Колебательное движение материальной точки
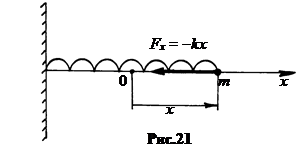
1. Незатухающие колебания. Рассмотрим движение тела, прикрепленного к свободному концу пружины (рис.21). Полагаем, что трение отсутствует. Поскольку тело может двигаться только в направлении горизонтальной прямой (например, тело скользит по натянутой струне), то в отсутствие трения сила тяжести не влияет на характер движения. Если тело сместить от положения равновесия и предоставить само себе, то в любой момент времени на него действует лишь одна сила – сила упругости, направленная к положению равновесия. В проекции на ось ОХ уравнение движения принимает вид:  , или
, или
 . (10.1)
. (10.1)
Разделим обе части уравнения на m и введём обозначение k| m = w02. Тогда получим
 . (10.2)
. (10.2)
Это дифференциальное уравнение второго порядка с постоянными коэффициентами. Чтобы найти кинематический закон движения материальной точки, надо это уравнение проинтегрировать (2-я задача динамики).
Путем подстановки различных функций можно убедиться, что решением этого уравнения является гармоническая функция x(t)= Acos(w0t+j0). (10.3)
Амплитуда А и начальная фаза j0 определяются из начальных условий при t = 0:
x(0) = x0 = Acosj0;  (0) = v0 = –Aw0sinj0. (10.4)
(0) = v0 = –Aw0sinj0. (10.4)
Отсюда амплитуда колебаний  ; начальная фаза j0= arctg
; начальная фаза j0= arctg  .
.
Итак, материальная точка, движущаяся под действием одной лишь упругой силы, испытывает гармонические колебания с постоянной амплитудой и частотой w0=  . Это незатухающие (свободные) колебания. Частота таких незатухающих колебаний w0 называется собственной частотой колебательной системы. Она определяется внутренними параметрами колебательной системы. В случае пружинного маятника – это масса груза m и жёсткость пружины k.
. Это незатухающие (свободные) колебания. Частота таких незатухающих колебаний w0 называется собственной частотой колебательной системы. Она определяется внутренними параметрами колебательной системы. В случае пружинного маятника – это масса груза m и жёсткость пружины k.
Гармонические колебания могут возникать не только под действием упругой силы, но и любой другой, пропорциональной смещению x и направленной к положению равновесия. Такие силы, определяющиеся общей формулой Fx = – kx, называются квазиупругими.
2. Энергия колебательной системы. Совокупность элементов, обеспечивающих колебательное движение тела, называют колебательной системой. Колебательную систему, в которой материальная точка совершает гармонические колебания, называют гармоническим осциллятором (или классическим осциллятором). Рассмотрим изменение кинетической и потенциальной энергии гармонического осциллятора.
а. Кинетическая энергия осциллятора есть энергия движения материальной точки,
Eк=  . Так как v =
. Так как v =  = – Aw0sin(w0t + j0), то Eк=
= – Aw0sin(w0t + j0), то Eк=  sin2(w0t + j0), или
sin2(w0t + j0), или
Eк =  . (10.6)
. (10.6)
(Из формул тригонометрии: cos2a =  (1 + cos2a), sin2a = (1 – cos2a) )
(1 + cos2a), sin2a = (1 – cos2a) )
Кинетическая энергия гармонически колеблющегося тела изменяется с удвоенной частотой 2w0.
б. Потенциальная энергия осциллятора есть энергия упругой деформации пружины. Eп=  . Так как x = Acos(w 0t + j0), то Eп=
. Так как x = Acos(w 0t + j0), то Eп=  cos2(w0t + j0). Но k = mw02. Отсюда
cos2(w0t + j0). Но k = mw02. Отсюда
 Eп= cos2(w0t+j0) =
Eп= cos2(w0t+j0) =  . (10.7)
. (10.7)
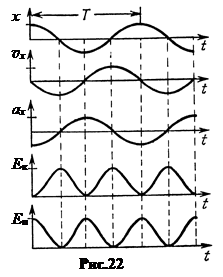
Потенциальная энергия гармонического осциллятора также изменяется по гармоническому закону с удвоенной частотой в противофазе по отношению к кинетической энергии (рис.22). Полная механическая энергия гармонического осциллятора E = Eк+ Eп = const или:
E = sin2(w0t+j0)+ cos2(w0t+j0) = . (10.8)
Когда колебания совершаются только под действием квазиупругих сил, полная механическая энергия осциллятора остаётся постоянной.
3. Математический маятник. Это идеализированная колебательная система, состоящая из точечной массы m, подвешенной в однородном гравитационном поле на невесомой и нерастяжимой нити длиной l (рис23).. Найдём кинематический закон движения математического маятника.
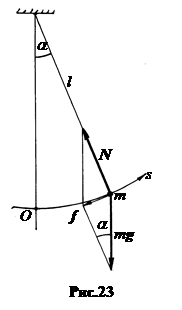 На массу m действуют две силы – сила тяжести m
На массу m действуют две силы – сила тяжести m  и сила натяжения нити
и сила натяжения нити  . Сумма этих сил
. Сумма этих сил  направлена по касательной к дуге окружности, по которой может двигаться масса m. Запишем уравнение движения при его естественном задании: m
направлена по касательной к дуге окружности, по которой может двигаться масса m. Запишем уравнение движения при его естественном задании: m  = – f.
= – f.
Но f = mg sina. Отсюда m = – mg sina. Смещение по дуге можно представить через угол a. Так как s = la , то при l =const (нить нерастяжимая) = l  , и уравнение движения в переменных a и t принимает вид:
, и уравнение движения в переменных a и t принимает вид:  sina = 0. (10.9)
sina = 0. (10.9)
Если ограничиться малыми углами, то при a < 4° sina @ a cточностью до трёх знаков. В этом случае уравнение движения упрощается: a = 0. (10.10)
Но это – уравнение незатухающих гapмонических колебаний. Кинематический закон колебаний, выраженный через угловое смещение, имеет такой же вид, как и закон колебаний груза на пружине. a = Аcos(w0t+j0). (10.11)
Здесь А – амплитудный угол отклонения нити, j0 – начальная фаза колебаний.
Циклическая частота колебаний математического маятника аналогично пружинному  . Период колебаний T0=
. Период колебаний T0=  . (Формула Гюйгенса, I673). (10.12)
. (Формула Гюйгенса, I673). (10.12)
Период колебаний не зависит от амплитуды (изохронность колебаний). Колебания изохронны лишь при малых углах отклонения маятника от положения равновесия a < 4°.
Дата добавления: 2020-05-20; просмотров: 883;
Поиск по сайту
Узнать еще
- II. Движение поездов на однопутных перегонах
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- VI. ДВИЖЕНИЕ В ЦЕНТРАЛЬНОМ ПОЛЕ
- А. Уравнения движения точки в декартовых координатах
- А.5 Неравномерное движение.
- А2 - фронтальная проекция точки А.
- Абсолютно твердое тело. Движение твердого тела
- Адрес точки доступа сетевого сервиса NSAP

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
