Состав ПР (определения, классификация)
Основными составными частями ПР (как всякой автоматической машины) (ГОСТ 25686-83) являются: исполнительное устройство II, рабочий орган III и устройство управления I (рис. 2).
Исполнительное устройство II реализует двигательные функции. В него входят манипулятор 1 и устройство передвижения 2.
Манипулятор 1 обеспечивает выполнение всех движений, необходимых для перемещения объектов манипулирования (деталей, инструментов) в пространстве, например в системе координат X. Y, Z.
Рабочий орган III служит для непосредственного выполнения транспортной или технологической операции (например, захватное устройство, сварочная головка, распылитель краски, сборочный или режущий инструмент и др.).
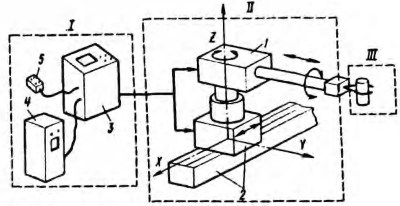
Рис. 2. Состав ПР
Устройство передвижения 2 предназначено для транспортирования всего манипулятора. Его рассматривают и проектируют как самостоятельный объект в том случае, когда манипулятор необходимо перемещать на значительные расстояния в цехе. Например, на рис. 3, а показана тележка 2 для передвижения манипулятора 1 по проходам цеха; на рис. 3, б представлен портал (или мост) 2 для передвижения манипулятора 1 над оборудованием.
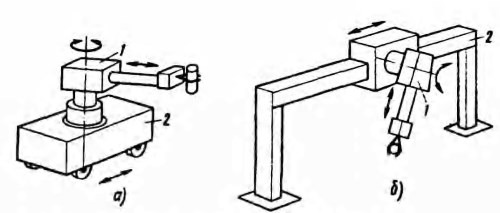
Рис. 3. Компоновки транспортных устройств ПР
В ряде случаев устройства передвижения включаются в состав самого манипулятора (например, напольные столы с направляющими на рис. 2).
Устройство управления 1 (см. рис. 2) предназначено для формирования программ и управления приводами, осуществляющими движение манипулятора.
Манипуляторы промышленного применения с устройством управления, имеющим жесткую (неизменяемую) программу, являются автооператорами. Они предназначены для выполнения простых транспортно-загрузочных операций и имеют ограниченные двигательные функции. Манипулятор промышленного применения с устройством управления, позволяющим перепрограммирование, является промышленным роботом. Под перепрограммированием понимается возможность менять программу автоматически или с помощью оператора.
Таким образом, ПР является манипулятором с развитыми двигательными функциями, аналогичными функциям руки человека, способным передвигать рабочий орган по достаточно сложной траектории.
Термин “Рука ПР" обычно используется для той основной части манипулятора ПР, которая включает его конечные элементы, несущие рабочий орган.
Пример. Различные варианты компоновки руки ПР иллюстрирует рис. 4. На рис. 4, а показан вариант компоновки при расположении руки в вертикальной плоскости YОZ, на рис. 4, б — в горизонтальной плоскости XOY. Оба варианта широко используются при проектировании ПР.
На рис. 4, а, 6 стрелками показаны поворотные (качательные) движения плеча, локтя и кисти относительно осей I — III соответственно. ЗУ 5 помимо качания может иметь еще поворот вокруг оси IV.
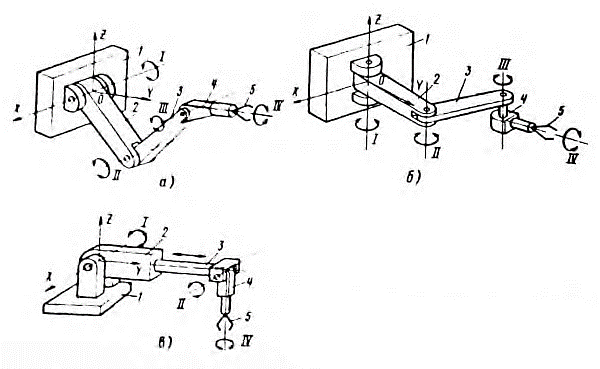
Рис. 4. Варианты компоновки руки ПР: 1 – основание руки; 2 – плечо; 3 – локоть (предплечье); 4 – кисть; 5 - ЗУ
В процессе совместного движения плеча, локтя и кисти рука ПР перемещается по сложной траектории. При этом могут быть выполнены технические операции, связанные с движением по заданному контуру и обходом различных препятствий (например, сварку, покраску, специальное шлифование, сборку в замкнутых пространствах и т.п.). Помимо указанных перемещений руки ПР, копирующих движения руки человека, в компоновках используются также другие перемещения, расширяющие двигательные возможности и упрощающие конструкцию ПP.
ПР в целом в своем составе помимо руки может иметь и другие устройства, служащие для кругового, линейного вертикального и горизонтального перемещений всей руки.
Пример. ПР на рис. 5 кроме руки 1 имеет поворотное устройство 2, подъемное устройство 3 и устройство 4 для горизонтального перемещения.
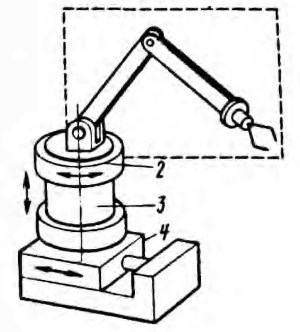
Рис. 5. Компоновка устройств дополнительного движения руки ПР
Для выполнения движений каждый элемент руки, а также поворотное, подъемное и другие устройства ПР имеют свои исполнительный механизмы и двигатели.
По терминологии, принятой при проектировании ПР, каждый такой законченный элемент или устройство, выполняющее самостоятельное движение, называется степенью подвижности. Степени подвижности делят на переносные и ориентирующие.
К числу переносных (основных) относятся те степени подвижности, движения которых (движения плеча и локтя руки, поворота, подъема и др.) необходимы для переноса ЗУ в пределах всей рабочей зоны. К числу ориентирующих (локальных) относятся степени подвижности, движения которых связаны с непосредственными функциями рабочего органа — движения кисти и рабочего органа.
Иногда учитываются еще транспортные (глобальные) степени подвижности, необходимые для переноса всего ПР (вне рабочей зоны).
ПР классифицируются по числу степеней подвижности, например, число переносных степеней подвижности может быть равно 2, 3, 4 и более; число ориентирующих степеней подвижности — 0, 1, 2, 3; число транспортных степеней подвижности — 1, 2, 3.
Все виды движений рабочего органа ПР выполняются в пространстве, которое называется рабочей зоной. Форма рабочей зоны определяется типом системы координат, в которой осуществляется движение рабочего органа, и числом степеней подвижности.
ПР классифицируются по виду системы координат — ПР с прямоугольными (декартовыми), цилиндрическими, сферическими, узловыми и комбинированными координатами. В связи с этим рабочая зона может иметь вид параллелепипеда, цилиндра, шара или комбинированную форму.
Дата добавления: 2024-10-05; просмотров: 526;
Поиск по сайту
Узнать еще
- Воздух (строение и состав атмосферы)
- Изготовление составной колодки рубанка. Наладка стругов
- Мимические элементы явлений выразительности как составная часть художественного изображения личности
- Политико-воспитательная работа с личным составом ГА по обеспечению безопасности полетов
- Понятия о составных преобразователях. Делитель напряжения
- Понятия о составных преобразователях. Индуктивный делитель тока
- Смена состава лесов. Вековые смены
- Смена состава лесов. Современные смены

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
