Дроссельный механизм с электромашинным приводом
Применяется в отечественных авторулевых АТР, «АИСТ», «Печора», авторулевых «Функверк Кёпеник», выпускаемых в ГДР. На рис. 267 показана схема кинематического механизма, имеющего заводской индекс ИМ-2, предназначенного для управления насоса-
ми нерегулируемой подачи в схеме АТР.
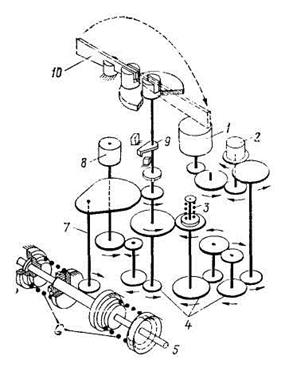
Рис. 267. Кинематическая схема исполнительного механизма ИМ-2 для управления насосами постоянной подачи РЭГ-приводов
Электродвигатель 1 через шестеренчатую механическую передачу 4 перемещает выходную рейку 5, связанную с дросселирующим золотником. При отключении электро-
двигателя пружинами 6 нулевого установителя золотник возвращается в исходное положе
ние.
Для уменьшения времени возврата и соответственно сокращения выбега руля кинематическая связь серводвигателя 1 и рейки 5 на этот период может быть разорвана посред
ством электромагнитной муфты 2. Исследования показали, что эффективность работы муфты сравнительно невелика. Поэтому в управляющих механизмах авторулевых «АИСТ», «Печора» от ее использования отказались.
Максимальное перемещение выходного органа регулируется механическим ограничителем 9.
Пружинная муфта проскальзывания 3 исключает стоянку серводвигателя под током при достижении предельного положения.
Рукоятка 10 служит для местного ( аварийного ) ручного управления рулем непосредственно из румпельного отделения.
Обратная связь по положению управляющей рейки осуществляется от сельсина-трансформатора 8.
Механизмы управления насосами переменной подачи
Основные сведения
Для перекладки руля в электрогидравлических системах с насосом переменной подачи требуется сместить манипулятор насоса (создать эксцентриситет). Это достигает
ся вспомогательным сервоприводом, вкотором используются передачи электрического и гидравлического типов.
При электрической системе передачи оперативные функции в румпельном отделе
нии выполняет ЭД, называемый серводвигателем.
При гидравлической системе передачи для воздействия на манипулятор использу
ют гидравлический серводвигатель (типа толкателя). Процесс перекладки руля при уп-
равлении сервоприводом содержит 4 основные операции:
1. включение сервопривода;
2. отключение в положении, когда задана максимальная подача насоса;
3. обратное включение сервопривода ( реверс );
4. отключение его точно в позиции нулевой последовательности.
Точная остановка манипулятора в нейтральном положении в условиях, когда
сервопривод обладает свойством выбега после отключения благодаря запасенной энер-
гии в движущихся частях, при описанном способе методом отдельных операций практи
чески невозможна.
Поэтому для упрощения способа управления рулем, обеспечения устойчивости управления сервопривод снабжают кинематическим устройством, связывающим задаю-
щий орган, манипулятор насоса и баллер руля.
Рассмотрим некоторые из таких механизмов.
Дата добавления: 2020-02-05; просмотров: 916;
Поиск по сайту
Узнать еще
- A) четырехшарнирный механизм
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- R-плазмиды, функции, строение. Пути передачи. Механизм множественной лекарственной устойчивости.
- VI.НЕЙРОХИМИЧЕСКИЕ МЕХАНИЗМЫ ПЛАСТИЧНОСТИ И ПАМЯТИ.
- Алгоритм проектирования кулачкового механизма по допустимому углу давления
- Аллергические реакции 1 типа (реагиновые). Стадии, медиаторы аллергии 1 типа, механизмы их действия. Клинические проявления (анафилактический шок, атопические реакции).
- АНАЛИЗ МЕХАНИЗМА ЦЕНООБРАЗОВАНИЯ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
