Структура ПР (определения, классификация)
Рассмотрим структурную схему (рис. 6), поясняющую принцип формирования движения одной переносной степени подвижности ПP (например, плеча или локтя руки).
Кинематическая схема исполнительного механизма (ИМ) степени подвижности должна обеспечивать угловое или линейное перемещение ведомого звена. Связь входного звена ИМ с двигателем М может осуществляться через редуктор Ред (если необходимо снижение скорости). В ПР используются различные пневматические, гидравлические или электрические двигатели. Как правило, для приведения в движение основных степеней подвижности применяют двигатели одного вида (например, электрические).
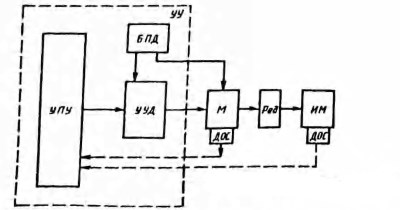
Рис. 6. Структурная схема ПР
Двигатель М снабжается устройством управления двигателем (УУД), выполняющим функции преобразования энергии управления и регулирования параметров движения. Двигатель вместе с устройством управления имеет общее название — привод. Иногда в состав привода включается также редуктор (например, ГОСТ 1659379 для электроприводов). Классификация ПР осуществляется по видам двигателей, входящих в приводы основных исполнительных механизмов; ПР с электрическими, гидравлическими или пневматическими приводами.
Устройства управления электрическими двигателями обычно комплектно поставляются промышленностью. Эти устройства при проектировании выбирают по каталогам. Гидравлические и пневматические УУД комплектуются из типовых элементов также по соответствующим каталогам.
Двигатели ПР выбирают по мощности и скоростным параметрам. Методика определения этих параметров приведена в гл. 7.
Для питания двигателя энергией силовая часть управляющего устройства (УУ) содержит блок питания двигателя (БПД). Например, в электроприводах этот блок совмещается с УУД. В гидроприводах под БПД понимают гидронасос и его оборудование.
В пневмоприводах (при питании от воздушной сети цеха) БПД может отсутствовать.
Программа работы ПР формируется в отдельном устройстве — устройстве программного управления (УПУ).
Программа состоит из кодированной последовательности команд, определяющих координаты и скорости движения ЗУ. Такая программа называется управляющей. Эта программа включает также команды, увязывающие действия ПР с работой оборудования, которое он обслуживает (например, включение-выключение станка или пресса и т.п.). Программоносителями могут быть кулачковые барабаны, штекерные наборные панели, магнитные ленты и др.
Выполнение движений по программе контролируется датчиками обратной связи (ДОС). Эти датчики выдают информацию о перемещениях и скорости, поступающую в УПУ для сравнения с управляющей программой. ДОС могут быть установлены непосредственно на двигателе или на исполнительном механизме. Связи ДОС с УПУ показаны на рис. 6 условно штриховыми линиями.
Устройство программного управления может быть размещено либо в пульте 3 устройства управления УУ (см. рис. 2), либо в отдельной стойке 4. Для удобства обслуживания, а также для “обучения" ПР новой программе УПУ имеет выносной пульт 5.
ПР классифицируются по видам программного управления.
1. ПР с позиционным управлением, при котором рабочий орган перемещается по заданным управляющей программой фиксированным точкам (точкам позиционирования). При такой системе управления траектория движения между точками позиционирования не контролируется (рис. 7, а).
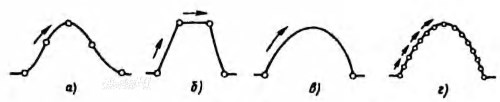
Рис. 7. Траектория движения захватного устройства ПР
Частным случаем позиционного управления является цикловое управление, при котором число программируемых точек позиционирования обычно равно 1...2 (в начале и в конце участка траектории). Задаются эти точки упорами или конечными переключателями (рис. 7, б).
Позиционные и цикловые УПУ применяются в ПР, выполняющих дискретные технологические перемещения (в основном транспортные и сборочные операции).
2. ПР с контурным (непрерывным) управлением, при котором рабочий орган перемещается по непрерывной траектории (с установленными по программе значениями скорости движения по времени) (рис. 7, в). Контурные УПУ применяют в ПР, выполняющих непрерывные технологические перемещения (например, сварку, покраску).
3. ПР с позиционно-контурным (комбинированным) управлением. Эти УПУ применяются в ПР как для транспортных, так и для технологических операций с обходом контура несложной конфигурации (рис. 7, г)
Устройства программного управления выпускаются промышленностью как самостоятельные унифицированные изделия, называемые "управляющие системы ПР” (УС). Они имеют блочно-модульное построение функциональных узлов. Современные УС являются развитыми устройствами числового программного управления (ЧПУ), созданными на базе микроЭВМ или микропроцессорных наборов.
При выборе управляющей системы для проектируемого ПР важными вопросами являются:
- выбор типа системы, согласование ее параметров с возможностями ПР и того оборудования, которое он будет обслуживать;
- определение числа управляемых координат системы, а также числа выходных технологических команд для вспомогательного оборудования. Необходимо учитывать, что одна управляющая система ПР должна обслуживать все его степени подвижности, содержащие приводы. Например, для руки (рис. 8), это могут быть три степени подвижности — плечо, локоть, кисть с исполнительными механизмами ИМ1 — ИМ3.
Каждый из этих механизмов имеет свой редуктор Ред1 — РедЗ, свой двигатель M1 — M3 и свое устройство управления двигателем УУД1 — УУД3. На рис. 8 показаны также объекты технологического оборудования (например, Т01 — Т02) и условно (штрихпунктирной линией) — каналы передачи команд, поступающих от управляющей системы к этим объектам;
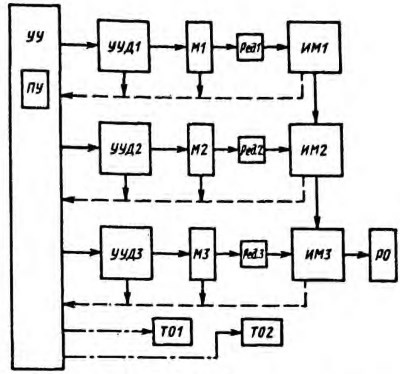
Рис. 8. Структурная схема ПР с тремя степенями подвижности
- согласование параметров управляющей системы с характеристиками электрических, гидравлических и пневматических приводов;
- подбор типа и характеристик датчиков обратной связи, работающих в цепях управляющей системы.
Все указанные вопросы являются самостоятельными проектными задачами и, как правило, выполняются совместно проектантами ПР и специалистами по управлению. Предварительно управляющую систему ПР выбирают по каталогам.
Дата добавления: 2024-10-05; просмотров: 560;
Поиск по сайту
Узнать еще
- Горизонтальная структура древостоя и лесного фитоценоза
- Каково строение мышечного волокна? Какова структура саркомера?
- Микроструктура зрелой кости в обоих поперечных сечениях
- Объемноцентрированная кубическая структура
- Организационная структура и задачи поисково-спасательной службы
- Принципы построения и структура подсистемы автоматизированного формирования облика самолета (АФОС)
- Противоэрозионная инженерно-биологическая система (ПИБС). Структура ПИБС
- Состав ПР (определения, классификация)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
