Стандартизация, унификация, агрегатно-модульное построение ПР
Стандартизация ПР существенно облегчает проектирование, устанавливает единую терминологию, обозначения, требования к ПР. В СССР разработана программа комплексной стандартизации ПР. В нее входят ГОСТы, ОСТы, методические указания и технические условия. Основополагающими являются ГОСТы на термины, классификацию, основные показатели, типоразмерные ряды. Основные положения этих ГОСТов связаны с выбором проектных параметров и изложены в настоящей книге (см. п. 2.1, а также гл. 1 и 3). Подробный перечень ГОСТов, необходимых для проектирования, приведен в справочной литературе по ПР.
Унификация ПР как метод стандартизации сокращает число объектов одинакового функционального назначения. Унификация в робототехнике развивается по линии создания отдельных компонентов ПР, а также целиком унифицированных ПР. К числу унифицированных компонентов относятся так называемые модули.
Модульный принцип основан на построении механических, приводных, программных, аппаратных частей ПР из унифицированных модулей. При проектировании возможна компоновка части ПР из некоторого набора модулей. Эта система строится таким образом, что сложные модули состоят из нескольких более простых элементов. При проектировании каждый модуль может быть выбран по соответствующим нормалям и каталогам.
Частным случаем модуля ПР является агрегат — унифицированная сборочная единица, выполняющая определенное функциональное назначение.
В настоящее время в нашей стране разработали методы агрегатно-модульного построения ПР.
К отдельным агрегатным узлам при этом предъявляются следующие основные требования: законченность и конструктивная самостоятельность механизмов; обеспечение прочности и жесткости по нормативам; обеспечение компоновки в различных сочетаниях и положениях, простота и надежность монтажа; унификация стыковочных элементов узлов одинакового назначения.
Агрегатно-модульный метод позволяет: создавать конструкции ПР на базе ограниченной группы нормализованных узлов; компоновать специализированные, упрощенные ПР; увеличить надежность ПР за счет отработанных узлов; сделать проектирование и производство более экономичным за счет снижения номенклатуры узлов и деталей.
К числу недостатков агрегатно-модульного метода проектирования относится возможность разработки конкретного ПР из узлов ограниченной номенклатуры, имеющих определенный диапазон параметров. Например, реализация заданной траектории движения рабочего органа ПР с помощью набора простейших по кинематике узлов (с одним или двумя движениями) приведет в итоге к увеличению числа сочленений. Такой агрегатно-модульный ПР будет иметь большую массу, меньшую жесткость, худшие динамические и точностные характеристики по сравнению с характеристиками ПР, созданного по индивидуальному проекту.
В связи с указанным при проектировании ПР могут быть намечены следующие два основных направления:
- ПР, которые должны выполнять сложные точные перемещения в пространстве и иметь при этом много степеней подвижности (4—6 и более), целесообразно проектировать как оригинальные универсальные конструкции. Такие ПР могут иметь широкие технологические возможности (например, выполнять сварочные и шлифовальные операции по контуру, окраску, сборку узлов в труднодоступном пространстве и т.п.);
- ПР, которые должны выполнять простые транспортные и технологические операции (например, загрузку станков, прессов и т.п.), можно проектировать на агрегатно-модульном принципе.
Пример 1. В качестве базовых в комплекте агрегатно-модульного напольного ПР (рис. 10) с пневматическими приводами (фирмы "Электролюкс”, Швеция) 3-25 разработаны следующие агрегаты и модули: 1 — выдвижения руки; 2 — основания; 3 — подъема; 4 — поворота; 5 — качания руки.
Из указанных агрегатов и модулей компонуются следующие варианты ПP: I — упрощенный настольный с выдвижением руки; II — напольный а декартовой системе координат; III - напольный в цилиндрической системе координат; IV — напольный в комбинированной системе координат. Агрегаты 1 и 3—5 имеют свои пневмодвигатели поступательного в вращательного движения и соответствующие передаточные механизмы.
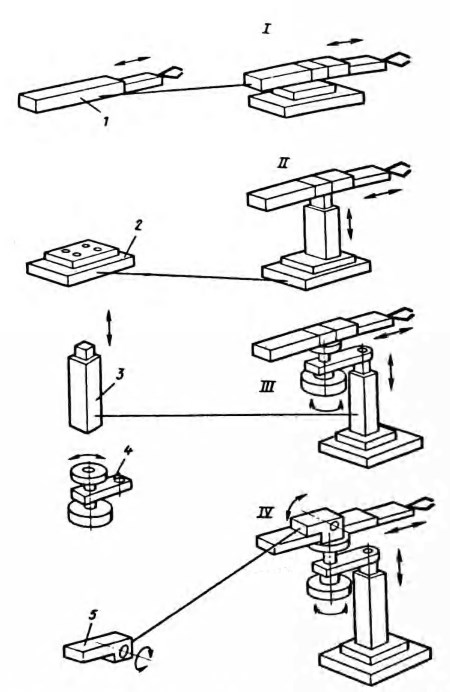
Рис. 10. Примеры компоновок агрегатно-модульного напольного ПР
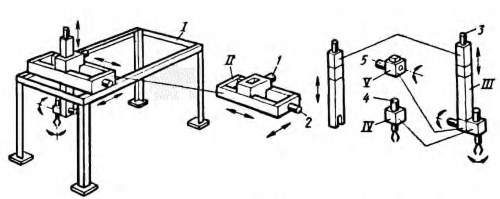
Рис. 11. Пример компоновки агрегатно-модульного мостового ПР
2. Базовые модули и агрегаты агрегатно-модульного мостового ПР (фирмы “Нико", ФРГ) с электрическими приводами (рис. 11) представляют собой: I — мост (имеющий несколько типоразмеров); II — каретку (с продольным и поперечным перемещениями); III — колонку руки; IV — агрегат поворота ЗУ; V — агрегат поворота кисти. Каждый агрегат имеет свои электродвигатели, обозначенные 1 — 5. В корпусах агрегатов II — V расположены редукторы и механизмы степеней подвижности.
Дата добавления: 2024-10-05; просмотров: 639;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
