Б.5 Пример тягового расчёта мобота.
Проведём тяговый расчёт мобота на гусеничном ходу (рис. 6,7) при следующих исходных данных:
- общий вес мобота, G=80 кг;
- продольная база, L=1 м;
- радиус ведущего колеса, R=0,125 м;
- к.п.д. редукции от вала двигателя к гусеничному обводу, h0=0,55;
- высота центра тяжести, H=0,3 м;
- расстояние между опорными катками, l=0,35 м;
- скорость передвижения в номинальном режиме, V=2,5 км/ч;
- максимальный угол подъёма amax=30°.
Оценим мощностные затраты прямолинейного движения по поверхности с лёгким уклоном f0=f+i=0,08° :
 кВт
кВт
 Вт
Вт
Максимальная тяга на лестничном марше amax=30° при f0=0,04:
 кг,
кг,
откуда согласно (9), предполагая изменения h0 незначительными имеем
 км/час
км/час
тогда
Для обеспечения такого диапазона необходимо либо использовать при наличии двух двигателей серии “D” двухскоростную трансмиссию с достаточно высоким передаточным числом порядка i=250 или применить двигатели серии “ДВМ” с меньшим числом оборотов и хорошими возможностями работы в форсированном режиме для расширения диапазона регулирования.
Следует заметить, что двигатель должен выполнять, помимо тяговых работ, операцию по изменению формы гусеничного обвода (рис. ), поэтому в результате предварительного анализа в качестве тягового двигателя привода вращения и разворота гусениц выбираем высокомоментный двигатель ДБМ70-0,16-3,2 двухсекционный с вентильным управлением.
Этот выбор обусловлен не только удовлетворительными тяговыми характеристиками двигателя, но также и габаритными размерами и конфигурацией корпуса (диаметр 70 мм, толщина 37 мм), что позволяет скомпоновать электромеханический привод в пределах объёма барабана ведущего колеса (кинематическая схема представлена на рис. 8 )
На рис. Р8 представлена тяговая характеристика электродвигателя. Двигатель имеет две жёсткие характеристики: при последовательном соединении обмоток - с номинальным режимом, при раздельном управлении обмоток - с форсированным режимом с учетверённой мощностью.
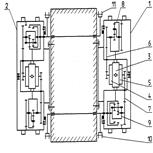
Рис 8 Кинематическая схема привода.
1 – ведущее колесо; 2 – электродвигатель; 3 и 4 – электромагнитные муфты; 5 и 6 – рядные передачи; 7 – редуктор ведущего колеса; 8 – редуктор разворота гусениц; 9 и 10 – рычаги привода.
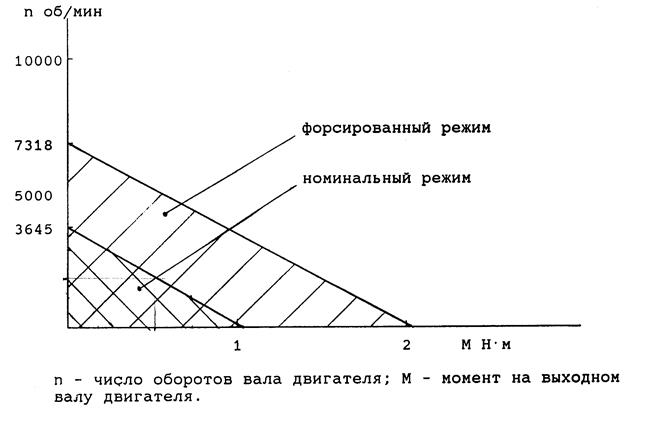
Рис. 9. Тяговая характеристика электродвигателя ДБМ70-0,16-3,2
После выбора двигателя необходимо определить передаточное отношение трансмиссии. По скорости движения передаточное отношение определяется, как:

или

Принимаем передаточное отношение  .
.
Принятое передаточное число необходимо проверить с точки зрения обеспечения моментных характеристик двигателя:

где
Рном=f0×0,5×G=32 Н
Pmax=f’0×0,5×G=f×cosamax+f×amax=212 H
тогда
 Н×м
Н×м
 Н×м
Н×м
что удовлетворяет моментным характеристикам двигателя с достаточным запасом.
Полученные результаты позволяют нам построить тяговую характеристику (рис. Р9), которая представляет собой зависимость динамического фактора D (отражает силы сопротивления движению) от угла a преодолеваемого уклона, и динамического фактора по двигателю  (отражает движущие силы) от скорости движения
(отражает движущие силы) от скорости движения  , где
, где
 ( 20 )
( 20 )
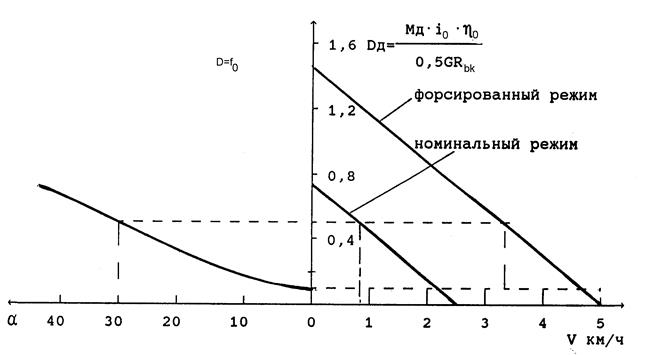
D - динамический фактор по грунту;
f0 - суммарный коэффициент сопротивления движению;
DД - динамический фактор по двигателю;
MД - момент двигателя;
i0 - передаточное отношение редуктора;
h0 - к.п.д. редукции;
G - вес шасси;
RВК - радиус ведущего колеса;
a - угол продольного уклона;
V - скорость передвижения.
Рис. 10. Тягово-скоростная характеристика ММРК.
Из представленных результатов можно заключить:
· шасси преодолевает уклон a=30° в номинальном режиме двигателя со скоростью V=0,8 км/час, в форсированном режиме V=3 км/час;
· на горизонте скорость в номинальном режиме около 2 км/час, в форсированном режиме около 4,5 км/час;
· в форсированном режиме по тяговым возможностям двигателя шасси способно преодолевать уклоны более 45° (статическая устойчивость шасси a-60°).
Буксировочное усилие или свободная сила тяги на крюке Ркр по двигателю определяется равенством  и составляет
и составляет
- в номинальном режиме до 48 кг;
- в фиксированном режиме до 100 кг.
Сила тяги на крюке по грунту определяется условиями взаимодействия движителя с грунтом, так при j=0,8 (коэффициент сцепления) Ркр=64 кг.
В завершении тягового расчёта необходимо оценить достаточность энергоёмкости аккумуляторных батарей с учётом других потребителей.
Проектируемый мобильный робот предназначен в основном для разведывательных целей и может, в зависимости от поставленных задач, содержать в своём составе следующих потребителей электроэнергии:
· тяговый электропривод;
· манипулятор;
· систему освещения.
Энергозатраты, определяющие ёмкость батарей, зависят от циклограммы работы мобота, которую могут составлять следующие режимы.
Движение:
При a=10°; h0=0,55; hэ=0,8; S1=500 м
 =45,5 Втч
=45,5 Втч
Буксировка груза:
При Ркр=30 кг и S2=100 м
 =13,1 Втч
=13,1 Втч
Работа манипулятора по подъёму грузов:
При SGГ=50 кг и высоте подъёма Н=1 м и hм=0,5
 =0,3 Втч
=0,3 Втч
Работа приборов и устройств (гамма-локатор, видеокамера, приборы и устройства иправления и пр.):
При SI=6 Oм и t=2 час A4=S I×V×t=288 час
Освещение:
При N=300 Вт и t=2 час A5=600 Втч
Суммарные энергозатраты SА=942 Втч
Энергоёмкость батареи
 =39 ам.час;
=39 ам.час;
а без освещения Е=14 ам.час
Полученные энергозатраты может обеспечить батарея аккумуляторов НЦ-25. Её максимальная нагрузка 25 А, импульсный ток 100 А, номинальное напряжение 1,6 В. Для батареи с номинальным напряжением 24 В требуется 15 аккумуляторов. Их вес (12 кг) и занимаемая площадь (500 см2) минимальны по сравнению с другими типами, количество циклов заряда-разряда 200. Они достаточно дороги, но дешевле, чем серебряно-цинковые.
Дата добавления: 2020-04-12; просмотров: 1077;
Поиск по сайту
Узнать еще
- C04 ППВ с комментариями и примерами
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- IV. Примеры ситуационных задач
- V. ПРИМЕР РАСЧЕТА ФИЛЬТРА ВЫСОКИХ ЧАСТОТ ЧЕБЫШЕВА
- А.4 Общее уравнение движения мобота.
- Автоматизация расчета и построения базовых конструкций одежды
- Актуальный пример разработки программы в случае моббинга

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
