Пример рекурсивной деконволюции.
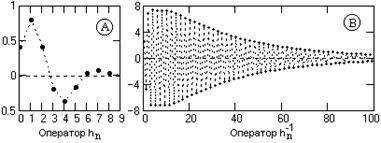 Рис.7.4.1.
Рис.7.4.1.
|
Оператор фильтра hn = {0.41, 0.791, 0.401, -0.193, -0.367, -0.166, 0.032, 0.068, 0.027, -0.001}, N=9.
1. Модуль одного из корней фильтра равен 1.032, что приводит к очень слабому затуханию инверсного оператора. Метрика приближения даже при N=100 для усеченного оператора составляет 0.3. Форма операторов приведена на рис. 7.4.1.
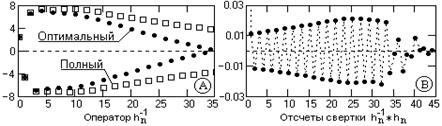 Рис.7.4.2.
Рис.7.4.2.
|
2. При использовании оптимального инверсного оператора с N=100 значение погрешности приближения уменьшается более чем в 20 раз, что позволяет уменьшить длину оператора до N=35 при погрешности приближения порядка 0.1 (рис 7.4.2(А)), при этом абсолютные значения погрешностей приближения не превышают 0.03 (рис. 7.4.2(В)).
3. Расчет коэффициентов фильтра рекурсивной деконволюции:
- G = 1/ho = 2.441
- gn = hn·G. gn = {1.932, 0.978, -0.472, -0.896, -0.405, 0.077, 0.165, 0.065, -0.003}, n=1,2,3,…,9.
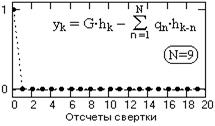 Рис. 7.4.3.
Рис. 7.4.3.
|
На рис. 7.4.3 приведены результаты рекурсивной деконволюции оператора hn. Как и следовало ожидать, деконволюция абсолютно точно, с нулевой метрикой, восстанавливает импульс Кронекера, хотя собственный импульсный отклик рекурсивного оператора повторяет оператор h-1n при его вычислении по формуле (7.2.2) и длительность его значимой части близка к 200. Естественно, что коэффициент усиления дисперсии шумов при данной операции вычисляется по значениям импульсного отклика и весьма существенен, как и для всех инверсных операторов.
7.5. Фильтры неполной деконволюции.
Рассмотренные выше методы относятся к расчету так называемых идеальных инверсных фильтров, т.е. фильтров полной прямой инверсии системных операторов. Однако использование идеальных инверсных фильтров на практике не всегда возможно, т.к. регистрируемые данные обычно осложнены влиянием помех (шумов), а инверсные фильтры обычно имеют коэффициент усиления шумов значительно больше 1. В этом случае задача точной деконволюции (восстановления истинной первоначальной формы сигнала), как правило, не ставится, и инверсные фильтры считаются оптимальными с точки зрения максимального приближения к форме полезного сигнала с определенным допустимым коэффициентом усиления дисперсии помех. Такие фильтры называются фильтрами неполной (частичной, ограниченной) деконволюции. При проектировании фильтров неполной деконволюции учитываются статистические характеристики помех во входном сигнале и их соотношение со статистическими характеристиками самого входного сигнала. Передаточная функция фильтра неполной деконволюции с учетом помех во входном сигнале определяется выражением:
H-1(z) = H*(z)/[|H(z)|2+g2], (7.5.1)
где g2 = k·sh2 - дисперсия шумов в единицах дисперсии оператора hn, sh2 – дисперсия значений оператора hn, (при условии суммы значений оператора, равной 1), k - отношение дисперсии шумов к дисперсии оператора hn. Коэффициент g2 играет роль регуляризирующего фактора при выполнении операции деконволюции информации.
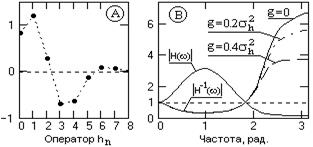 Рис. 7.5.1.
Рис. 7.5.1.
|
На рис. 7.5.1 пример формы оператора hn и спектральных функций (7.5.1) при разных значениях параметра g. При g = 0 выражение (7.5.1) обращается в идеальный инверсный фильтр 1/H(z). Во втором крайнем случае, при g2>>|H(z)|2, фильтр (7.5.1) переходит в фильтр, согласованный с сигналом по частотному спектру: H-1(z) = H*(z)/g2, который только максимизирует отношение сигнал/помеха.
На рис. 7.5.2 приведена форма инверсных операторов, соответствующая их частотным характеристикам на рис. 7.5.1(В), и результаты свертки инверсных операторов с прямым (для лучшего просмотра графики прямой оператор при свертке сдвинут вправо на 2 значения Dt). При g=0 коэффициент усиления дисперсии шумов равен 11, при g=0.4sh2 равен 4.6. Однако снижение усиления дисперсии шумов сопровождается увеличением погрешности приближения, что можно видеть на рис. 7.5.2(В), при этом уменьшается амплитуда восстановления импульса Кронекера и появляются осцилляции после импульса. Но при наличии шумов и правильном выборе параметра g общее отношение амплитудных значений сигнал/ шум для оператора по (7.5.1) больше, чем для прямой инверсии по (7.1.3), что объясняется более существенным уменьшением коэффициента усиления дисперсии шумов при увеличении параметра g, чем увеличением погрешности приближения.
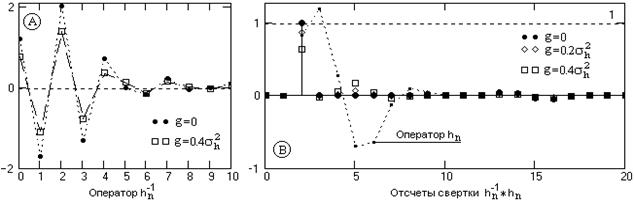 Рис. 7.5.2.
Рис. 7.5.2.
|
Операторы оптимальных фильтров также могут вычисляться с учетом помех. Если сигнал s(k) и помеха статистически независимы, то функция автоковариации сигнала на входе фильтра:
аi = asi + bi, (7.5.2)
где asi и bi - функции автоковариации сигнала и помех. При помехе типа белого шума функция автоковариации помех представляет собой весовую дельта-функцию в точке 0:
bi = c2di, (7.5.3)
где с2- дисперсия помех. С учетом этого фактора расчет оптимальных инверсных фильтров может проводиться по вышеприведенным формулам (7.3.5, 7.3.9) с изменением значения коэффициента аo:
ao= ao + c2. (7.5.4)
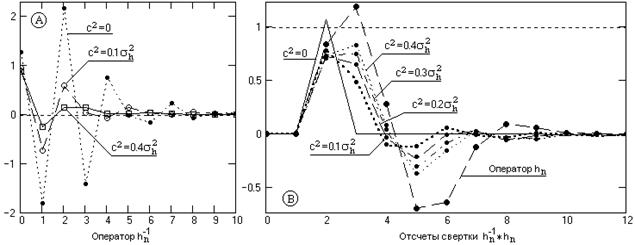 Рис. 7.5.3.
Рис. 7.5.3.
|
На рис. 7.5.3(А) приведены примеры операторов оптимальных инверсных фильтров, вычисленные по прямому оператору, приведенному на рис. 7.5.1(А). Значения коэффициента с2 заданы в долях дисперсии прямого оператора. Ввод коэффициента с2 в функцию автоковариации резко уменьшает значения коэффициентов инверсного оператора и, соответственно, уменьшает коэффициент усиления дисперсии помех. Для приведенного примера при исходном значении коэффициента усиления дисперсии шумов порядка 12 для с2=0, его значение уменьшается до 1.8 при с2=0.1s2 и становится меньше 1 при с2 > 0.3s2. Естественно, что общая погрешность приближения деконволюции при этом также существенно изменяется (см. рис. 7.5.3(В)), но амплитуда значения сигнала на месте импульса Кронекера (там, где он должен быть) изменяется много меньше, чем коэффициент усиления дисперсии шумов, а, следовательно, отношение сигнал/шум при введении коэффициента с2 существенно увеличивается.
Дата добавления: 2020-02-05; просмотров: 670;
Поиск по сайту
Узнать еще
- C04 ППВ с комментариями и примерами
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- IV. Примеры ситуационных задач
- V. ПРИМЕР РАСЧЕТА ФИЛЬТРА ВЫСОКИХ ЧАСТОТ ЧЕБЫШЕВА
- Актуальный пример разработки программы в случае моббинга
- Б) Примеры расчета магнитной цепи.
- Б.5 Пример тягового расчёта мобота.
- Более новые примеры

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
