Кінематичні пари та їхня класифікація
Кінематична пара є рухоме з'єднання двох ланок, які стикаються. Можливі з'єднання ланок у кінематичні пари дуже різноманітні. Наприклад, на рис. 2.1 зображено так звану однорухому обертову (обертальну) кінематичну пару, в якій ланки А і В з'єднані за допомогою двох циліндричних поверхонь. Бурти тіла А (вала) обмежують відносний поступальний рух тіл вздовж осі х-х, але не заважають їхньому відносному обертовому (обертальному) руху. На рис. 2.2 зображено схему іншого способу сполучення елементів ланок А і В. Ця кінематична пара допускає відносне перекочування, ковзання і вертіння.
Таким чином, на відносний рух кожної ланки кінематичної пари накладаються певні обмеження, які залежать від способу сполучення ланок кінематичної пари. Ці обмеження будемо називати умовами зв'язкув кінематичних парах.
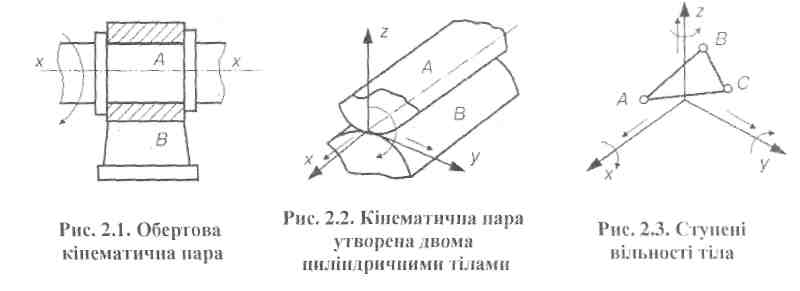
Які ж зв'язки і в якій кількості можуть бути накладені на відносний рух ланок кінематичної пари? Як відомо, у загальному випадку всяке абсолютно тверде тіло АВС (рис. 2.3), що вільно рухається в просторі, має шість ступенів вільності. Рух такого тіла можна розглядати як обертання навколо осей х, у, і та ковзання вздовж цих самих осей. Таким чином, тіло АВС матиме шість видів незалежних можливих рухів: три обертові і три поступальні.
Входження ланки в кінематичну пару з іншою ланкою накладає на відносні рухи цих ланок певні умови зв'язку. Очевидно, що число цих умов зв'язку може бути тільки цілим і меншим шести, бо вже у тому випадку, коли число умов зв'язку дорівнює шести, тіло втрачає відносну рухомість. Так само число умов зв'язку не може бути меншим за одиницю, бо у цьому випадку ланки не стикаються, тобто кінематична пара не існує, маємо два тіла, що вільно рухаються в просторі.
Таким чином, число умов зв'язку, накладених на відносний рух кожної ланки кінематичної пари, змінюється в межах від 1 до 5. Тоді число ступенів вільності H ланки кінематичної пари у відносному русі може бути виражене рівнянням
H = 6 - S, (2.1)
де S - число умов зв'язку, які накладає кінематична пара на відносний рух ланок.
З (2.1) випливає, що число ступенів вільності Н ланки кінематичної пари у відносному русі може змінюватися також від 1 до 5.
Можливі рухи, які ще залишились, можуть бути або незалежними один від одного або зв'язаними один з одним будь-якими додатковими геометричними умовами, наприклад, умовою, що поворот ланки навколо осі на певний кут викликає поступальне переміщення уздовж цієї самої осі на певну відстань (гвинтова пара) і т. ін.
Решта незалежних можливих рухів характеризують число ступенів вільності ланок кінематичної пари в їх відносному русі.
Класифікація кінематичних парздійснюється за такими ознаками:
а) числом умов зв'язку, які накладаються кінематичною парою на відносний рух ланок;
б) формою елементів ланок, що утворюють кінематичну пару;
в) способом замикання ланок.
Залежно від числа умов зв'язку(класифікація І. І. Артоболевського), що накладаються кінематичною парою на відносний рух ланок, пари діляться на п'ять класів: І, II,III, IV, V.
Клас кінематичної пари визначається залежністю
S = 6-Н, 2.2)
яка витікає із залежності (2.1).
У багатьох підручниках [18, 19] дається класифікація кінематичних пар, запропонована В.В. Добровольським, згідно з якою кінематичні пари діляться за числом ступенів вільності Н на одно-, дво-, три-, чотири- і п'ятирухомі.
У табл. 2.1 наведено приклади кінематичних пар та їхні умовні позначення згідно з ГОСТ 2.770-68.
В обертовій парі (див. рис. 2.1, 2.4) ланка А може повертатися навколо осі ланки В (або, навпаки, В відносно А), а в поступальній парі рис. 2.5) - переміщатися вздовж пазу ланки В. Число ступенів вільності ланки А в її русі відносно ланки В становить Н = 1, тому число умов зв'язку S = 5, отже ці кінематичні пари V класу.
У гвинтовій парі (рис. 2.6), наприклад, при нерухомій гайці А, гвинт В може повертатися навколо осі х і одночасно переміщатися вздовж цієї самої осі. Проте ці рухи, як вже зазначено, взаємозв'язані, а тому гвинтова пара є також парою V класу.
Таблиця 2.1
Дата добавления: 2016-06-15; просмотров: 2632;
Поиск по сайту
Узнать еще
- A. Трубопроводная обвязка окружения испарителя.
- Автоматическое регулирование заполнения испарителя
- Антигепариновый фактор тромбоцитов (фактор 4 тромбоцитов, ф.4, PF4)
- Антитромбин и гепарин
- Бал в Мулен де ла Галетт, Ренуар, 1876, Музей Орсе, Париж
- Борьба за отмену условий Парижского мира 1856 г.
- В этой системе спариваний каждое животное вяжется дважды: сын спаривается с матерью и с собственной дочерью, рожденной от матери
- Вантажі та їх класифікація

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
