Механизм управления НПП с кулачковым дифференциалом
Применяется в отечественных рулевых машинах РЭГ-2, РЭГ-3.
Показан на рис. 269.
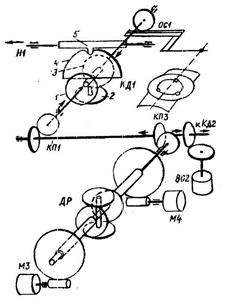
Рис. 269. Кинематическая схема рулевого сервомеханизма с кулачковым дифференциалом
Механизм управления включает в себя дифференциальный редуктор ДР, связанный через червячные зацепления с электрическими серводвигателями МЗ, М4, соответственно правого и левого борта.
Через промежуточные передачи КПЗ, КП1 (КП2 — на правый борт) управляющее действие передается на шестерню 1 кулачкового дифференциала КД1, который и является элементом, суммирующим движения задающего валика (шестерня 1) и валика обратной связи (шестерня 3).
Обратная связь (0С1) выполнена в виде зубчатого колеса, обкатывающегося по рейке, закрепленной на ползунах рулевой машины. В дифференциальном кулачковом редукторе ДР1 при повороте сателлита 2 получает перемещение жестко связанный с ним профильный кулачковый диск 4.
Диск 4 находится в кулачковом зацеплении с рейкой манипулятора насоса H1. Поворот кулачка 4 вызовет линейное перемещение манипулятора, причем зависимость между углом поворота диска и сдвигом манипулятора нелинейная, определяемая не только профилем кулачкового зацепления, но и диаметром диска.
Перемещение манипулятора будет происходить при малых углах поворота диска (соответствующих 4 - 5° поворота руля). При углах, больших 4 - 5°, линейно движущийся кулачок 5 выходит из углубления и скользит по ребру диска 4. Таким образом подача насоса нарастает только при малых углах поворота кулачкового элемента и остается постоянной при больших углах.
Угол поворота кулачка 4 будет равен разности углов поворота задающей шестерни 1 и шестерни обратной связи 3. В исходном положении эта разность равна нулю.
Кулачковый диск стоит в положении, когда насос не имеет подачи.
При работе задающая шестерня 1 посредством одного из серводвигателей, управля
емого из рулевой рубки, перемещается на некоторый угол, соответствующий необходимой перекладке руля.
Угол поворота контролируется по двухстрелочному аксиометру, один из сельси-
нов-приемников которого связан с сельсином-датчиком ВС2, работающим от задающего валика. Вместе с шестерней 1 повернется и кулачковый диск 4. Обеспечивается смещение манипулятора и соответствующая подача насоса. Руль будет перекладываться в заданном направлении.
По каналу обратной связи шестерня 3 будет перемещать кулачковый диск в обратном направлении.
Подача насоса прекратится, когда положение отрабатывающей шестерни 3 будет строго соответствовать положению управляющей шестерни 1, т. е. когда руль переложит-
ся на заданный угол.
В схемах управления следящего и автоматического действия обратная связь по углу перекладки руля вводится не от баллера, а от задающего валика. От него также приводится в действие путевой механизм с конечными выключателями.
Дата добавления: 2020-02-05; просмотров: 851;
Поиск по сайту
Узнать еще
- A) четырехшарнирный механизм
- B. Департаменты и управления функционального характера.
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- Money Management - основы управления капиталом
- R-плазмиды, функции, строение. Пути передачи. Механизм множественной лекарственной устойчивости.
- VI.НЕЙРОХИМИЧЕСКИЕ МЕХАНИЗМЫ ПЛАСТИЧНОСТИ И ПАМЯТИ.
- Автоматизация процессов управления перевозками

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
