Кривошипный механизм
Кривошип (рис.84) — звено кривошипного механизма, которое может совершать полный оборот вокруг неподвижной оси. Кривошип (I) имеет цилиндрический выступ — шип 1 , ось которого смещена относительно оси вращения кривошипа на расстояние r, которое может быть постоянным или регулируемым. Более сложным вращающимся звеном кривошипного механизма является коленчатый вал. Эксцентрик (III) — диск, насаженный на вал с эксцентриситетом, то есть со смещением оси диска относительно оси вала. Эксцентрик можно рассматривать как конструктивную разновидность кривошипа с малым радиусом.
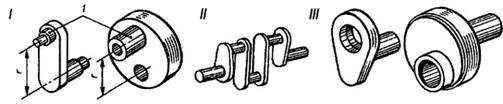 рис.84
рис.84
|
Кривошипный механизм — механизм, преобразующий один вид движения в другой. Например, равномерно вращательное — в поступательное, качательное, неравномерное вращательное и т. д. Вращающееся звено кривошипного механизма, выполненное в виде кривошипа или коленчатого вала, связано со стойкой и другим звеном вращательными кинематическими парами (шарнирами). Принято различать подобные механизмы на кривошипно-шатунные, кривошипно-коромысловые, кривошипно- кулисные и др. в зависимости от характера движения и наименования того звена, в паре с которым работает кривошип.
Используются кривошипные механизмы в поршневых двигателях, насосах, компрессорах, прессах, в приводе движения металлорежущих станках и других машинах.
Кривошипно-шатунный механизм — один из самых распространенных механизмов преобразования движения. Его применяют как для преобразования вращательного движения в возвратно-поступательное (например, поршневые насосы), так и для преобразования возвратно-поступательного во вращательное (например, двигатели внутреннего сгорания).
Шатун — деталь кривошипно-шатунного (ползунного) механизма, передающая движение поршня или ползуна на кривошип коленчатого вала. Часть шатуна, служащая для присоединения к коленчатому валу, называется кривошипной головкой, а противоположная часть — поршневой (или ползунной)головкой.
Механизм состоит из стойки 1 (рис. 85), кривошипа 2, шатуна 3 и ползуна 4. Кривошип совершает непрерывное вращение, ползун — возвратно-поступательное движение, а шатун — сложное, плоско-параллельное движение. , Полный ход ползуна получается равным удвоенной длине кривошипа. Рассматривая перемещения ползуна из одного положения в другое, нетрудно увидеть, что при повороте кривошипа на равные углы ползун проходит разное расстояние: при движении от крайнего положения к среднему участки пути ползуна увеличиваются, а при движении от среднего положения к крайнему — уменьшаются. Это свидетельствует о том, что при равномерном движении кривошипа ползун движется неравномерно. Так скорость движения ползуна меняется от нуля в начале его движения и достигает наибольшей величины, когда кривошип и шатун образуют между собой прямой угол, затем снова уменьшается до нуля при другом крайнем положении.
|
рис.85
Неравномерность хода ползуна вызывает появление сил инерции, оказывающих отрицательное влияние на весь механизм. В этом главный недостаток кривошипно-ползунного механизма.
В некоторых кривошипно-шатунных механизмах возникает необходимость в обеспечении прямолинейности движения поршневого штока 4 (рис.86). Для этого между кривошипом 1, шатуном 2 и ползуном 5 используют так называемый крейцкопф 3, воспринимающий на себя качательные движения шатуна (4 — шток промежуточный).
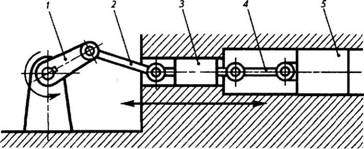 рис.86
рис.86
|
Кулисный механизм
Кулиса 1 — звено (деталь) кулисного механизма, снабженное прямолинейной или дугообразной прорезью, в которой перемещается небольшой ползун — кулисный камень 2 (рис.87). Кулисный механизм — рычажный механизм, преобразующий вращательное или качательное движения в возвратно-поступательное и наоборот. По виду движения различают кулисы: вращающиеся, качающиеся и прямолинейно движущиеся (3 — отверстие, через которое вставляется и удаляется кулисный камень).
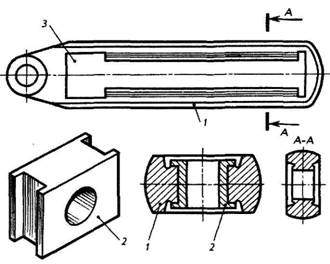 Рис. 87
Рис. 87
|
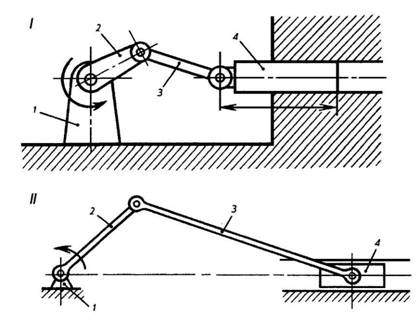
Кривошипно-кулисный механизм. На рис. 88 показаны наиболее распространенные конструктивные разновидности таких механизмов.
На рис. 88. I показано, что вокруг неподвижной оси вращается кривошип 3, шарнирно соединенный одним концом с ползуном (кулисным камнем) 2. При этом ползун начинает скользить (перемещаться) в продольном прямолинейном пазу, прорезанном в рычаге (кулисе) 1, и поворачивать его вокруг неподвижной оси. Длина кривошипа позволяет придать кулисе вращательное движение. Подобные механизмы служат для преобразования равномерного вращательного движения кривошипа в неравномерное вращательное движение кулисы, но если при этом длина кривошипа равна расстоянию между осями опор кривошипа и кулисы, то получается кривошипно-шатунный механизм с равномерно вращающейся кулисой.
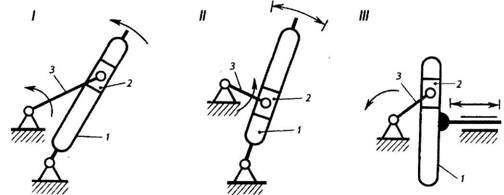 Рис. 88
Рис. 88
|
Кривошипно-кулисный механизм с качающейся кулисой(рис.88, II) служит для преобразования вращательного движения кривошипа 3 в качательное движение кулисы 1 и при этом происходит быстрый ход при движении ползуна в одну сторону и медленный — в другую. Механизм широко применяется в металлорежущих станках, например: в поперечно-строгальных, зубодолбежных и др.
Кривошипно-кулисный механизм с поступательно движущейся кулисой (рис.88. III) служит для преобразования вращательного движения кривошипа 3 в прямолинейно-поступательное движение кулисы 1. В механизме кулиса может быть расположена вертикально или наклонно. Применяется такой механизм для малых длин хода и находит широкое применение в счетных машинах (синусный механизм).
Кулачковый механизм
Кулачок — деталь кулачкового механизма с профилированной поверхностью скольжения, чтобы при своем вращательном движении передавать сопряженной детали (толкателю или штанге) движение с заданным законом изменения скорости. Геометрическая форма кулачков может быть различной: плоской, цилиндрической, конической, сферической и более сложной.
Кулачковые механизмы — преобразующие механизмы, изменяющие характер движения. В машиностроении широко распространены кулачковые механизмы, преобразующие вращательное движение в возвратно-поступательное и возвратно - качательное. Кулачковые механизмы (рис. 89 и 90), как и другие виды механизмов, подразделяют на плоские и пространственные.
Кулачковые механизмы применяют в тех случаях, когда перемещение, скорость и ускорение ведомого звена должны изменяться по заранее заданному закону, в частности, когда ведомое звено должно периодически останавливаться при непрерывном движении ведущего звена.
| Чаще всего кулачковый механизм состоит из трех звеньев (рис. 89а): кулачка 1, толкателя 2 и стойки 3. На рис. 89б представлен четырехзвенный кулачковый механизм (четвертое звено — ролик 4). Кулачковые механизмы подразделяются на плоские и пространственные. Плоскими называют такие кулачковые механизмы, у которых кулачок и толкатель перемещаются в одной или параллельных плоскостях; пространственными — такие, у которых кулачок и толкатель перемещаются в непараллельных плоскостях. | 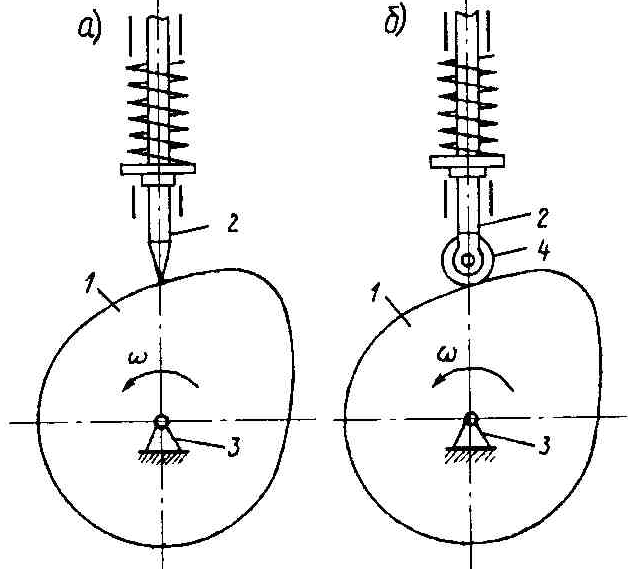 рис.89
рис.89
|
Для увеличения стойкости кулачки изготавливают из высококачественной стали с рабочей поверхностью высокой твердости. С целью уменьшения трения и износа на толкателе устанавливают ролик, который вращается на оси и катится без скольжения по рабочей поверхности кулачка (рис. 89б).
Кроме износа звеньев недостатком кулачковых механизмов является необходимость обеспечивать постоянное соприкосновение (замыкание) между звеньями. В процессе работы кулачкового механизма могут возникать большие силы, главным образом инерционные, направленные на отрыв рабочей поверхности толкателя от кулачка.
Для восприятия этих сил применяются либо геометрическое (кинематическое), либо силовое замыкание кинематической цепи.
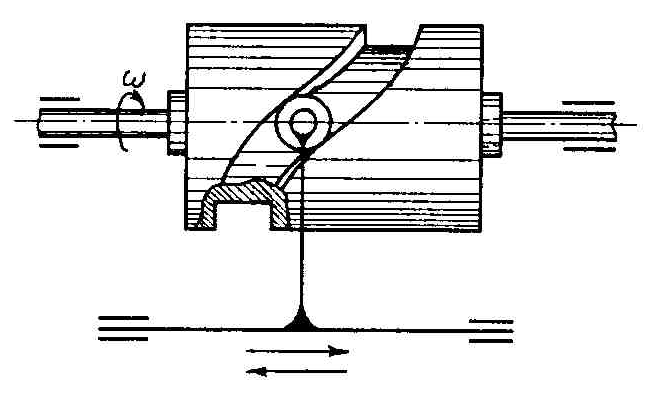 рис.90
рис.90
| 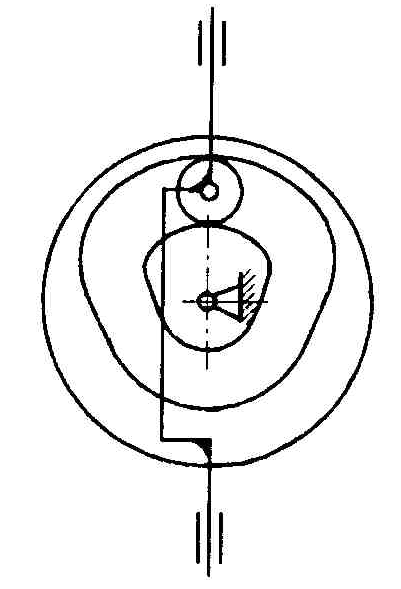 рис.91
рис.91
|
На рис. 90 представлена схема пространственного цилиндрического кулачкового механизма с профильным пазом на боковой поверхности.
Геометрическое (кинематическое) замыкание применено в представленном на рис. 90 и 91 механизме с пазовым кулачком. Толкатель движется поступательно. При вращении кулачка ролик толкателя соприкасается с боковыми сторонами паза, прорезанного на кулачке. Паз создает два рабочих профиля кулачка которые перемещают ролик толкателя в обоих направлениях.
При силовом замыкании толкатель во всех положениях прижат к кулачку с силой, которая больше силы, стремящейся оторвать толкатель от кулачка. Замыкающая сила в подавляющем большинстве случаев создается пружиной (рис. 89).
К числу недостатков кулачковых механизмов следует отнести сложность изготовления профиля кулачка, от которого требуется большая точность.
В тех случаях, когда толкатель должен перемещаться с периодическими остановками, участки профиля кулачка, соответствующие этим периодам, должны быть очерчены дугами окружности, проведенными из центра вращения кулачка.
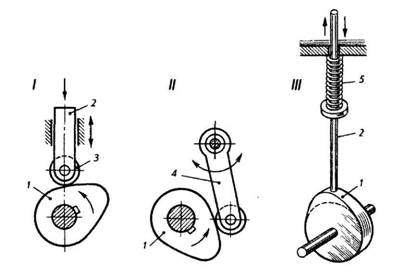 Рис. 92
Рис. 92
| 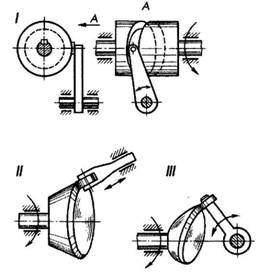 Рис. 93
Рис. 93
|
Кулачковые механизмы применяют для выполнения различных операций в системах управления рабочим циклом технологических машин, станков, двигателей и т. д. Основным элементом системы газораспределения двигателя внутреннего сгорания является простейший кулачковый механизм, изображенный на рис. 92, I. Механизм состоит из кулачка 1, штанги 2, связанной с рабочим органом, и стойки, поддерживающей в пространстве звенья механизма и обеспечивающей каждому звену соответствующие степени свободы. Ролик 3, устанавливаемый в некоторых случаях на конце штанги, не влияет на закон движения звеньев механизма. Штанга, совершающая поступательное движение, называется толкателем 2, а вращательное — коромыслом 4 (рис. 92, II). При непрерывном движении кулачка толкатель совершает прерывное поступательное, а коромысло — прерывное вращательное движения.
Обязательным условием нормальной работы кулачкового механизма является постоянное касание штанги и кулачка (замыкание механизма). Замыкание механизма может быть силовым и геометрическим. В первом случае замыкание обычно обеспечивается пружиной 5 (рис. 92, III), прижимающей штангу к кулачку, во втором — конструктивным оформлением толкателя, особенно, его рабочей поверхности. К примеру, толкатель с плоской поверхностью (рис. 93, III) касается кулачка разными точками, потому его применяют только в случае передачи малых усилий.
В машинах легкой промышленности для обеспечения весьма сложного взаимосвязанного движения деталей, наряду с простейшими плоскими, применяют пространственные кулачковые механизмы. В пространственном кулачковом механизме можно увидеть типичный пример геометрического замыкания — цилиндрический кулачок с профилем в виде паза, в который входит ролик толкателя (рис.93,I).
При выборе типа кулачкового механизма стараются остановиться на применении плоских механизмов, имеющих значительно меньшую стоимость по сравнению с пространственными, и во всех случаях, когда это возможно, используют штангу качающейся конструкции, так как штангу (коромысло) удобно устанавливать на опоре с применением подшипников качения. Кроме того, в этом случае габаритные размеры кулачка и всего механизма в целом могут быть меньше.
Изготовление кулачковых механизмов с коническими и сферическими кулачками (рис.93, II и III) является сложным техническим и технологическим процессом, а потому и дорогим. Поэтому такие кулачки применяют в сложных и точных приборах.
Храповые механизмы
Прерывистое движение в одну сторону чаще всего осуществляется при помощи храповых и мальтийских механизмов.
Храповые механизмы применяют для осуществления движений подачи инструмента и обрабатываемого материала в различных станках. Кроме того, их используют в качестве тормозных устройств, препятствующих обратному ходу. Так, храповой механизм в грузоподъемных лебедках предотвращает падение поднятого груза.
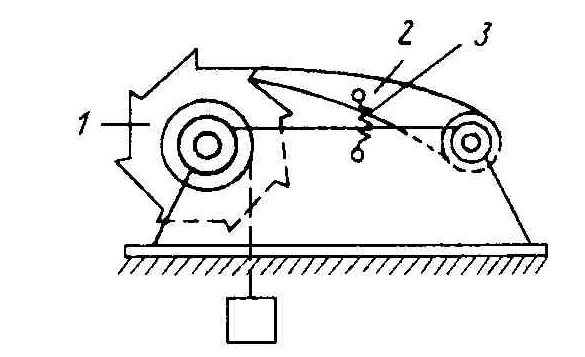 рис.94а
рис.94а
| 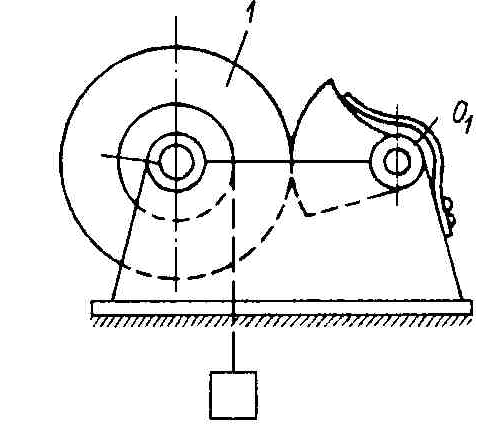 рис.94б
рис.94б
|
Основой храпового механизма служит храповая пара (рис. 94а), состоящая из звена 1, называемого храповиком, и звена 2, называемого собачкой или щеколдой. Замыкая оба звена пружиной 3, получаем храповой механизм.
Храповые механизмы делятся на два основных класса:
1. Механизмы, в которых храповик задерживается собачкой только в одном направлении, а в другом направлении может двигаться и приподнимать собачку. К этому классу относятся механизмы, имеющие храповики с острыми зубьями (рис. 94а).
2. Механизмы, в которых храповик затормаживается в двух направлениях. К этому классу относятся механизмы, имеющие храповики с симметричными зубьями. Действие такого храповика соответствует работе двух противоположно действующих храповых механизмов.
Широкое распространение получили фрикционные храповые механизмы (рис. 94б). Их можно рассматривать как зубчатые с бесконечно малым шагом. Центр вращения кулачка О1 и центр дуги, по которой он очерчен, не совпадают, поэтому торможение происходит только при вращении звена 1 в одном направлении.
Мальтийские механизмы
Мальтийские механизмы (рис. 95) применяют для преобразования непрерывного вращения ведущего звена 1 в прерывистое движение ведомого звена 3.
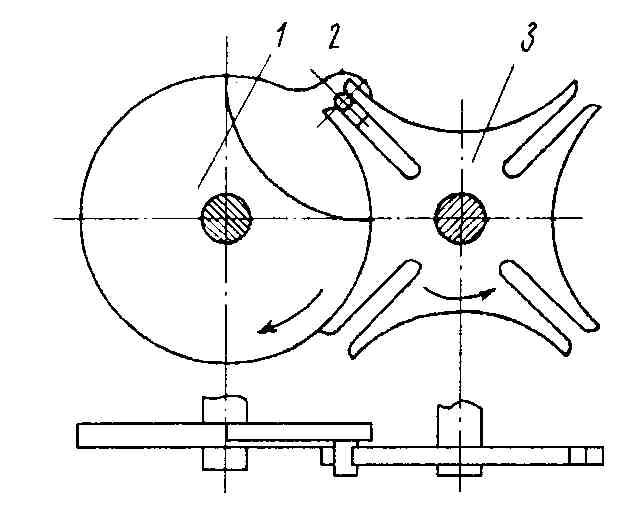
рис.95
Палец 2, закрепленный на ведущем звене 1, последовательно входит в прорези ведомого звена (креста 3). На рисунке показан момент начала движения креста 3. Палец 2 находится в начале прорези. При вращении звена 1 по часовой стрелке палец входит внутрь прорези, приближаясь к оси вращения креста, а затем начинает удаляться от оси и выходит из прорези. Пока палец перемещается по прорези, крест поворачивается, а после выхода пальца из прорези крест останавливается. Палец, продолжая вращаться, через некоторое время входит в следующую прорезь креста, и движение креста снова повторяется. Если крест имеет четыре прорези, как показано на рис.95, то при одном полном повороте пальца крест поворачивается на четверть поворота. Чтобы крест во время остановки не поворачивался самопроизвольно, поверхность между его прорезями делается вогнутой, а поверхность ведущего диска — выпуклой.
Мальтийские механизмы изготовляют с тремя, четырьмя, пятью, шестью и восемью прорезями креста, что соответствует 1/3, 1/4, 1/6 и 1/8 оборотов ведомого звена за один полный оборот ведущего звена.
Дата добавления: 2020-04-12; просмотров: 2142;
Поиск по сайту
Узнать еще
- A) четырехшарнирный механизм
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- R-плазмиды, функции, строение. Пути передачи. Механизм множественной лекарственной устойчивости.
- VI.НЕЙРОХИМИЧЕСКИЕ МЕХАНИЗМЫ ПЛАСТИЧНОСТИ И ПАМЯТИ.
- Алгоритм проектирования кулачкового механизма по допустимому углу давления
- Аллергические реакции 1 типа (реагиновые). Стадии, медиаторы аллергии 1 типа, механизмы их действия. Клинические проявления (анафилактический шок, атопические реакции).
- АНАЛИЗ МЕХАНИЗМА ЦЕНООБРАЗОВАНИЯ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
