На автомобильных дорогах
Системы управления и их основные элементы. Техническое совершенствование и повышение уровня содержания дорог значительно сокращают колебания их транспортно-эксплуатационных качеств во времени под действием движущихся транспортных средств и погодно-климатических факторов, но не могут исключить полностью.
209
Эти колебания вместе с изменениями интенсивности движения и метеорологических (погодных) условий приводят к изменению режимов движения, образованию заторов и повышению аварийности в отдельные периоды года и суток.
Следовательно, для обеспечения удобного и безопасного движения необходимо иметь гибкую систему управления движением, прогнозировать его возможные режимы и задавать оптимальные.
Конечная цель управления дорожным движением - повышение экономической эффективности перевозок, безопасности, скорости и пропускной способности.
Процесс управления дорожным движением с позиций кибернетики состоит из четырех основных этапов:
• оценки системы, т.е. получения исходной информации о параметрах комплекса водитель - автомобиль - дорога - среда (ВАДС);
• анализа информации и выработки управляющих мероприятий, решений и указаний;
• реализации принятых решений;
• контроля за состоянием системы (выходными параметрами) для определения дальнейших действий.
На уровне оперативного (текущего) управления осуществляют:
• постоянный контроль за состоянием дорог, метеорологических условий, параметрами транспортного потока и обстановкой на дороге как в целом, так и на ее отдельных участках;
• информирование водителей об этих режимах через управляемые знаки, светофоры, табло, радио и контроль за выполнением выдаваемых команд;
• выявление и обнаружение мест ДТП, заторов, повреждений дорог и искусственных сооружений, обеспечение нормальных условий движения на этих участках, а также ликвидация последствий ДТП и других опасных ситуаций с использованием всех ресурсов дорожной службы.
На этом уровне заняты наибольшее число людей и ресурсов, используется много технических средств, поэтому здесь наиболее целесообразно внедрять современные методы автоматизации процессов управления движением.
Организация и управление движением - составная часть функционирования дороги (рис 18.6) - возможны только на основе глубокого знания состояния дороги и искусственных сооружений, особенностей ее работы в различные периоды года и в сложных погодных условиях, ресурсов и возможностей дорожной службы.
Различный технический уровень автомобильных дорог, уровни их загрузки, климатические особенности района расположения и другие факторы обуславливают необходимость разработки и применения различных систем управления движением.
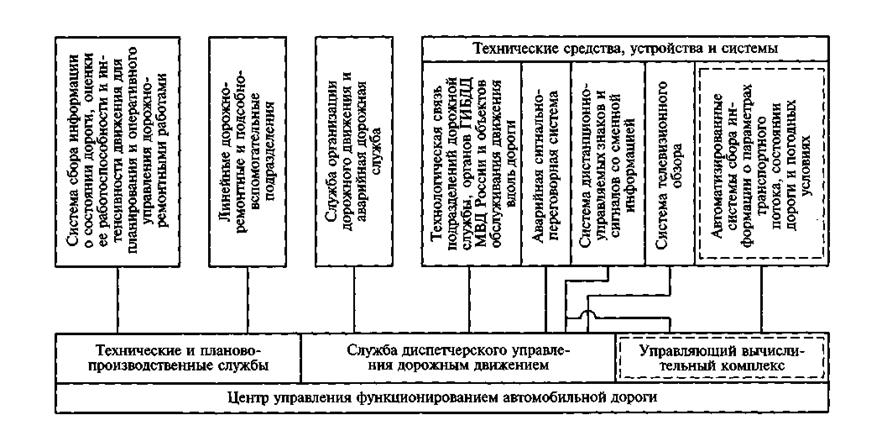
Рис. 18.6. Структурная схема системы управления функционированием автомобильной дороги
(пунктиром выделены блоки, необходимые при автоматизированном управлении).
По сложности, решаемым задачам и применяемым техническим средствам системы управления могут быть классифицированы следующим образом:
• простые системы, обеспечивающие управление движением на отдельных участках с применением дорожных знаков и указателей с постоянной и сменной информацией, а также световых табло с местным управлением. Применяют эти системы на дорогах I-III категорий при интенсивности движения до 700 авт. /сутки;
• сложные линейные системы диспетчерского управления движением, которые также управляют дорожной аварийной службой и службой зимнего содержания. В состав данных систем входят дорожные знаки и светофоры с дистанционным управлением, средства телевизионного обзора опасных участков, средства телефонной и радиосвязи, линия энергоснабжения. Применяют такие системы на дорогах I и II категорий с интенсивностью движения более 7 000 авт. /сутки;
• сложные сетевые системы, координирующие управление движением на сети дорог крупного транспортного узла, оперативно управляющие дорожной аварийной службой и службой зимнего содержания дорог. В состав технических средств входят управляемые дорожные знаки, сигналы и светофоры на основных узлах с местным или дистанционным управлением, несколько управляющих пунктов, оборудованных средствами связи для обмена информацией.
• локальные системы автоматизированного управления движением на отдельных участках, в тоннелях, на крупных мостах, на реверсивной полосе, въездах, съездах и т.д. В состав технических средств входят система дистанционного управления знаками и светофорами, системы вентиляции и освещения, система видеонаблюдения, пульт управления, линии связи.
• системы автоматизированного регулирования и управления на автомобильных магистралях (системы типа АРДАМ), позволяющие обеспечивать оптимальный режим движения по автомобильной магистрали, координированное управление на въездах и съездах, реверсивное движение, оперативное управление дорожной аварийной службой и службой текущего и зимнего содержания. Такие системы применяют на автомобильных дорогах I категории с интенсивностью движения 20 000 авт./сутки.
• автоматизированные системы управления движением на сети дорог (АСУО СД) крупного транспортного узла или области. Имеют в своем составе те же средства, что и система АРДАМ. Однако управление движением в этом случае осуществляется, исходя из стратегии, обеспечивающей наиболее эффективное функционирование (загрузку) сети дорог в целом, либо выбора рекомендуемого маршрута.
212
Создание системы управления движением может идти поэтапно, путем разработки и внедрения отдельных подсистем и элементов, при разработке и внедрении которых необходимо выполнить два основных требования: каждая подсистема должна решать самостоятельную задачу в общей задаче управления движением и функционированием дороги; подсистемы должны разрабатываться с учетом возможности их включения с наименьшими переделками в полную систему, которую можно получить внедрением ее подсистем в следующей очередности:
•создание службы организации движения, аварийной дорожной и службы оперативного управления текущим и зимним содержанием;
• проведение технологической линии связи и внедрение системы автоматизированного учета движения;
• устройство системы сигнально-переговорной связи для вызова медицинской и технической помощи, центрального диспетчерского пункта;
• оборудование дороги автономными автомобильными и дистанционно-управляемыми знаками и сигналами;
• создание центра управления;
• установление на сложных участках телевизионных установок и оснащение центра управления установками приема изображения;
• создание единой системы автоматизированного управления движением с установкой в координационно-вычислительном центре управляющей ЭВМ, мнемосхемы дороги и всего остального оборудования.
В реальных условиях могут быть другие пути внедрения современных технических средств и систем управления.
Технические средства управления. Системы автоматизированного управления движением различного уровня находят все более широкое применение на автомобильных магистралях США, ФРГ, Японии, Франции и других стран мира. Первая в России система автоматизированного регулирования движения на автомобильной магистрали (система АРДАМ) разработана под руководством автора в ГипродорНИИ. Комплекс технических средств для этой системы разработан бывшим СКБ «Промавтоматика» (г. Омск), институтом Мосгортранспроект и др.
Основная задача системы АРДАМ - сбор, анализ и переработка информации об условиях движения по дороге, выбор на этой основе целесообразных режимов движения и их обеспечение путем выдачи соответствующих команд на управляемые знаки и сигналы, а также указаний службам содержания и аварийной.
Объектами управления в системе (рис. 18.7) является транспортный поток на магистрали (ТПМ), транспортные потоки на въездах (ТПВ) и состояние поверхности проезжей части и обочин (АМ).
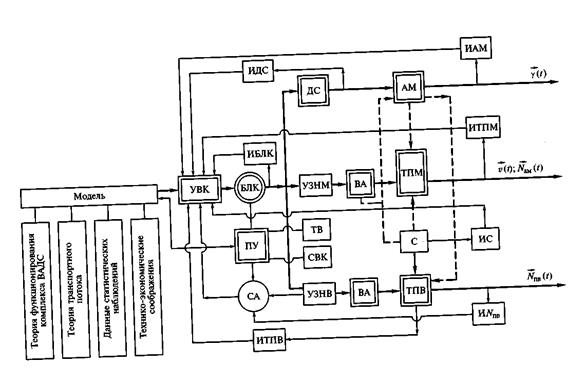
Рис. Структурная схема автоматизированной системы управления дорожным движением:
АМ – состояние автомобильной магистрали; БЛК – блок логического контроля; ВА – водитель и автомобиль; ДС – дорожная служба;
ИАМ – информация о состоянии автомобильной магистрали; ИБЛК - информация о блоке логического контроля; ИДС - информация о деятельности патрульной и аварийной дорожной службы; ИС - информация о метеорологических условиях; ИТПВ - информация о транспортных потоках на въездах;
ИТПМ - информация о транспортном потоке на автомобильной магистрали; ИNпв – интервалы на въездах; ПУ – пульт управления; С – переговорные
стойки на автомобильной магистрали; СА – счетный автомат (контроллер); СВК – сигнально-переговорные вызывные колонки; ТВ – система телевизионного обзора; ТПВ - транспортный поток на въездах; ТПМ - транспортный поток на автомобильной магистрали; УВК – управляющий вычислительный
комплекс; УЗНВ – управляемые знаки на въездах и съездах; УЗНМ – управляемые знаки на автомобильной магистрали; Nпв – интенсивность движения на въездах;  - рекомендуемые показатели плотности, скорости и интенсивности движения на автомобильной магистрали
- рекомендуемые показатели плотности, скорости и интенсивности движения на автомобильной магистрали
Средствами управления служат управляемые знаки и светофоры на основной магистрали и на въездах (УЗНМ и УЗНВ), технические средства и ресурсы аварийной дорожной службы и службы зимнего содержания (ДС).
Система АРДАМ состоит из систем сбора информации о транспортном потоке на основной магистрали (ИТПМ) и на въездах на автомобильную магистраль
(ИТПВ), о состоянии автомобильной магистрали (ИАМ), о деятельности патрульной и аварийной дорожной службы (ИДС), о метеорологических условиях (ИС), системы телевизионного обзора (ТВ) и сигнально-переговорных вызывных колонок (СВК), линий технологической связи и электроснабжения, управляющего вычислительного комплекса (УВК), включающего в себя блок логического контроля (БЛК); пульта управления (ПУ), включающего рабочие места операторов, мнемосхему и управляемые многопозиционные знаки на автомобильной магистрали (УЗНМ) и на въездах на нее (УЗНВ).
Основной узел системы АРДАМ-УВК, в который входят пульт контроля и дистанционного управления движением, вычислительный комплекс, устройство приемов и передачи сигналов. В УВК поступает вся информация от трех основных информационных систем.
Координационно-вычислительный центр в соответствии с разработанными математическими моделями управления системой дорожные условия - транспортные потоки (ДУ-ТП), алгоритмами и программами ведет переработку поступающей информации и решает главную задачу - определяет оптимальные скорости на всех полосах контролируемой автомобильной магистрали с учетом влияющих факторов в данный момент.
Помимо скорости движения центр решает вопрос об отклонении транспортных потоков на второстепенные дороги, регулирования съездов на контролируемую магистраль, запрещении обгонов и т.д.
Результаты решения формируются УВК в специальные коды и передаются в систему оповещения водителей.
Управляемые знаки и табло, а в дальнейшем радио, информируют водителей о допускаемой скорости и рядности движения, о возможности маневра обгонов, об опасных изменениях погодных условий (гололеде, тумане, боковом ветре, препятствиях и т.д.).
215
Ввиду существенного влияния погодно-климатических факторов на состояние дороги и режим движения в системе АРДАМ предусмотрено несколько передвижных дорожных лабораторий (ПДЛ), снабженных измерительной аппаратурой.
Применение передвижных лабораторий обусловлено тем, что стационарными датчиками невозможно контролировать по всей автомобильной магистрали такие параметры, как коэффициент сцепления, ровность, наличие снежных отложений и гололеда, другие метеорологические факторы (рис. 18.8).
В состав периферийных технических средств системы АРДАМ входит ряд специализированных устройств, разработанных для этой системы, и устройства из серийных средств управления дорожным движением (АСС-УД).
Из состава АСС-УД использованы дорожные контроллеры для переключения позиций управляемого указателя направлений и управляемого указателя скорости;
детекторы транспортных средств различных типов, позволяющие определять прохождение или присутствие транспортной единицы в контролируемой зоне, время прохождения участка заданной длины, состав транспортного потока; периферийное устройство обмена информацией и другие устройства.
Специально для системы АРДАМ разработаны дорожный контроллер управления въездом, выносной пульт управления, указатель скорости, управляемый указатель направлений.
Рис. 18.8. Передвижная лаборатория системы АРДАМ
216
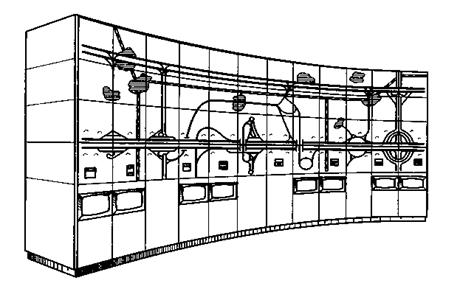
Рис. 18.9. Мнемосхема системы АРДАМ
Работу всей системы контролирует оператор с ПУ, который при необходимости может взять управление на себя и в обход УВК управлять УЗНМ, УЗНВ и ДС.
Мнемосхема (рис. 18.9) схематически изображает автомобильную магистраль с размещением на ней индикаторов; на схеме предусматривают места для размещения телевизионных экранов, куда поступает информация с элементов магистрали, включенных в систему телевизионного обзора (в первую очередь с развязок).
Информация обо всех прошедших БЛК командах и указаниях БЛК поступает в УВК для запоминания и хранения. Эта информация играет также роль обратной связи между БЛК и УВК.
Особенности организации движения с применением автоматизированных систем управления. Особенность применяемых в системах автоматизированного движения знаков состоит в том, что они имеют увеличенные размеры и значительная часть их способна изменять информацию. Размеры стороны треугольника предупреждающих знаков устанавливаемых сбоку полос движения, составляет 1,2 м, а диаметр запрещающих и предписывающих - 0,9 м.
В тоже время размеры знаков, располагаемых над полосами, могут быть меньше, чем предусмотрено ГОСТ.
Линии разметки, обозначающие край проезжей части, в 2 раза шире, чем на обычных дорогах, т.е. 0,2 м вместо 0,1 м. Размеры штрихов и разрывы между ними у линий разметки принимают максимальными.
217
На автомобильной магистрали, оборудованной системой автоматизированного управления, применяют светофоры двух типов. Для регулирования движения по полосам применяют светофор, показывающий зеленую стрелу, направленную на полосу разрешенного движения, или красный крест, означающий запрещение движения по полосе, над которой этот светофор расположен. Регулирование работы въездов осуществляют обычными трехсекционными светофорами.
В целях упорядочения движения по автомобильной магистрали транспортный поток при помощи управляемых дорожных знаков, расположенных над каждой полосой, разделяется на группы по предписываемым скоростям. Если необходимо снизить скорость при въезде на сложный участок, при возникновении затора или ДТП, система управляемых знаков указывает темп снижения скоростей автомобилей на каждой полосе.
С помощью управляемых знаков система может закрыть движение по отдельной полосе или по всему участку и направить поток на обходной маршрут (рис. 18.10). Снижение скорости должно вводиться плавно, чтобы не было двух соседних участков с разницей в разрешенной скорости более 20 км/ч.
В случае затора или ДТП может возникнуть необходимость перевести часть или все движение с участка на обходной маршрут.
При этом решают две задачи: направление потока на съезд; информирование водителей о направлении движения по обходному маршруту. Первую задачу решают путем постепенного снижения скорости по полосам и их выравнивания, а затем постепенного закрытия основных полос движения, начиная с левой полосы, вторую - установкой и включением предварительных указателей направлений движения на всех пересечениях, где обходной маршрут меняет свое направление.
Организация движения при въезде на автомобильную магистраль должна решать две задачи: выделить наиболее благоприятные условия для автомобилей, движущихся по автомобильной магистрали, и предоставить приоритет автомобилям, въезжающим с боковой дороги.
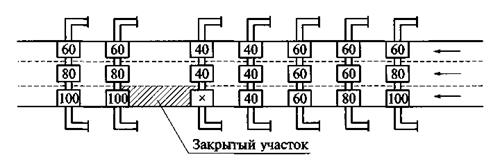
Рис. 18.10. Схема организации движения при закрытии участка полосы движения
(цифры означают скорость движения в километрах в час)
218
Первая задача является основной, когда автомобильная магистраль перегружена, вторая задача будет главной, когда автомобильная магистраль не загружена или необходимо обеспечить въезд на нее автомобилей. Обе задачи решают путем включения соответствующих сигналов светофора на въезде и указаний на знаках, расположенных над полосами движения.
Дата добавления: 2020-08-31; просмотров: 754;
Поиск по сайту
Узнать еще
- Автомобильных дорог
- Автомобильных дорог
- Автомобильных магистралей
- Виражи на автомобильных дорогах
- Воздействие автомобильных нагрузок на дорожную одежду и земляное полотно
- Вопрос 52. Рынок международных автомобильных перевозок.
- Вопрос 68. Проведение обследований маршрутов автомобильных перевозок.
- Вопрос 80. Оптимизация скорости движения на улицах и дорогах.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
