Гидравлические и комбинированные механизмы управления насосами переменной подачи
Вместо электрического сервопривода с редуктором ДФР и шпинделем некоторые фирмы применяют гидравлические или комбинированные механизмы ( рис. 270 ).
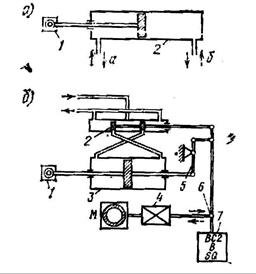
Рис. 270. Сервомеханизмы РЭГ-приводов: а – гидравлический; б – электрогидравлический ( комбинированный )
На рис. 270, а показан сервоцилиндр 2, шток поршня которого 1, связанный с диф
ференциальным рычагом, аналогично каретке, своим перемещением задает эксцентриси-
тет насоса.
Подача масла в сервоцилиндр 2 осуществляется через золотниковое устройство по схеме, аналогичной рис. 266. Сервопривод питается от специального малого шестеренча
того насоса, обычно встраиваемого в главный насос переменной подачи.
На рис. 270, б представлен электрический сервопривод с промежуточным гидроусилителем.
Такая схема широко используется в отечественных рулевых системах (РЭГ-8). Гидроусилитель состоит из золотника 2 и силового цилиндра, шток поршня которого 1 действует на управляющий рычаг манипулятора насоса. Дифференциальный рычаг 5 обеспечивает жесткую обратную связь между золотником и рабочим поршнем.
Передвигая с помощью серводвигателя М и рычажной системы золотник 2, сообща
ют полости цилиндра 3 со вспомогательным насосом.
Шток поршня при перемещении возвращает через рычаг 5 золотник в нейтральное положение. Дифференциальный рычаг 5 в гидроусилителе превращает его в следящее устройство, где положение выходной каретки 1 всегда четко связано с перемещением входного рычага 6, на который через редуктор 4 воздействует серводвигатель М.
Поэтому датчики аксиометра заданного положения руля ВС2, конечные выключа-
тели, элементы обратной связи В связаны непосредственно с входным органом гидроуси-
лителя.
Мощность серводвигателей составляет 10 - 15 Вт. В качестве двигателей использу-
ются хорошо управляемые и регулируемые бесконтактные высоконадежные двухфазные асинхронные машины с полым ротором ( двигатели Феррариса ).
Исполнительные устройства систем управления гидравлических руле-
Вых машин
Основные сведения
Исполнительные устройства предназначены для непосредственного воздействия на
насосы гидравлических рулевых машин.
Эти устройства располагаются внутри исполнительных механизмов ( ИМ ), при-
строенных непосредственно к насосам, находящимся в румпельном отделении.
К исполнительным устройствам систем управления гидравлических рулевых машин относятся:
1. серводвигатели;
2. электромагнитные муфты;
3. пружинные нулевые установители.
Серводвигатели
Серводвигатели – это электрические двигатели мощностью 10…15 Вт, предназна-
ченные для перемещения рабочих органов насосов переменной подачи.
Такими органами является:
1. у радиально-плунжерных насосов ( Холла ) – барабан;
2. у аксиально-плунжерных насосов – поворотная люлька.
Если при помощи серводвигателя вывести барабан насоса из нулевого положения
( повернуть люльку ), перо руля начинается поворачиваться, если же вернуть барабан ( люльку ) в исходное ( нулевое ) положение, перо руля остановится.
В качестве серводвигателей используются 3- и 2-фазные асинхронные двигатели.
На судах отечественного производства используются 2-фазные асинхронные двига
тели серии АДП ( А – асинхронный, Д – двигатель, П – полый ротор ) ( рис .271 ).
 .
.
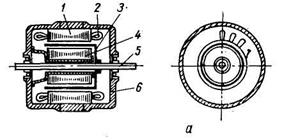
Рис. 271. Асинхронный двигатель серии: а – устройство; б – схема включения;
1 – внешний статор; 2 – обмотка возбуждения ( управления ); 3 – полый ротор;
4 – внутренний статор; 5 – вал; 6 – подшипниковый щиток
Двигатель имеет два статора – внешний 1 и внутренний 4. Последний закреплен на одном из подшипниковых щитков и служит для уменьшения магнитного сопротивления на пути основного магнитного потока.
На внешнем статоре двигателя уложены две обмотки: обмотка возбуждения ОВ и обмотка управления ОУ. Оси этих обмотки расположены под углом 90°, поэтому их маг-
нитные потоки сдвинуты в пространстве на такой же угол.
На обмотку возбуждения подается стабильное напряжение U  величиной 36, 40 или 110 В ( в зависимости от типа двигателя ).
величиной 36, 40 или 110 В ( в зависимости от типа двигателя ).
На обмотку управления ОУ с выхода усилителя системы управления РЭП ( магнит-
ного или электронного ) подается напряжение управления U  , которое может изменяться как по величине, так и по фазе.
, которое может изменяться как по величине, так и по фазе.
В щель между внешним и внутренним статорами вставлен полый ротор 3, который
сидит на валу 5. Вал свободно вращается на подшипниках, установленных в щитках 6.
Ротор выполнен в виде тонкостенного латунного стакана, что позволило свести к минимуму его инерционность – ротор быстро разгоняется и быстро останавливается.
В цепь обмотки возбуждения включен конденсатор С, поэтому ток в этой обмотке
сдвинут на 90° ( в сторону опережения ) по отношению к току в обмотке управления.
Такой двойной сдвиг – обмоток на статоре на 90° ( в пространстве ) и токов в них
на 90° ( электрических – на векторной диаграмме ) позволил получить при помощи этих обмоток вращающееся магнитное поле.
Это поле при вращении пересекает стенки полого ротора и индуктирует в них ЭДС В роторе возникает ток, который, взаимодействуя с вращающимся магнитным полем, вызывает образование электромагнитного момента – ротор начинает вращаться.
Скорость ротора тем больше, чем больше напряжение U на обмотке управления.
Если фазу этого напряжения изменить на обратную ( на 180°), ротор реверсирует.
Дата добавления: 2020-02-05; просмотров: 951;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- III. Механизмы, средства и методы психологического воздействия.
- Money Management - основы управления капиталом
- VI.НЕЙРОХИМИЧЕСКИЕ МЕХАНИЗМЫ ПЛАСТИЧНОСТИ И ПАМЯТИ.
- Автоматизация процессов управления перевозками
- АВТОМАТИЗАЦИЯ СТРАТЕГИЧЕСКИХ ЗАДАЧ УПРАВЛЕНИЯ
- Автоматизация управления процессами производства синтетического каучука
- Автоматизированная Система Оперативного Управления Перевозками (АСОУП)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
