Тормозные режимы работы асинхронных электроприводов
Асинхронный электропривод может работать в тех же тормозных режимах, что и электропривод постоянного тока, а именно: в режиме рекуперативного торможения, противовключения и динамического торможения с тем же распределением потоков активной мощности (рис. 5.9).
Режим рекуперативного торможения (р.т.) имеет место при  >
>  и соответственно при
и соответственно при  <0, что происходит при вращении ротора активным моментом, либо, если при вращении ротора со скоростью
<0, что происходит при вращении ротора активным моментом, либо, если при вращении ротора со скоростью  уменьшить скорость идеального холостого хода
уменьшить скорость идеального холостого хода  . В последнем случае роль активного момента будет выполнять момент инерционных масс вращающегося ротора. В этом случае годографом вектора
. В последнем случае роль активного момента будет выполнять момент инерционных масс вращающегося ротора. В этом случае годографом вектора  будет верхняя полуокружность, а годографом вектора
будет верхняя полуокружность, а годографом вектора  - нижняя полуокружность (см. рис. 5.8,б). Из векторной диаграммы следует, что активные составляющие токов
- нижняя полуокружность (см. рис. 5.8,б). Из векторной диаграммы следует, что активные составляющие токов  ,
,  , представляющие собой проекции указанных векторов соответственно на векторы
, представляющие собой проекции указанных векторов соответственно на векторы  ,
,  , будут отрицательными, что соответствует рекуперации энергии в сеть, поступающей с вала двигателя, за вычетом потерь.
, будут отрицательными, что соответствует рекуперации энергии в сеть, поступающей с вала двигателя, за вычетом потерь.
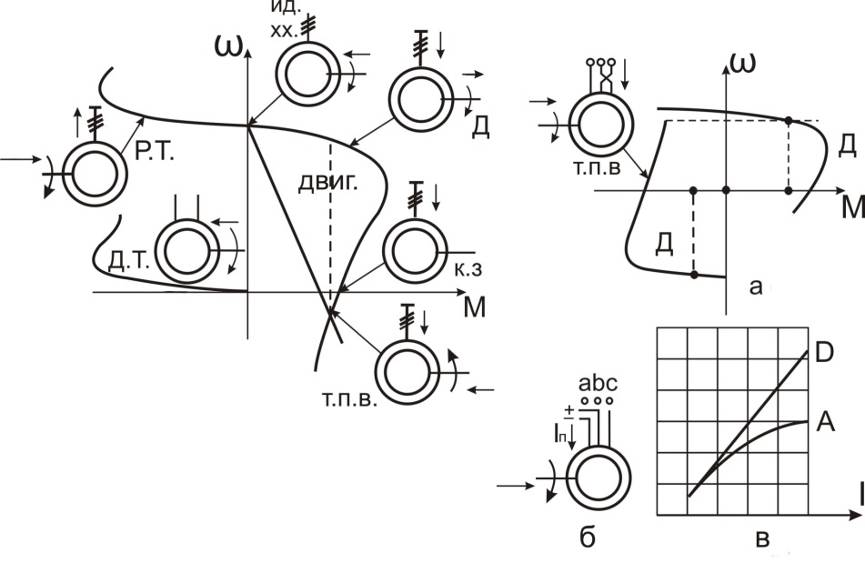
Рис. 5.9. Энергетические режимы Рис. 5.10. Реверс (а), схема
асинхронного электропривода: динамического торможе-
ид.хх – идеальный холостой ход; ния (б) и кривые для рас-
двиг. – двигательный; чёта характеристик динами-
к.з. – короткое замыкание; ческого торможения (в)
т.п.в. – торможение противовключением; асинхронного двигателя
р.т. – рекуперативное торможение;
д.т. – динамическое торможение
Однако реактивная составляющая тока  положительна, т.е. в этом случае асинхронная машина потребляет из сети реактивную мощность (энергию), необходимую для создания вращающегося магнитного поля.
положительна, т.е. в этом случае асинхронная машина потребляет из сети реактивную мощность (энергию), необходимую для создания вращающегося магнитного поля.
С ростом , а значит и с увеличением модуля  ток в цепи ротора увеличивается, при этом конец вектора стремится к точке
ток в цепи ротора увеличивается, при этом конец вектора стремится к точке  (рис. 5.8,б), а конец вектора
(рис. 5.8,б), а конец вектора  – к точке
– к точке  . Для указанных точек активные составляющие токов , равны нулю, рекуперация энергии прекращается,
. Для указанных точек активные составляющие токов , равны нулю, рекуперация энергии прекращается,  при
при  ,
,  , стремящихся к нулю.
, стремящихся к нулю.
Для машин небольшой мощности  , что позволяет осуществлять рекуперацию энергии во всех встречающихся на практике случаях. Для крупных машин, у которых
, что позволяет осуществлять рекуперацию энергии во всех встречающихся на практике случаях. Для крупных машин, у которых  >>1, указанное ограничение оказывается несущественным.
>>1, указанное ограничение оказывается несущественным.
Коэффициент полезного действия в режиме рекуперации
 ,
,
откуда видно, что при 
 .
.
При работе в режиме рекуперации двигателя с фазным ротором не следует включать дополнительные сопротивления в обмотку ротора, так как это приводит к увеличению потерь и, как следствие, к снижению КПД.
Режим рекуперативного торможения широко применяется в асинхронных электроприводах подъёмно – транспортных машин, в системах частотного управления скоростью с преобразователями частоты, в электроприводах с многоскоростными асинхронными двигателями изменением числа пар полюсов при переходе с более высокой скорости на пониженную.
В режиме противовключения обмотка статора включена на одно направление вращения, а ротор под действием активного момента или за счёт момента инерционных масс вращается в другом направлении. В обоих случаях скольжение
 >1.
>1.
В первом случае (рис. 5.9), когда  >
>  , ротор двигателя вращается в противоположную сторону вращения поля статора со скоростью (-
, ротор двигателя вращается в противоположную сторону вращения поля статора со скоростью (-  ), двигатель развивает тормозной момент, уравновешивающий активный момент. Для ограничения тока в режиме противовключения в цепь фазного ротора необходимо ввести дополнительно сопротивление
), двигатель развивает тормозной момент, уравновешивающий активный момент. Для ограничения тока в режиме противовключения в цепь фазного ротора необходимо ввести дополнительно сопротивление  (ступень противовключения).
(ступень противовключения).
Во втором случае торможение противовключением осуществляется при реверсе двигателя путём изменения порядка чередования фаз А,В,С на А,С,В (рис 5.10,а). При этом изменяется направление вращения поля статора, скольжение  >1, двигатель тормозится в режиме противовключения, а затем, если его не отключить от сети, он реверсируется. Торможение противовключением осуществляется в асинхронных электроприводах подъёмно – транспортных машин, а также в реверсивных электроприводах. Достоинство этого способа торможения – высокая эффективность, недостаток – значительные потери и расход энергии из сети, КПД равен нулю.
>1, двигатель тормозится в режиме противовключения, а затем, если его не отключить от сети, он реверсируется. Торможение противовключением осуществляется в асинхронных электроприводах подъёмно – транспортных машин, а также в реверсивных электроприводах. Достоинство этого способа торможения – высокая эффективность, недостаток – значительные потери и расход энергии из сети, КПД равен нулю.
Для осуществления динамического торможения асинхронного двигателя обмотка его статора отключается от сети переменного тока и подключается к источнику постоянного тока (рис. 5.10,б). Постоянный ток, подводимый к статору, создаёт неподвижное относительно статора магнитное поле. При вращении ротора в его обмотке наводится ЭДС, частота которой пропорциональна угловой скорости вращения ротора  . Эта ЭДС, в свою очередь, вызывает появление тока
. Эта ЭДС, в свою очередь, вызывает появление тока  в роторной обмотке. Создаваемая током ротора намагничивающая сила вращается относительно ротора в противоположном направлении со скоростью
в роторной обмотке. Создаваемая током ротора намагничивающая сила вращается относительно ротора в противоположном направлении со скоростью  , т.е. неподвижна относительно статора. Складываясь, поля статора и ротора образуют результирующее поле, в результате взаимодействия с которым тока ротора возникает тормозной момент. Энергия, поступающая с вала двигателя, рассеивается в сопротивлениях роторной цепи.
, т.е. неподвижна относительно статора. Складываясь, поля статора и ротора образуют результирующее поле, в результате взаимодействия с которым тока ротора возникает тормозной момент. Энергия, поступающая с вала двигателя, рассеивается в сопротивлениях роторной цепи.
Асинхронный двигатель в режиме динамического торможения представляет собой синхронный генератор с неявно выраженными полюсами, работающий при переменной частоте. Его нагрузкой является сопротивление роторной цепи.
В режиме динамического торможения поле статора неподвижно, при этом скольжение записывается в виде
и справедливы соотношения для механической характеристики, аналогичные (5.20-5.25)
 ; (5.50)
; (5.50)
 , (5.51)
, (5.51)
где  - критический момент и критическое скольжение двигателя в режиме динамического торможения;
- критический момент и критическое скольжение двигателя в режиме динамического торможения;
 при соединении обмоток статора в звезду;
при соединении обмоток статора в звезду;
 при соединении обмоток статора в треугольник;
при соединении обмоток статора в треугольник;
 . (5.52)
. (5.52)
Для ненасыщенной машины  >>
>>  , поэтому критическое скольжение в режиме динамического торможения
, поэтому критическое скольжение в режиме динамического торможения  существенно меньше
существенно меньше  двигательного режима. Приближённо механическую характеристику динамического торможения (рис. 5.9) можно построить по известному току холостого хода фазы
двигательного режима. Приближённо механическую характеристику динамического торможения (рис. 5.9) можно построить по известному току холостого хода фазы  и относительному эквивалентному току
и относительному эквивалентному току  , если воспользоваться кривыми рис. 5.10,в.
, если воспользоваться кривыми рис. 5.10,в.
Определив по кривым D и A, найдём с их помощью величины  и
и 
 ;
;
 .
.
Дата добавления: 2019-02-08; просмотров: 1202;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
