Дослідження руху механізмів методом Віттенбауера
Цей метод випливає з відомої залежності кінетичної енергії механізму.

У цій формулі Jзв _ зведений момент інерції, а w - кутова швидкість ланки зведення механізму (машини). Залежність (4.55) можна записати так:

Таким чином, кутову швидкість ланки зведення у кожному положенні механізму можна визначити, знаючи відношення його кінетичної енергії до зведеного моменту інерції, взятих для цього ж положення. Інакше кажучи, треба мати залежність T = T(JЗВ), яка встановлює зв'язок між кінетичною енергією Т і зведеним моментом інерції Jзв. Цю задачу зручно розв'язувати графічно. Спочатку будують діаграми кінетичною енергії Т =T(  ) і зведеного моменту інерції Jзв =Jзв
) і зведеного моменту інерції Jзв =Jзв  залежно від кута повороту ланки зведення, потім, на основі цих діаграм, будують діаграму T = T(JЗВ), виключивши спільний параметр
залежно від кута повороту ланки зведення, потім, на основі цих діаграм, будують діаграму T = T(JЗВ), виключивши спільний параметр  . Якщо побудова діаграми Jзв = Jзв(
. Якщо побудова діаграми Jзв = Jзв(  ) не складає труднощів (це питання ми розглянули вище п.4.7). то для побудови діаграми Т = T(
) не складає труднощів (це питання ми розглянули вище п.4.7). то для побудови діаграми Т = T(  ) необхідно мати діаграми зведених моментів рушійних сил Мр =Мр (
) необхідно мати діаграми зведених моментів рушійних сил Мр =Мр (  ) і сил опору М0 =М0(
) і сил опору М0 =М0(  ). Такі діаграми
). Такі діаграми
будують на основі механічних характеристик двигунів і робочих машин. Практично це досить складні задачі, які, як правило, розв'язуються з певними припущеннями.
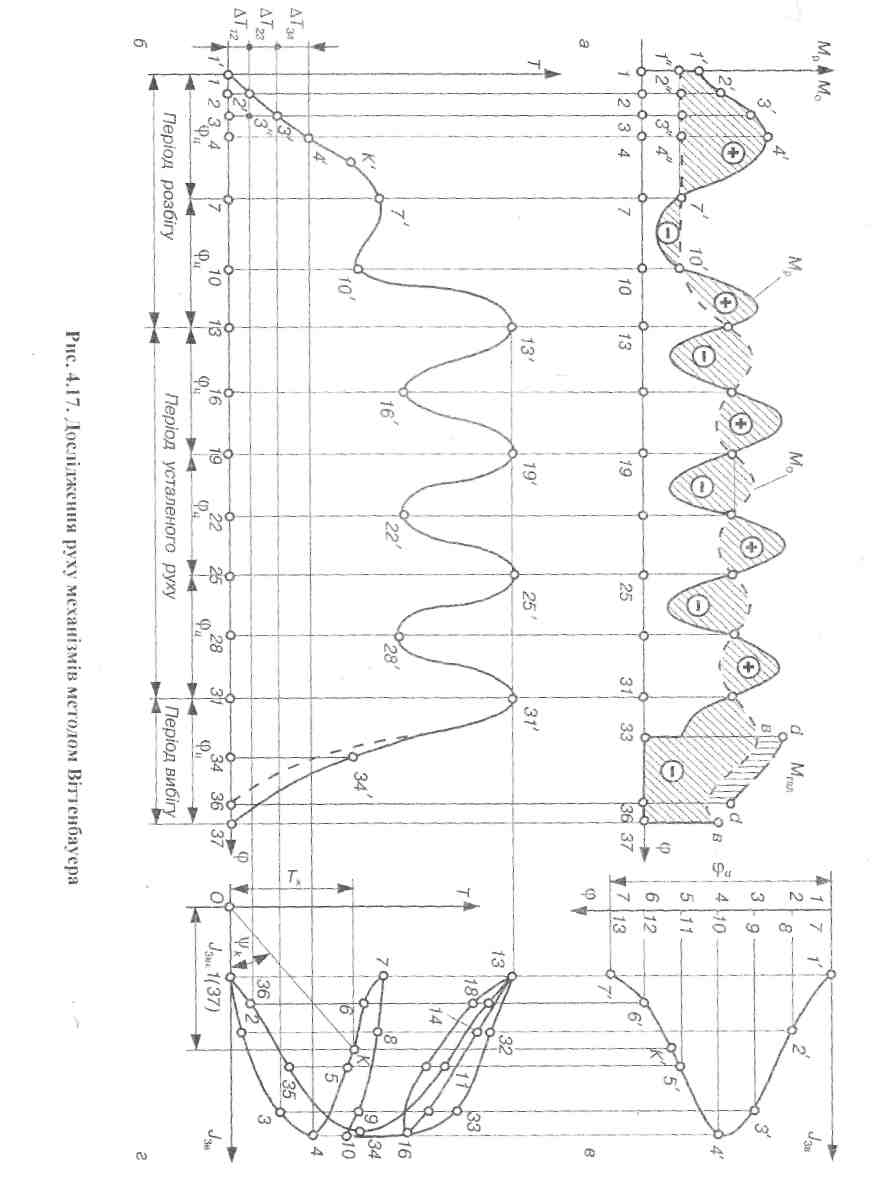
Нехай задано діаграми зведених моментів рушійних сил Мр = Мр(  ) і сил опору М0 = М0(ф) у функції кута повороту початкової ланки (рис. 4.17, а) [1]. Маючи такі діаграми, можна знайти роботи рушійних сил і сил опору на вибраному інтервалі за допомогою наступних формул:
) і сил опору М0 = М0(ф) у функції кута повороту початкової ланки (рис. 4.17, а) [1]. Маючи такі діаграми, можна знайти роботи рушійних сил і сил опору на вибраному інтервалі за допомогою наступних формул:

де кут  - кут повороту ланки зведення. Величина цих робіт виражається у масштабі площею, що обмежена відповідною кривою Мр=Мр (
- кут повороту ланки зведення. Величина цих робіт виражається у масштабі площею, що обмежена відповідною кривою Мр=Мр (  ) чи М0 = М0(
) чи М0 = М0(  ), віссю ф і крайніми ординатами вибраного інтервалу
), віссю ф і крайніми ординатами вибраного інтервалу 
 ,
,
Приріст кінетичної енергії механізму за будь-який проміжок часу, що виражається рівнянням

дорівнює різниці площі кривих Мр=Мр (  ) і М0 =М0(
) і М0 =М0(  ), помноженій на відповідні масштаби моментів
), помноженій на відповідні масштаби моментів  м і кута повороту
м і кута повороту  .
.
Отже, зміна кінетичної енергії завжди пропорційна площі, яка знаходиться між кривими моментів рушійних сил і сил опору (на рис. 4.17,а ці площі заштриховані). Цим площам треба приписувати знак „+" або „-" залежно від того, яка робота буде більша: моменту рушійних сил чи моменту сил опору. Підрахувавши величину площі вказаних вище площадок, можна побудувати діаграму T=T(  ) зміни кінетичної енергії ланки зведення у функції кута повороту
) зміни кінетичної енергії ланки зведення у функції кута повороту  (рис. 4.17,6). Побудову почнемо з першого інтервалу 1-2. Обчислюємо площу (1
(рис. 4.17,6). Побудову почнемо з першого інтервалу 1-2. Обчислюємо площу (1  2'2"1") у квадратних міліметрах. Нехай ця площа дорівнює S12 , мм2, тоді приріст кінетичної енергії на цьому інтервалі буде
2'2"1") у квадратних міліметрах. Нехай ця площа дорівнює S12 , мм2, тоді приріст кінетичної енергії на цьому інтервалі буде

|
Оскільки механізм почав рухатися з положення, що відповідає точці 1, то, очевидно, що початковий запас кінетичної енергії Т1 дорівнює нулю і повний запас кінетичної енергії механізму в положенні 2 виразиться величиною Т2 =  T12. Цю величину відкладаємо у вигляді відрізка 2-2' у масштабі
T12. Цю величину відкладаємо у вигляді відрізка 2-2' у масштабі 
 на ординаті, проведеній у точці 2 (рис. 4.17, б). Маємо
на ординаті, проведеній у точці 2 (рис. 4.17, б). Маємо

Далі обчислюємо наступну площу S23 = (2"2'3'3"), мм2. На підставі попереднього маємо  Т23 =Т3—Т2 =
Т23 =Т3—Т2 =  =
=  (3-3), тобто приріст кінетичної енергії на ділянці 2-3 виражається площею (2"2'3'3") мм , помноженою на добуток масштабів \ім і цф . Знайдену величину
(3-3), тобто приріст кінетичної енергії на ділянці 2-3 виражається площею (2"2'3'3") мм , помноженою на добуток масштабів \ім і цф . Знайдену величину  T23 відкладаємо на ординаті в точці 3 у вигляді відрізка З"-З' у масштабі
T23 відкладаємо на ординаті в точці 3 у вигляді відрізка З"-З' у масштабі  , додаючи його до попереднього відрізка - (3-3')=(2-2')+(3"-3') і т.п. Ординати діаграми кінетичної енергії збільшуються до положення 7, де в точці 7' вона має вершину, що відповідає одному з максимумів кінетичної енергії. Далі на ділянці 7-10 крива опускається, оскільки заштрихована площа, що міститься між цими точками осі абсцис, має знак "-" (М0 > Мр). Починаючи з точки 10, крива кінетичної енергії підіймається до положення 13, де ця крива знов має вершину у точці 13' і т.п. На ділянці 13-31, де діаграма описує усталений рух, крива повторюється через кожний цикл руху механізму, що відповідає куту
, додаючи його до попереднього відрізка - (3-3')=(2-2')+(3"-3') і т.п. Ординати діаграми кінетичної енергії збільшуються до положення 7, де в точці 7' вона має вершину, що відповідає одному з максимумів кінетичної енергії. Далі на ділянці 7-10 крива опускається, оскільки заштрихована площа, що міститься між цими точками осі абсцис, має знак "-" (М0 > Мр). Починаючи з точки 10, крива кінетичної енергії підіймається до положення 13, де ця крива знов має вершину у точці 13' і т.п. На ділянці 13-31, де діаграма описує усталений рух, крива повторюється через кожний цикл руху механізму, що відповідає куту  ц, причому ордината її досягає то свого максимуму, то свого мінімуму. У положенні 31 ордината кривої Т = T(
ц, причому ордината її досягає то свого максимуму, то свого мінімуму. У положенні 31 ордината кривої Т = T(  ) має останній максимум, після чого спадає завдяки наявності на ділянці 33-37 тільки сил опору, а на ділянці 31-33 М0 > Мр . Точка 37 відповідає моменту зупинки механізму, тобто повному вичерпанню кінетичної енергій нагромадженої в період розгону. Очевидно, що витрати цієї енергії можна прискорити, ввівши додаткові опори (гальма). На рис. 4.17, а, б гальмівний момент Мгал і кінетична енергія Т відповідно зображені штриховими лініями.
) має останній максимум, після чого спадає завдяки наявності на ділянці 33-37 тільки сил опору, а на ділянці 31-33 М0 > Мр . Точка 37 відповідає моменту зупинки механізму, тобто повному вичерпанню кінетичної енергій нагромадженої в період розгону. Очевидно, що витрати цієї енергії можна прискорити, ввівши додаткові опори (гальма). На рис. 4.17, а, б гальмівний момент Мгал і кінетична енергія Т відповідно зображені штриховими лініями.
Отже, за весь час роботи механізму від точки 1 до точки 37 приріст кінетичної енергії дорівнює нулю, тобто сума всіх заштрихованих площадок із знаком „+" повинна дорівнювати сумі площадок із знаком „-", оскільки в момент пуску механізму і в момент його зупинки швидкість ланки зведення дорівнює нулю Така сама рівність повинна мати місце і за час усталеного руху (13-31), оскільки у цьому випадку швидкість ланки зведення механізму через кожний цикл повертається до попереднього значення. На рис. 4.17, а умовно показано три повних цикли  ц усталеного руху. Практично число цих циклів може бути різним залежно від часу безперервної роботи машини.
ц усталеного руху. Практично число цих циклів може бути різним залежно від часу безперервної роботи машини.
Діаграму зведених моментів інерції досить побудувати тільки для одного циклу  ц роботи механізму (рис. 4.17, в), оскільки Jзв є функцією положень механізму
ц роботи механізму (рис. 4.17, в), оскільки Jзв є функцією положень механізму  (див. п. 4.7). Для зручності наступної побудови кривої Віттенбауера діаграму JЗВ=JЗВ(
(див. п. 4.7). Для зручності наступної побудови кривої Віттенбауера діаграму JЗВ=JЗВ(  ) повернуто на 90°.
) повернуто на 90°.
Маючи діаграми T= Т(  ) і JЗв = Jзв(
) і JЗв = Jзв(  ),будуємо діаграму T = T(JЗВ) (рис. 4.17,г), для цього на осі ординат відкладаємо значення кінетичної енергії, що визначаються відрізками 1-1, 2-2', 3-3' і т.д. діаграми Т =T(
),будуємо діаграму T = T(JЗВ) (рис. 4.17,г), для цього на осі ординат відкладаємо значення кінетичної енергії, що визначаються відрізками 1-1, 2-2', 3-3' і т.д. діаграми Т =T(  ), а по осі абсцис - значення зведеного моменту інерції, що визначається відрізками 1-Г, 2-2', 3-3' і т.д. діаграми JЗВ=JЗВ(
), а по осі абсцис - значення зведеного моменту інерції, що визначається відрізками 1-Г, 2-2', 3-3' і т.д. діаграми JЗВ=JЗВ(  ).Знайдені точки 1, 2, 3 і т. п. у системі координат Т - Jзв послідовно з'єднуємо плавною кривою, дістаємо криву кінетичної енергії Т у функції зведеного моменту інерції, тобто залежність Т = T(JЗВ) . Цю криву називають кривою Віттенбауера за ім'ям австрійського вченого, який вперше розглянув цей метод.
).Знайдені точки 1, 2, 3 і т. п. у системі координат Т - Jзв послідовно з'єднуємо плавною кривою, дістаємо криву кінетичної енергії Т у функції зведеного моменту інерції, тобто залежність Т = T(JЗВ) . Цю криву називають кривою Віттенбауера за ім'ям австрійського вченого, який вперше розглянув цей метод.
За допомогою кривої Віттенбауера легко встановити залежність кутової швидкості ланки зведення у функції кута повороту ер. Для цього виберемо на кривій Т = T(Jзв) будь-яку точку К і з'єднаємо цю точку з точкою 0 - початком координат (рис. 4,17, г). Позначимо кут, утворений прямою 0K з віссю абсцис, через  к, Оскільки по осі абсцис відкладено зведений момент інерції IзвК у масштабі
к, Оскільки по осі абсцис відкладено зведений момент інерції IзвК у масштабі  , а по осі ординат - кінетичну енергію Тк у масштабі
, а по осі ординат - кінетичну енергію Тк у масштабі  які відповідають точці К, то очевидно, що відношення цих величин дасть тангенс кута
які відповідають точці К, то очевидно, що відношення цих величин дасть тангенс кута  нахилу кривої ОК до осі Jзв , тобто:
нахилу кривої ОК до осі Jзв , тобто:

де Jзв=0К1 
Тоді швидкість ланки зведення в положенні, яке визначається точкою К, знаходимо за формулою (4.56), тобто

Аналогічно визначають швидкості ланки зведення в інших положеннях механізму. Використовуючи ці значення, можна побудувати графік кутової швидкості w ланки зведення у функції кута  (див. рис. 4.14),тобто графік w= w(
(див. рис. 4.14),тобто графік w= w(  ).
).
Графік часу t руху у функції кута може бути побудований, якщо використати умову w =d  /dt, оскільки будь-який проміжок часу від початку руху до даного моменту часу tі дорівнює:
/dt, оскільки будь-який проміжок часу від початку руху до даного моменту часу tі дорівнює:
Інтеграл у правій частині формули (4.61) можна визначити графічно, якщо побудувати графік величини w(  ) у функції кута
) у функції кута  , оскільки відома функція w=w(
, оскільки відома функція w=w(  ). За графіками w = w(
). За графіками w = w(  ) і t= t(
) і t= t(  ) можна побудувати графік w=w(
) можна побудувати графік w=w(  ). Кутове прискорення є ланки зведення визначається графічним диференціюванням функції w= w(t).
). Кутове прискорення є ланки зведення визначається графічним диференціюванням функції w= w(t).
Знаючи кутову швидкість w і кутове прискорення  ланки зведення, можна визначити швидкості, прискорення і сили інерції окремих ланок, а також виконати силовий розрахунок механізму в умовах нерівномірного обертового руху ланки зведення.
ланки зведення, можна визначити швидкості, прискорення і сили інерції окремих ланок, а також виконати силовий розрахунок механізму в умовах нерівномірного обертового руху ланки зведення.
Таким чином, за допомогою кривої Віттенбауера можна повністю дослідити рух машинного агрегата при силах, що залежать від положення ланки зведення.
Питання для самоперевірки
1. Основні задачі динамічного дослідження механізмів. 2. Поняття про силу. Які сипи відносяться до рушійних, сі які до корисного і шкідливого опору9 3. Запишіть формули дія визначення роботи і потужності сили (моменту). 4. Що розуміють під механічною характеристикою машини 9 5. Як визначити величину й напрямок сичи (моменту) інерції? 6. Які задачі силового розрахунку механізмів і його практичне значення? 7. З якою метою в систему діючих сил вводять сипи (моменти) сип інерції? Принцип Даламбера. 8. Яку систему називають статично визначеною? Яка система є статично визначеною в механізмах? 9. Яка послідовність силового розрахунку механізмів? 10. Що наперед відомо про напрямок, величину і точку прикладання реакцій в поступальній, обертовій парах V класу та вищій парі IVкласу (без врахування сил тертя). 11. Методика силового розрахунку структурних груп і механізму І класу. Поняття про зрівноважувальну сипу (момент). Яким способом можна визначити зрівноважувальну силу. Сформулюйте правило важеля М.Є.Жуковського. 12. Що розуміють під зведеною сипаю (моментом) і зведеною масою (моментом інерції). 3 яких умов їх визначають. Чи можна використати правило важеля М.Є.Жуковського для визначення зведеної сили. 13. Чому зведена маса (або момент інерції), наприклад, для важільного механізму змінюється із зміною положення ланки зведення, а для зубчастого механізму сили. Чи змінюється зведена маса при зміні швидкості ланки зведення. 14. Запишіть рівняння руху машини в формі інтегралу енергії та диференціальній формі. На підставі якого закону одержують ці рівняння? 15. Періоди руху машини. Що називають холостим ходом машини? Запишіть рівняння руху для кожного з періодів. 16. Дайте визначення механічного ККД і коефіцієнта втрат. Чи може механічний ККД реальної машини бути більшим або рівним одиниці. Чим відрізняється миттєвий ККД від циклового. 17. Чим характеризується ефективність використання енергії в машинах. 18. Як визначити ККД машини, якщо відомі ККД окремих механізмів, що входять до її складу? 19. Як визначити методом Віттенбауера дійсну швидкість руху ланки зведення?
Розділ 5
Дата добавления: 2016-06-15; просмотров: 2354;
Поиск по сайту
Узнать еще
- I. Расчёт методом контурных токов.
- II. Расчёт методом суперпозиции.
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.
- Інтерпретація результатів дослідження
- Алгоритм вычисления ПХ классическим методом
- Алгоритм вычисления ПХ операторным методом
- Алгоритм отделения корней методом последовательного перебора
- Алгоритм расчета переходного процесса классическим методом

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
