Управление судном с винтом регулируемого шага
Известно, что обычный винт фиксированного шага может использовать полную мощность двигателя только при определенном значении сопротивления движению судна. Если это сопротивление в процессе эксплуатации судна изменяется (например, при переходе со свободного хода на режим буксировки), то винт будет соответствовать двигателю лишь при каком-либо одном значении сопротивления, а при остальных его значениях он будет либо «тяжелым» (двигатель не может развить полной частоты вращения при полной мощности), либо «легким» (винт не использует при полной частоте вращения полной мощности двигателя).
Для полного использования мощности двигателя при всех значениях сопротивления необходимо, чтобы каждому значению сопротивления соответствовал определенный шаг гребного винта. Идея совмещения серии гребных винтов различного шага в одном движителе и нашла воплощение в конструкциях ВРШ.
В настоящее время ВРШ устанавливают на судах различного назначения. Система управления всеми видами ВРШ принципиально одинакова. Винт регулируемого шага проектируется, так чтобы поворот лопастей винта осуществлялся из рулевой рубки.
Обычно установка ВРШ включает следующие основные элементы (рис. 45):
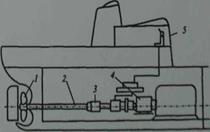 Рис. 45. Схема установки ВРШ:
1 — гребной винт; 2 — гребной вал;
3 — механизм изменения шага винта;
4 — энергетическая установка;
5 — пост дистанционной
системы управления
Рис. 45. Схема установки ВРШ:
1 — гребной винт; 2 — гребной вал;
3 — механизм изменения шага винта;
4 — энергетическая установка;
5 — пост дистанционной
системы управления
|
- гребной винт 1 с поворотными лопастями (ВПЛ). В ступице ВПЛ размещается механизм поворота лопастей (МПЛ);
- гребной вал 2;
- механизм изменения шага 3 (МИШ), состоящий из сервомотора создающего усилие для поворота лопастей, устройства для подведения энергии к сервомотору и устройства, управляющего положением лопастей;
- энергетическую часть системы управления 4, которая служит для
преобразования имеющейся на судне энергии в такой вид, который наиболее удобен для подведения к сервомотору;
- пост дистанционной системы управления 5, функции
которого заключаются в непосредственном управлении регулирующим элементом силовой части (например, распределительным золотником в ВРШ с гидравлическим приводом).
Винты регулируемого шага классифицируют по:
1) диапазону поворота лопастей:
- всережимные — лопасти могут быть зафиксированы в любом положении внутри диапазона «Полный вперед» — «Полный назад»; многопозиционные, обеспечивающие несколько режимов (чаще всего три);
- двухпозиционные — лопасти могут быть зафиксированы только в двух положениях, соответствующих крайним точкам диапазона;
2) принципу создания усилия, необходимого для поворота лопастей, т. е. с приводом:
- гидравлическим — усилие создается в гидравлическом сервомоторе;
- электромеханическим — усилие создается электродвигателем;
- механическим — усилие создается за счет энергии вращающегося гребного вала;
- ручным — перекладка лопастей производится мускульной силой человека;
3) принципу построения системы управления винтом:
- следящая система — каждому положению управляющей рукоятки соответствует определенное положение лопастей, т. е. лопасть как бы «следит» за управляющим органом;
- неследящая система — отклонение рукоятки от нейтрального положения влечет за собой поворот лопасти, а возвращение ручки в нейтральное положение останавливает лопасть.
Наибольшее распространение получили всережимные ВРШ с гидравлическим приводом и следящей системой управления.
Дата добавления: 2020-03-17; просмотров: 1137;
Поиск по сайту
Узнать еще
- D-триггер с динамическим управлением
- IV. 7. Управление состоянием окружающей среды на локальном уровне
- IX.2. Биотическое управление экосферой и роль деятельности человека
- Аварийное управление мощностью турбин электростанций
- АВАРИЙНОЕ УПРАВЛЕНИЕ ПС ОДНОЙ СЕКЦИИ.
- Автомаическое управление машинами циклического действия
- Автоматические системы с комбинированным управлением
- АВТОМАТИЧЕСКИЙ ВЫБОР ШАГА ИНТЕГРИРОВАНИЯ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
