Помехоустойчивость бинарных каналов связи
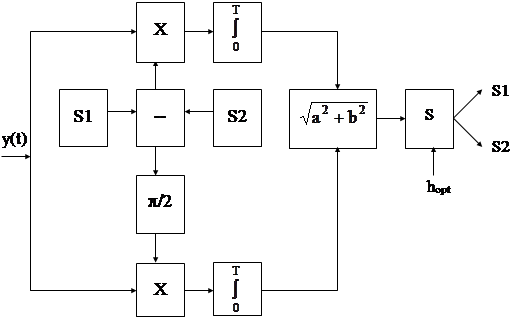 Если взглянуть на рис. 5.2 и попробовать выяснить принцип демодуляции принимаемых сигналов, то можно выяснить, что демодуляция (детектирование) производится в устройстве перемножения принимаемого сигнала с местным гетеродином, представляющим искомый сигнал. Напомним, что о сигнале известно все (форма, амплитуда, энергия, частота, фаза, длительность и т.д.), неизвестно только какой один из двух сигналов присутствует в принимаемой смеси с помехой. Если фаза сигнала известна, то и фаза напряжения также известна и совпадает с фазой сигнала. Такое детектирование называется синхронным (синхронный детектор) и соответствует наиболее точному (потенциально оптимальному) приему и обработке сигнала. Если фаза приходящего сигнала не известна, то можно вектор сигнала представить двумя проекциями на ортогональные оси (sin и cos), реализуемые двумя каналами обработки (квадратными каналами) и после автономно в каждом канале обработки, воспользовавшись правилом гипотенузы, выделить принимаемый сигнал в соответствии со схемой на рис. 5.4.
Если взглянуть на рис. 5.2 и попробовать выяснить принцип демодуляции принимаемых сигналов, то можно выяснить, что демодуляция (детектирование) производится в устройстве перемножения принимаемого сигнала с местным гетеродином, представляющим искомый сигнал. Напомним, что о сигнале известно все (форма, амплитуда, энергия, частота, фаза, длительность и т.д.), неизвестно только какой один из двух сигналов присутствует в принимаемой смеси с помехой. Если фаза сигнала известна, то и фаза напряжения также известна и совпадает с фазой сигнала. Такое детектирование называется синхронным (синхронный детектор) и соответствует наиболее точному (потенциально оптимальному) приему и обработке сигнала. Если фаза приходящего сигнала не известна, то можно вектор сигнала представить двумя проекциями на ортогональные оси (sin и cos), реализуемые двумя каналами обработки (квадратными каналами) и после автономно в каждом канале обработки, воспользовавшись правилом гипотенузы, выделить принимаемый сигнал в соответствии со схемой на рис. 5.4.
Рис. 5.4
Неизвестность начальной фазы сигнала усложняет схему обработки. Еще более усложняется схема, если неизвестно время прихода сигнала. Оптимальная обработка в этом случае приведет к созданию значительного числа параллельных каналов обработки, отличающихся только временной задержкой опорных сигналов (рис. 5.5).
 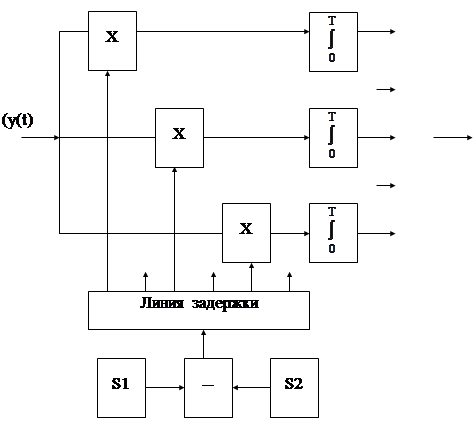 |
Рис. 5.5
Дальнейшее уменьшение априорных сведений о сигнале также будет усложнять схему обработки. Однако следует отметить, что во всех этих схемах производится детектирование (демодуляция) синхронно (с использованием известной модели сигнала). Такая демодуляция имеет повышенную (максимальную) помехоустойчивость еще и потому, что не вся энергия шума (помехи) учитывается в системе обработки. Дело в том, что обычно на входе системы имеется узкополосный фильтр (преселектор), выделяющий полосу частот примерно соответствующую спектру сигнала. Для обычных радиосигналов это достаточно узкополосный фильтр. Узкополосная помеха (шум) может быть представлена в виде колебания с медленно меняющейся амплитудой и фазой. Говорят, что узкополосность системы "замораживает" текущие процессы, что позволяет представить шум гармоническим вектором, который, в свою очередь, можно разложить на две ортогональные (квадратные) составляющие, имеющие фазовый сдвиг на π/2. Случайность помехи позволяет нам определить пространственное положение этого ортогонального разложения (Uш1 и Uш2), совместив одну ось с вектором сигнала и перпендикулярно направив вторую ось относительно вектора сигнала. Для синхронного детектора известно, что он не реагирует на сигналы, имеющие фазовый сдвиг относительно гетеродина на π/2. Таким образом, синхронное детектирование не реагирует на часть энергии шума, что обеспечивает системе максимальную (потенциальную) помехоустойчивость.
Вместе с тем, на практике, система приема и обработки принимаемого сигнала строится по схеме не синхронного детектирования, а детектирования огибающего сигнала (рис. 5.6).
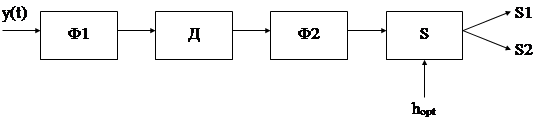 |
Рис. 5.6
Естественно предположить, что такая схема обработки (ее часто называют типовым радиотехническим звеном) будет обладать меньшей (худшей) помехоустойчивостью ввиду необходимости учитывать всю энергию помехи, а не только синхронную составляющую шума. Такая обработка принимаемой смеси (по огибающей) называется некогерентной.
Конечно, как и для когерентной разные виды модуляции будут иметь разную помехоустойчивость, хуже будет у амплитудной (АМ), лучше всего будет у фазовых видов модуляции (ФМ, ОФМ). В таблице 5.1 представлены выражения для вероятности ошибки бинарных (дискретных) видов модуляции и методов приема по мере увеличения ошибок.
Таблица 5.1
Помехоустойчивость систем связи для гауссовой помехи
| Вид модуляции | Метод приема | Вероятность ошибки |
| ФТ | когерентный | 
|
| ОФТ1 | когерентный | 
|
| ОФТ2 | корреляционный | 
|
| ОФТ3 | автокорреляционный (при ∆FT ≈ 1) |
|
| ОФТ4 | автокорреляционный (при ∆FT >> 12÷15) | 
|
| ЧТ | когерентный | 
|
| ЧТ | оптимально некогерентный | 
|
| АТ | когерентный | 
|
| АТ | оптимально некогерентный | 
|
Приведенные расчеты показывают, что помехоустойчивость приема зависит от вида модуляции и от вида обработки сигнала (когерентный или некогерентный прием). Наибольшей помехоустойчивостью обладают системы с фазовой манипуляцией, как системы с наибольшим различием бинарных сигналов (они максимально противоположны), наихудшей – с амплитудной; применение когерентного детектирования повышает помехоустойчивость при любом виде манипуляции. Следует, однако, учитывать, что для практического осуществления когерентного приема необходимо на приемном конце канала согласовывать колебания местного гетеродина с фазой одного из видов сигнала, для чего нужно иметь точную информацию о начальной фазе этого сигнала. Между тем, получение достаточно надежной оценки начальной фазы сигнала на приемном конце канала связи во многих случаях затруднительно, что ограничивает применение когерентного детектирования.
Помехоустойчивость системы связи численно определяется вероятностью ошибки передачи бинарных сигналов. Численная величина зависит от соотношения сигнал/шум.
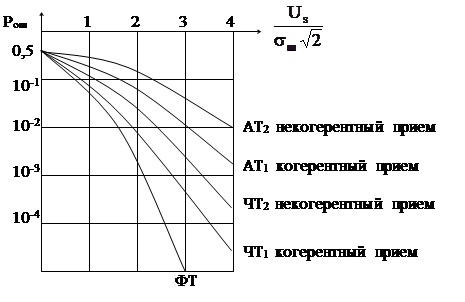 Для некоторых распространенных видов модуляции зависимость вероятности ошибок отражены на графике рис. 5.7.
Для некоторых распространенных видов модуляции зависимость вероятности ошибок отражены на графике рис. 5.7.
Рис. 5.7
Литература:
[1] стр. 179-190. [2] стр. 186-192. [3] стр. 181-187.
Контрольные вопросы:
1. В чем различие когерентного и некогерентного приема?
2. Как меняется схема обработки при увеличении неопределенности параметров передаваемых сигналов?
3. К чему приводит прием сигналов по огибающей?
4. Какие виды модуляции имеют наибольшую помехоустойчивость и почему?
5. Какие виды модуляции имеют наименьшую помехоустойчивость и почему?
5.9. Потенциальная помехоустойчивость
непрерывных каналов связи
В таких каналах передаются непрерывные сигналы, как правило, модулированные по амплитуде, частоте или фазе. оценка помехоустойчивости в этом случае производится по изменению отношения сигнал/шум на входе и на выходе системы обработки. Как показал В.А.Котельников выигрыш системы Q = n2вых / n2вх для разных видов модуляции будет:
1. для амплитудной модуляции (АМ)
 (5.21)
(5.21)
где m – глубина модуляции 0 < m < 1;
Кп – пикфактор сообщения, т.е. отношение амплитудного значения модулирующего сигнала к его эффективному значению (обычно принимают равным  = 10.
= 10.
При максимальной глубине модуляции m = 1 выигрыш системы АМ составит 2/11, т.е. получается не выигрыш, а проигрыш: на выходе системы обработки отношение сигнал/шум ухудшается почти в 5 раз.
2. для частотной модуляции (ЧМ)
 (5.22)
(5.22)
где β = ∆fд / fumax – индекс модуляции, показывающий отношение девиации несущего колебания к стандартному значению частоты модулирующего колебания (для системы ЖРЧ –β = 5, для системы "Транспот" β = 3);
∆fs – полоса спектра излучаемого сигнала (обычно ∆fs = 2β∆fu);
∆fu – полоса частот модулирующего сигнала (для телефонного канала ∆fu = 3,4 кГц).
Тогда для системы "Транспорт" (β = 3, ∆fu = 3,4 кГц):
 раз.
раз.
Выигрыш при обработке ЧМ сигналов составит 16 раз.
3. для фазомодулированных сигналов (ФМ)
 (5.23)
(5.23)
где ∆φ – девиация фаза, QФМ >> 1.
Итак, можно сделать вывод, что угловая модуляция (ЧМ, ФМ) позволяет получить значительный выигрыш при оптимальной обработке сигнала, а амплитудная модуляция (АМ) имеет ухудшение отношения сигнал/шум.
Литература:
[1] стр. 282-288. [2] стр. 307-319. [3] стр. 207-212.
Контрольные вопросы:
1. Как осуществляется оценка помехоустойчивости в непрерывных каналах связи?
2. Какой выигрыш (проигрыш) в помехоустойчивости имеют сигналы с амплитудной модуляцией?
3. Чем объясняется выигрыш в помехоустойчивости угловой модуляции?
Дата добавления: 2016-06-18; просмотров: 2991;
Поиск по сайту
Узнать еще
- IA класс — блокаторы натриевых каналов, удлиняющие ЭРП
- IB класс — блокаторы натриевых каналов, укорачивающие ЭРП
- II. Степень насыщенности, определяемая природой связи между атомами углерода.
- III КЛАСС - БЛОКАТОРЫ КАЛИЕВЫХ КАНАЛОВ, УДЛИНЯЮЩИЕ ЭРП
- IV КЛАСС - БЛОКАТОРЫ КАЛЬЦИЕВЫХ КАНАЛОВ
- IС класс — блокаторы натриевых каналов, имеющие различное влияние на ЭРП
- RC-генератор с лестничной схемой обратной связи
- А. Микрофоны с каналами связи.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
