Аксиома V. Равновесие нетвердого (деформируемого) тела не нарушится от затвердевания данного тела.
Эта аксиома известна в механике как принцип отвердевания.
Представим себе два тела А и В, которые имеют одинаковую форму, размеры и загружены одинаковыми системами сил  ,
,  , ,…,
, ,…,  . Положим, что одно из тел, например тело А нетвердое, а второе тело В является твердым. Смысл аксиомы V состоит в том, что если нетвердое тело А под действием системы сил находится в равновесии, то и твердое тело В под действием той же системы сил будет находиться в равновесии.
. Положим, что одно из тел, например тело А нетвердое, а второе тело В является твердым. Смысл аксиомы V состоит в том, что если нетвердое тело А под действием системы сил находится в равновесии, то и твердое тело В под действием той же системы сил будет находиться в равновесии.
Эта аксиома широко используется в сопротивлении материалов. Она позволяет деформируемые или изменяемые тела, например, трос, гибкую балку, нить, цепь и т.п. рассматривать как твердые при определении влияния на них других тел или отдельных элементов друг на друга с использованием условий равновесия статики.
Связи, их кинематические и статические
Характеристики.
Устройства, которые ограничивают свободу перемещения рассматриваемого тела в пространстве или на плоскости называются связями.
Связи могут быть удерживающими и неудерживающими, а также односторонними и двухсторонними. Для установления характера связи необходимо сместить тело в разных направлениях. Если при таком смещении связь не покидает тело, то она является удерживающей. Если же тело при его смещении отделяется от связи, то она является неудерживающей. Примером удерживающей связи может служить проволока с натянутым на неё кольцом, а примером неудерживающей связи - опорная плоскость.
Каждая связь препятствует свободному смещению тела в одном или в нескольких направлениях на плоскости или в пространстве, т.е. уменьшает число степеней свободы данного тела. Под числом степеней свободы в механике следует понимать число независимых параметров, которые определяют положение тала на плоскости или в пространстве. Абсолютно твердое тело на плоскости имеет три, а в пространстве шесть степеней свободы. Материальная точка обладает двумя степенями свободы на плоскости и тремя в пространстве.
Связи, наложенные на тело, могут быть простыми и составными. Простая связь препятствует смещению тела только в одном направлении, т.е. отбирает у него одну степень свободы. Составная связь препятствует свободному перемещению тела в двух или трех направлениях, а также свободному повороту вокруг одной или нескольких координатных осей. Составную связь всегда можно представить в виде системы определенного числа простых связей.
Загруженное тело действует на связи с определенными силами, которые называют активными. Одновременно с этим связи действуют на рассматриваемое тело с силами, направленными противоположно активным и равным им по модулю. Такие силы называются реактивными, или реакциями связей. Реакция является статической характеристикой связи. Она действует в том направлении, в котором связь препятствует перемещению тела. Таким образом, существует прямая зависимость между статическими и кинематическими характеристиками связей. Реакции связей возникают только при действии на тело заданных активных сил. При разгрузке тела реакции связей исчезают.
В технической механике существует большой класс задач, требующих определения величин и направлений реактивных сил, которые возникают в связях загруженных тел. Что касается точек приложения реакций к телу, то они являются известными. Это точки закрепления тела, или точки контакта тела со связями. Неизвестными параметрами реакций связей, как правило, являются их модули и направления.
Решение таких задач осуществляется на основании принципа освобождения от связей. Его сущность состоит в том, что заданное несвободное тело мысленно освобождается от связей, а их действие компенсируется приложением неизвестных реакций. При этом линии их действия совпадают с теми направлениями, по которым связи препятствуют свободным смещениям тела. Величины и направления неизвестных реакций устанавливаются из условий равновесия системы сил. Такие условия будут установлены в последующих главах.
Рассмотрим несколько примеров простых и составных связей твердого тела и укажем их кинематические и статические характеристики.
1. Тело опирается на гладкую плоскость в точке А (рис.1.8). Рассматриваемая плоскость является простой, и к тому же односторонней, связью тела. Она препятствует свободному смещению тела вертикально вниз. Строго в этом направлении тело действует на плоскость с силой собственного веса  . Со своей стороны гладкая плоскость действует на тело с силой
. Со своей стороны гладкая плоскость действует на тело с силой  , которая является её реакцией.
, которая является её реакцией.
Реакция , приложена в точке касания тела с плоскостью и направлена вдоль внешней нормали, проведенной к плоскости из точки касания.
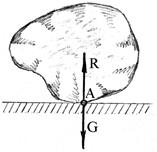
Рис.1.8
Если, к примеру, стержень (тело правильной геометрической формы) опирается на
две гладкие плоскости в точках А и В (рис.1.9), то реакции  и
и  направлены перпендикулярно опорным плоскостям и приложены к стержню в опорных точках А и В соответственно.
направлены перпендикулярно опорным плоскостям и приложены к стержню в опорных точках А и В соответственно.
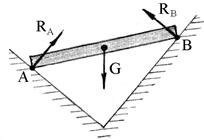
Рис.1.9
2. Простая опора. Если стержень опирается на неподвижную линию, например, на ребро А двугранного угла (рис.1.10), то такая опора стержня называется простой. Она препятствует смещению стержня в направлении, перпендикулярном к его поверхности.
Поэтому реакция такой опоры приложена в средней точке участка опирания и всегда направлена перпендикулярно к поверхности стержня (тела) в единственно возможном направлении - от опоры к стержню. В противном случае стержень покинет опору.
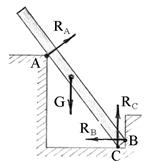
Рис.1.10
3. Связью тела является гибкая нить или шарнирно закрепленный стержень(рис.1.11,а и 1.11,б).

Рис.1.11
Под действием веса , рассматриваемого тела в гибкой нити, или опорном стержне возникает реакция, которая направлена вдоль геометрической оси нити (стержня), так как только в этом направлении указанные связи препятствуют свободному перемещению тела.
4. Связью тела является цилиндрический шарнир. Конструктивно такая связь образуется из втулки и валика (рис.1.12). Втулка жестко соединяется с рассматриваемым телом, а валик соединяется с другими телами, неподвижными или подвижными. В первом случае шарнирную опору называют неподвижной, а во втором случае - подвижной. Предполагается, что поверхности валика и втулки абсолютно гладкие и втулка может свободно вращаться вокруг валика. В зависимости от расположения активных сил, реакция неподвижной шарнирной опоры может иметь различное направление, но линия её действия всегда проходит через центр валика. Следовательно, реакция шарнира имеет радиальное направление, т.е. нормальное к поверхности валика. Неизвестными являются численная величина реакции и угол αмежду положительными направлениями координатной оси x и искомой реакции (рис.1.12,а).
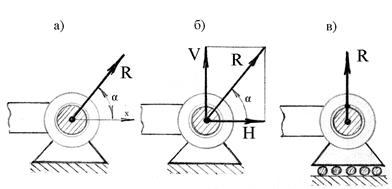
Рис.1.12
Неподвижный цилиндрический шарнир можно рассматривать как составную связь, препятствующую свободным перемещениям тела в двух взаимно перпендикулярным направлениям, совпадающих с направлениями координатных осей.
Тогда реакция . неподвижной шарнирной опоры будет определяться двумя составляющими: горизонтальной  и вертикальной
и вертикальной  , модули которых неизвестны и подлежат определению (рис.1.12,б).
, модули которых неизвестны и подлежат определению (рис.1.12,б).
Подвижный цилиндрический шарнир препятствует смещению тела лишь в одном направлении, перпендикулярном к направлению подвижности опоры. В сторону внешней нормали к поверхности скольжения опоры направлена реакция подвижного шарнира (рис.1.12,в).
Более полный анализ составных связей и их реакций будет рассмотрен в главе V при изучении равновесия стержня и стержневых систем.
Вопросы для самоконтроля полученных знаний.
1) Что такое векторная и что такое скалярная величины?
2) Что такое сила в механике, и какими элементами она определяется?
3) Что принимается за единицу измерения силы в системе единиц СИ и в технической системе МКГСС?
4) Что представляет собой система сил, действующих на тело?
5) В каком случае две системы сил являются статически эквивалентными?
6) Что такое внешние силы, действующие на тело? Какие виды внешних сил могут быть приложены к телу?
7) Сформулируйте основные аксиомы статики.
8) Как определяется равнодействующая двух сил, приложенных в одной точке тела?
9) Что такое «действие» и «противодействие» двух тел?
10) Что такое свободное и несвободное тело?
11) Как называют устройства, ограничивающие свободу перемещения тел?
12) Какие виды этих устройств встречаются?
13) Что называют реакциями связей тела?
14) Как устанавливаются направления и линии действия реакций опорных связей тела?
15) Как направлены реакции гибкой нерастяжимой нити и жесткого стержня?
16) Как направлена реакция плоскости, если тело опирается на неё в одной точке?
17) Как направлена реакция связи в виде двухгранного угла, если на неё опирается плоское тело?
18) Что такое неподвижная цилиндрическая опора и как действует её реакция?
19) На какие составляющие может быть разложена реакция неподвижной цилиндрической опоры?
20) Что такое подвижная цилиндрическая опора и как действует её реакция?
ГЛАВА II
ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ.
Дата добавления: 2018-11-26; просмотров: 1782;
Поиск по сайту
Узнать еще
- IV. Структурно-иерархическая модель личности Реймонда Кеттела
- А.3 Равновесие при адсорбции
- Абсолютно твердое тело. Движение твердого тела
- Адсорбционное равновесие
- Аксиома вторая. Вопрос о производственных отношениях вторичен по отношению к вопросу о типе жизнедеятельности.
- Аксиома о потенциальной опасности деятельности
- Аксиоматика информатики

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
