Системы откренивания
Основные сведения
Системы откренивания судов предназначены для выравнивания грузовой палубы на судах с горизонтальным способом погрузки ( суда типа ро-ро, от англ. roll-in – вкатывать, roll-out – выкатывать ).
Выравнивание палубы:
1. исключает опрокидывание колёсной техники при её въезде на палубу;
2. исключает перекосы палубы.
Для устранения крена судна перемещают воду из балластных танков одного борта в такие же танки другого борта.
Различают 2 вида систем откренивания:
1. с перекачивающим насосом;
2. с электрокомпрессором.
В первом случае для перемещения воды применяют насос, во втором – давление воздуха.
Для контроля крена используют специальные приборы - кренометры, а в автомати зированных системах - электрические датчики крена ( индуктивные или ватерпасные ).
1. Система откренивания судна с перекачивающим насосом
Основные элементы схемы ( рис.298, а ):
1. ТЛ, ТП - танки левого и правого борта; в нормальных условиях заполнены наполовину;
2. КЛ, КП - кингстоны забортной воды левого и правого борта;
3. Н - насос;
4. К1... К4 - реверсивные клапаны, управляемые воздухом;
5. К5 - клапан заполнения танков ТЛ и ТП через кигстоны КЛ и КП;
6. Кб - клапан слива воды из танков ( осушительный клапан ).
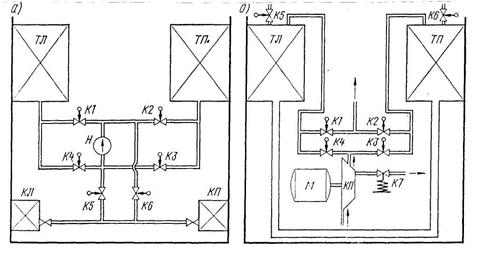
Рис. 298. Системы откренивания судна: а ) с перекачивающим насосом;
б ) с перекачкой посредством избыточного давления воздуха в танках;
1.1. Принцип действия системы
Основан на перемещении воды из одного танка в другой при помощи насоса. Возможны 2 режима работы системы:
1. выравнивание крена;
2. заполнение танков или слив воды из них.
1.2. Исходное состояние
В исходном состоянии крен отсутствует, клапаны К1.. .Кб закрыты, насос Н не работает.
1.3. Выравнивание крена
Для контроля крена используют специальный прибор - кренометр.
Пусть образовался крен на правый борт.
Для устранения крена воду перекачивают из ТП в ТЛ, при этом открывают нечёт
ные клапаны КЗ, К1 и включают насос.
Вода перемещается таким образом: ТП-КЗ-Н-К1-ТЛ.
После устранения крена ( контроль - по кренометру) закрывают клапаны КЗ, К1 и отключают насос Н.
При крене на левый борт открывают чётные клапаны К4, К2 и включают насос.
Вода перемещается таким образом: ТЛ - К4 - Н - К2 - ТЛ.
1.4. Заполнение танков водой
Для заполнения танков водой используегся клапан К5.
Пусть необходимо заполнить водой танк левого борта ТЛ. Для этого открывают
кингстон КЛ или КП, клапаны К5 и К1 и включают насос Н.
Вода перемещается таким образом: КЛ ( КП ) - К5 - Н - К1 - ТЛ.
При достижении необходимого уровня отключают насос и закрывают клапаны и кингстоны.
Для заполнения водой танка правого борта открывают кингстон КЛ или КП, кла-
паны К5 и К2 и включают насос Н.
Вода перемещается таким образом: КЛ ( КП ) - К5 - Н - К2 - ТП.
При достижении необходимого уровня поступают так, как описано выше.
1.5. Слив воды из танков
Для слива воды из танков используется клапан Кб. Пусть необходимо слить воду
из танка левого борта ТЛ.
Для этого открывают кингстон КЛ или КП, клапаны К4 и Кб и включают насос Н Вода перемещается таким образом: ТЛ - К4 - Н - Кб - КЛ ( КП).
При достижении необходимого уровня отключают насос и закрывают клапаны и кингстоны.
Пусть необходимо слить воду из танка правого борта ТП.
Для этого открывают кингстон КЛ или КП, клапаны КЗ и Кб и включают насос Н
Вода перемещается таким образом: ТП - КЗ - Н - Кб - КЛ ( КП).
2. Системы откренивания с электрокомпрессором
Основные элементы схемы ( рис. 298,6)
1. ТЛ, ТП - танки левого и правого борта; в нормальных условиях заполнены на половину;
2. КП - компрессор;
3. М - электродвигатель компрессора;
4. К1.. .К4 - реверсивные клапаны, управляемые воздухом;
6. К5, Кб - предохранительные воздушные клапаны танков левого и правого бор-
та;
6. К7 - клапан стравливания воздуха из компрессора.
2.1. Принцип действия системы
Основан на перемещении воды из одного танка в другой при помощи воздуха.
В данной системе компрессор работает непрерывно, при повышении давления
воздуха выше допустимого автоматически открывается клапан К7, через который избыток воздуха стравливается в атмосферу.
2.2. Исходное состояние
В исходном состоянии крен отсутствует, клапаны К1...Кб закрыты. Периодически
открывается клапан К7.
Выравнивание крена
Пусть образовался крен на правый борт.
Для устранения крена воду перекачивают из ТП в ТЛ, при этом открывают нечетные клапаны КЗ, К1.
Через клапан КЗ воздух поступает в верхнюю часть ТП, поэтому давлением воздуха вода вытесняется из ТП в ТЛ.
Давление воздуха в верней части ТЛ возрастает, избыток воздуха стравливается в атмосферу через клапан К1.
При выравнивании крена клапаны КЗ и К1 закрываются.
При крене на левый борт открывают клапаны К4 и К2.
Через клапан К4 воздух под давлением поступает в верхнюю часть ТЛ, вода вытесняется в ТП. Избыток воздуха из верхней части ТП стравливается в атмосферу через клапан К2.
При выравнивании крена клапаны К4 и К2 закрываются.
При чрезмерном повышении давления воздуха в танках ( например, если неисправны клапаны К1 или К2 ) открываются аварийные клапаны К5 или Кб, стравливая избыток воздуха в атмосферу.
3. Автоматизация откренивания
Устройство системы автоматического откренивания принципиально не зависит от способа принудительной перекачки воды между бортовыми танками ( рис.299 ).
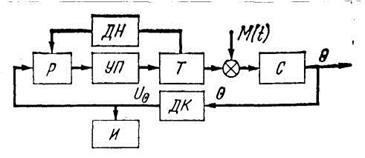
Рис. 299. Структурная схема автоматического откренивания судна:
К основным элементам схемы относятся:
1. С-судно;
1. ДК - датчик крена;
2. Р - регулятор, включающий систему управления перекачкой;
3. УП - система управления перекачкой;
4. Т - бортовой танк ( танки );
6. ДН - датчики наполнения танков водой, для прекращения перекачки и вклю-
чения сигнализации при предельном максимальном уровне воды в танке;
7. М (t) - внешнее возмущение, вызывающее образование крена ( например, не-
равномерное по весу размещение техники по бортам );
8. И - индикатор ( указатель ) крена на щите управления системы и в ЦПУ;
9. θ - угол крена судна;
10. U (θ ) - напряжение на выходе датчика крена, пропорциональное углу крена.
Работа схемы
При появлении крена судна датчик крена ДК вырабатывает напряжение U (θ ), пропорциональное углу крена судна.
Это напряжение поступает на регулятор Р, который включает систему управления перекачкой УП.
Начинается перекачка воды между танками.
При исчезновении крена напряжение U (θ ) уменьшается до нуля, при этом отклю-
чается система управления перекачкой УП.
Предельные уровни воды в танках контролируются датчиками наполнения ДН, кото-
рые при достижении предельного уровня воды прекращают перекачку и включают сигна-
лизацию.
При разрыве контура обратной связи с датчиком ДН система переводится в режим ручного управления.
В этом случае контроль угла крена осуществляется визуально по измерительным приборам – кренометрам.
Дата добавления: 2020-02-05; просмотров: 857;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
