линию уровня теоретической пропускной способности. Это истолкование правильно лишь в том случае, когда функция распределения желаемых и фактических скоростей сосредоточена в интервале 
 . Если желаемые или фактические скорости сосредоточены ниже
. Если желаемые или фактические скорости сосредоточены ниже  , например, перевозка негабаритных грузов, ограничение скорости из-за неровности покрытия и т.п., пропускная способность не может быть достигнута даже теоретически.
, например, перевозка негабаритных грузов, ограничение скорости из-за неровности покрытия и т.п., пропускная способность не может быть достигнута даже теоретически.
221
Обычно диаграмма изображается как огибающая точек плотности и интенсивности при средних скоростях транспортного потока.
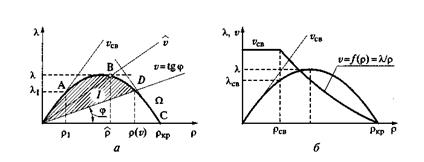
Рис. 18.12. Диаграмма транспортного потока:
а – основная; б – основная с производной; 1 – опасная зона при 
А – точка, соответствующая концу участка на диаграмме со свободной скоростью, которая возможна при движении потока с плотностью не более  ; В – точка оптимальной (наибольшей) пропускной способности , которой соответствует значение плотности
; В – точка оптимальной (наибольшей) пропускной способности , которой соответствует значение плотности  ; D – точка пересечения границы области допустимых состояний с прямой , т.е. точка, при которой плотность достигает величины ; точка С соответствует критической плотности
; D – точка пересечения границы области допустимых состояний с прямой , т.е. точка, при которой плотность достигает величины ; точка С соответствует критической плотности  , после которой начинается затор;
, после которой начинается затор;  - угол между осью плотности и скоростью потока, возможной при данной плотности;
- угол между осью плотности и скоростью потока, возможной при данной плотности;  - параметры свободного движения
- параметры свободного движения
Однако фактически скорости при эталонном состоянии дороги и метеорологических условий колеблются в широких пределах, но чем больше плотность, тем меньше размах колебаний. Это свойство объясняет еще одну особенность транспортного потока: при наличии какого-либо ограничения по скорости или плотности не исключается возможность движения со скоростями или плотностями выше (или ниже) установленных пределов.
Кроме основной может быть построена производная диаграмма транспортного потока, которая представляет собой график скорости при данной плотности .
Если основная диаграмма задана функцией  , то производная диаграмма – функцией
, то производная диаграмма – функцией  при данном значении
при данном значении  .
.
Таким образом, производная диаграмма  выражает характер изменения скорости при изменении плотности в данных условиях движения.
выражает характер изменения скорости при изменении плотности в данных условиях движения.
Дорожные условия воздействуют не только на скорость свободного движения: такие факторы, как сужение проезжей части, ухудшение сцепления и другие, изменяют все множество состояний транспортного потока, т.е. изменяют форму основной диаграммы транспортного потока.
222
Установлено, что каждому состоянию дороги и метеорологических условий соответствуют свои оптимальные значения основных параметров в рамках основной диаграммы транспортного потока, т.е. в каждом случае происходит деформация основной диаграммы транспортного потока, вследствие чего существенно сокращается число допустимых сочетаний параметров функционирования системы ДУ-ТП (троек  ). При этом могут быть выделены три вида деформации основной диаграммы транспортного потока (рис. 18.13).
). При этом могут быть выделены три вида деформации основной диаграммы транспортного потока (рис. 18.13).
Первый вид - деформация происходит вследствие ограничения каким-либо фактором скорости при отсутствии ограничений по плотности. Ее можно назвать деформацией по скорости. При этом площадь основной диаграммы транспортного потока, построенной для эталонных условий на данном участке, сокращается слева и сверху. Деформация по скорости наиболее вероятна при сокращении ширины проезжей части и укрепленных обочин, ухудшении ровности покрытия и увеличении сопротивления движению при воздействии ветра.
Второй вид деформации имеет место, когда по каким-либо причинам ограничивается интервал между движущимися автомобилями, т.е. ограничивается плотность потока . Эта деформация называется деформацией основной диаграммы транспортного потока по плотности. При этом ее площадь сокращается справа (например, при перевозке опасных грузов).
Третий вид – деформация основной диаграммы по скорости и плотности одновременно. Под воздействием одного или более факторов происходит одновременное снижение допустимой или фактической скорости и увеличение интервалов между автомобилями (уменьшение плотности). Площадь основной диаграммы ограничивается слева, сверху и справа. Этот вид деформации наиболее распространен и вероятен при снижении коэффициента сцепления во время дождя, снегопада, метели, гололеда, тумана и других метеорологических явлений, а также при их сочетаниях.
Таким образом, на одном и том же участке может наблюдаться множество состояний транспортного потока и множество значений выходных параметров системы ДУ-ТП.
Эта математическая модель положена в основу алгоритма управления движением. Суть управления в системе АРДАМ состоит в том, что на основании информации, поступающей от датчиков интенсивности, плотности и скорости движения
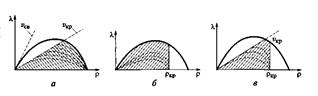
Рис. 18.13. Деформации основной диаграммы транспортного потока:
а - по скорости; б - по плотности; в - по скорости и плотности
223
и дискретно о состоянии дороги и метеорологических условиях, координационно-вычислительный центр выдает команды о рекомендуемых режимах движения на каждом участке и по каждой полосе автомобильной магистрали, которые реализуются через управляемые знаки и системы.
Транспортный поток дифференцируется по скоростям на каждой полосе, производится дросселирование скоростей вдоль автомагистрали, закрытие ее отдельных полос или участков и т.д.
На пересечениях и примыканиях производится организованный и дозированный впуск автомобилей с примыкающих дорог.
Контрольные вопросы
- В чем состоят методы организации движения?
- В чем состоят автоматизированные методы управления движением на дорогах, каковы их основные элементы и технические средства?
- В чем заключаются основные положения стратегии автоматизированного управления движением?
224
Глава 19.
Дата добавления: 2020-08-31; просмотров: 1427;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- Money Management - основы управления капиталом
- Автоматизация процессов управления перевозками
- АВТОМАТИЗАЦИЯ СТРАТЕГИЧЕСКИХ ЗАДАЧ УПРАВЛЕНИЯ
- Автоматизация управления процессами производства синтетического каучука
- Автоматизированная Система Оперативного Управления Перевозками (АСОУП)
- Автоматизированная система управления запасами агрегатов и комплектующих изделий (АС “СКЛАД”).
- Автоматизированные аналитико-статистические информационные системы, системы учета и управления

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
