Структурні формули кінематичних ланцюгів
Основи теорії структури кінематичних ланцюгів закладені в праці видатного російського вченого професора П.І.Сомова, опублікованій у 1887 р., і розвинуті радянськими вченими. Будемо дотримуватися в основному методів, які розроблені ними [1].
Раніше було встановлено, що коли на рух ланки у просторі не накладено ніяких умов зв'язку, то вона має шістьступенів вільності. Тоді, якщо число ланок кінематичного ланцюга дорівнює k, то загальне число ступенів вільності які мають k ланок до їхнього з'єднання в кінематичні пари, дорівнює 6k. Кожна кінематична пара накладає різне число зв'язків на.відносний рух ланок, що залежить від класу пари (див. п. 2.1). Позначимо число пар І класу, що входять до складу ланцюга,. Через р1 П -р2, III - рз, IV –р4 V-р5. Клас кінематичної пари визначається числом умов зв'язку, які накладає кожна кінематична пара на відносний рух ланок (див. табл. 2.1). Для визначення загального числа ступенів вільності ланок кінематичного ланцюга треба з 6k ступенів вільності, що їх ланки мали до того як увійшли до кінематичної пари, вилучити ті ступені вільності, які віднімають кінематичні пари. З табл. 2.1 видно, що одна пара І класу накладає на відносний рух ланок одну умову зв'язку (S= 1), II класу-дві (S=2) іт.д. Тоді число ступенів вільності Н, що їх має кінематичний ланцюг
Н = 6k- 5р5 - 4р4 - Зр3 - 2р2 –р1. (2.3)
Оскільки в механізмах одна ланка нерухома, тому при вивченні руху всіх ланок механізму їхні абсолютні переміщення розглядаємо як такі, що відбуваються відносно однієї з ланок, прийнятої за нерухому. Якщо одна з ланок кінематичного ланцюга буде нерухомою, то загальне число ступенів вільності ланок ланцюга зменшиться на шість, тобто число ступенів вільності (рухомості) відносно нерухомої ланки
W = Н -6. (2.4)
Підставляючи у (2.4) замість Н його вираз з (2.3), одержимо
W= 6(k - 1) - 5р5 -4р4 -3p3 -2р2 –р1. (2.5)
Якщо в (2.5) величину k-1 позначити п, то дістанемо
W = 6п - 5р5-4р4 - Зр3 - 2р2 –р1, (2.6)
де п - число рухомихланок кінематичного ланцюга.
Формула (2.6) має назву формули рухомостіабо структурної формули кінематичного ланцюга загального вигляду.
Формула (2.6) вперше, у дещо іншому вигляді, була одержана проф. П.І. Сомовим і розвинута проф. А.П. Малишевим, а тому носить назву формули Сомова - Малишева.
Застосування цієї формули можливе тільки в тому випадку, коли на рухи ланок, які входять до складу механізму, не накладено будь-яких загальних додаткових умов. Ці умови, загальні для всього механізму в цілому, можуть бути дуже різноманітні. Так, можна поставити вимогу, щоб у механізмі, який складається з самих обертових пар V класу, осі всіх цих пар були паралельні, перетиналися в одній точці або перетиналися у двох точках і т.п. Виявляється, що такі додаткові вимоги істотно змінюють характер руху механізму і змінюють відповідно вигляд структурної формули механізму.
Нехай, наприклад, у механізмі, який складається з обертових пар V класу, осі всіх пар паралельні (рис. 2. 20).
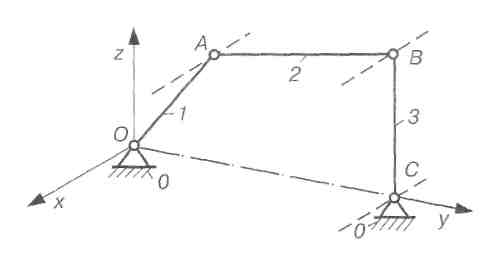
Рис. 2.20. Шарнірний чотириланковий механізм з паралельними осями шарнірів
Виберемо систему координат хуz так, щоб напрям осі х збігався з напрямом осей пар, а осі у і z лежали у площині, перпендикулярній до осей пар. Тоді неважко переконатися, що в цьому випадку ланки механізму ОАВС рухатимуться паралельно загальній площині, яка містить осі у і z, тобто маємо так званий плоский механізм. Які загальні обмеження накладено на рухи всіх ланок механізму умовою паралельності осей всіх кінематичних пар. Ці обмеження будуть такі. Ланки механізму не можуть мати обертового руху навколо осей у і z і поступального руху вздовж осі х, тобто з шести можливих рухів три не можуть бути здійснені.
Якщо на рух усіх ланок механізму в цілому накладено три загальні обмеження, то, очевидно, цю обставину треба взяти до уваги, підраховуючи ступені вільності окремих ланок і рухомості механізму в цілому. Дійсно, якщо в загальному випадку число ступенів вільності рухомих ланок механізму дорівнює 6n, то для плоского механізму - (6 - 3)п = 3n, тобто тіло в плоскому русі має три ступеня вільності (два поступальні вздовж осей у і z, один обертовий навколо осі х). Відповідно з п'яти зв'язків, які накладає пара V класу, у цьому механізмі вона накладатиме тільки 5 - 3 = 2, бо три зв'язки вже накладено умовою паралельності осей пар, і т. п. Структурна формула механізму (2. 6) тоді перепишеться так:
W = (6 - 3)n - (5 - 3)р5 - (4 - 3)р4- (3 - 3)р3.
Тобто ступені вільності(рухомості) плоского механізму
W=3п-2р5-р4 (2.7)
Це є структурна формула для плоских механізмів загального вигляду, або формула Чебишева.
До складу плоских механізмів можуть входити тільки пари IV і V класів, причому пари IV класу - вищі, V - нижчі.
З розглянутого прикладу зрозуміло, що коли на рух усіх ланок механізму в цілому накладено якесь загальне для всього механізму число зв'язків, то число цих загальних зв'язків із структурної формули механізму (2.6) треба вилучити, віднявши число цих зв'язків із числа ступенів вільності всіх рухомих ланок механізму і з числа умов зв'язку всіх кінематичних пар, що входять до складу механізму.
Залежно від числа вказаних загальних зв'язків, накладених на рух усіх ланок механізму, всі механізми ділять на п'ять сімей. Номер сім'ї визначається числом цих загальних зв'язків.
Тепер з'ясуємо, який зв'язок існує між ступенями вільності W і визначеністю руху ланок механізму. Для цього розглянемо два приклади. На рис. 2.21 зображено схему чотириланкового кінематичного ланцюга, до складу якого входить три рухомі ланки (n=3), чотири обертові кінематичні пари V класу (p5=4). Тоді ступені вільності такого кінематичного ланцюга можна визначити за формулою Чебишева (р4= 0):
W = Зп - 2р5-р4 = 3 * 3 - 2 *4 - 0 = 1.
Якщо будь-якій ланці, наприклад АВ, надати закон руху, у даному випадку обертового, то всі інші ланки ВС і СО будуть мати також цілком визначений рух.
Як відомо, положення твердого тіла, яке вільно рухається у просторі, визначається шістьома незалежними координатами. !х прийнято називати узагальненими,тому що вони визначають положення всього твердого тіла Аналогічно узагальненими координатами механізмуназивають незалежні між собою лінійні або кутові координати, які визначають положення усіх ланок механізму відносно стояка У даному випадку (рис. 2.21) за узагальнену координату можна прийняти кут повороту кривошипа фі тому, що положення ланки 1 визначає положення усіх інших рухомих ланок шарнірного чоти-риланкового механізму.
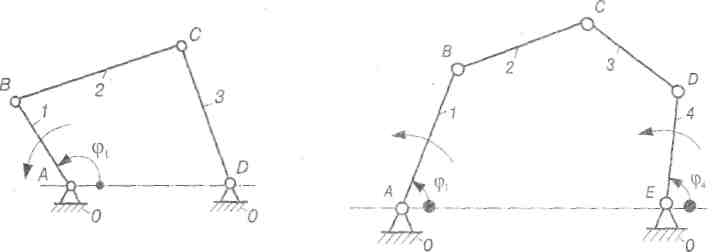
Рис. 2.21. Шарнірний чотириланковий Рис. 2.22 Шарнірний пятиланковий
Механізм механізм
Ланка, якій приписують одну або кілька узагальнених координат, називається початковоюЦей термін пов'язаний з тим, що знаходження положень усіх ланок механізму починають із знаходження положень початкових ланок.
Для кінематичного ланцюга, схему якого зображено на рис. 2.22, ступінь вільності (п = 4, р5 = 5 , р4 = 0)
W=3 *4-2*5-0 = 2.
Якщо в цьому ланцюгу задано лише положення ланки АВ, то очевидно, що положення решти рухомих ланок буде невизначеним. Коли ж задати ще положення іншої ланки, наприклад, ланки 4, кутом ф4, то всі лайки механізму будуть мати цілком визначений рух Отже, у механізмі, зображеному на рис. 2.22, повинно бути дві початкові ланки,
Таким чином, ступені вільності кінематичного ланцюга відносно стояка визначають кількість початкових ланок механізму. Останні можуть збігатися з вхідними ланками механізму, а можуть і не збігатися. Добір початкової ланки визначається зручністю визначення положень ланок механізму, зручністю його аналізу.
На основі наведеного можна показати, як із кінематичного ланцюга одержати механізм. Для цього необхідно одну з ланок ланцюга зробити нерухомою (стояком), підрахувати ступені вільності і залежно від їхньої кількості одній або кільком ланкам задати закон руху (див. рис. 2.21, 2. 22).
Початкові ланки надалі будемо показувати круговими (або прямими) стрілками.
2.4. Зайві ступені вільностій умови зв'язку
Під час дослідження структури механізмів можуть виявитися ступені вільності та умови зв'язку, що не впливають на рухомість механізму в цілому. Такі ступені вільності й умови зв'язку називають зайвими.Як приклад, на рис. 2.23 зображено схему кулачкового механізму до складу якого входить 0 - стояк, 1 - кулачок, 2 - штовхач, 3 - ролик.
Стояк і кулачок утворюють обертову пару V класу, кулачок і ролик - пару IV класу, штовхач і стояк - поступальну пару V класу, штовхач і ролик - обертову пару V класу. Тоді, виходячи з числа рухомих ланок і кінематичних пар, ступінь вільності механізму за формулою Чебишева:
W = 3n - 2р5 - р4 = 3 * 3 - 2 * 3 - 1 = 2.
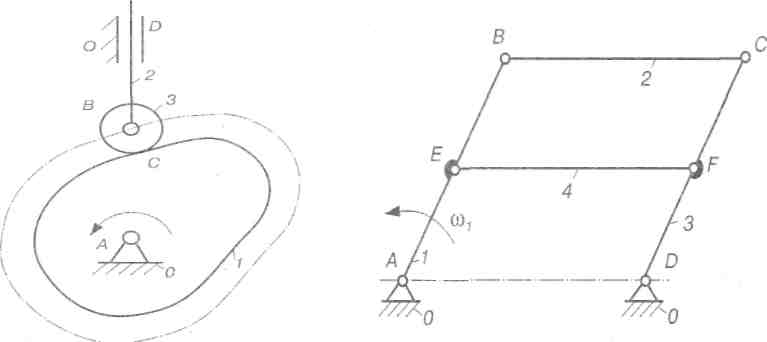
Рис. 2.23. Кулачковий Рис. 2.24. Механізм паралелограма
Дата добавления: 2016-06-15; просмотров: 3007;
Поиск по сайту
Узнать еще
- Визначення обсягів економічної інформації. Структурні одиниці, кодування економічної інформації
- Вторая формулировка.
- Выявление противоречия и формулирование проблемы - первый этап исследования
- Дослідження руху механізмів методом кінематичних діаграм
- Дослідження руху механізмів методом кінематичних діаграм
- Кто сформулировал и доказал теорему устойчивости для линеаризованных уравнений?
- Ланки та кінематичні пари . Класифікація кінематичних пар
- Общая формулировка второго закона термодинамики

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
