Основний принцип утворення механізмів
Основний принцип утворення механізмів, який вперше був сформульований у 1914 р. російським вченим Л.В. Ассуром, розкриває не тільки методику утворення механізмів шляхом послідовного приєднання кінематичних ланцюгів, але й становить основу найраціональнішої класифікації механізмів. Цей принцип полягає в наступному.
Будь-який механізм можна одержати, якщо до початкової ланки (або початкових ланок) і стояка послідовно приєднувати кінематичні ланцюги з нульовим ступенем вільності.
Справді, як це було показано вище, до складу кожного механізм}' входять нерухома ланка (стояк), початкові ланки, тобто ланки, закони руху яких задано і від яких залежать закони руху всіх інших ланок Отже, приступаючи до створення механізму бажаного ступеня вільності, закріпляємо одну з ланок (утворюємо стояк) і вводимо у кінематичні пари з цією ланкою початкові ланки за кількістю ступенів вільності, які повинен мати механізм. При цьому кожна початкова ланка повинна мати тільки один ступінь вільності.
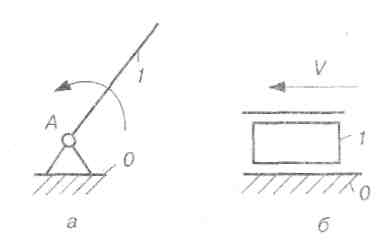
Рис. 2.26. Механізми І класу:
а) з кривошипом; б) з повзуном
Назвемо умовно початкову лапку і стояк, які утворюють кінематичну пару V класу, механізмом І класу. На рис. 2.26 зображено механізми І класу, початкові ланки яких утворюють із стояком обертову (рис. 2.26, а) або поступальну (рис. 2.26, б) пару. Щоб одержати механізм потрібного ступеня вільності, необхідно до механізму (механізмів) ї класу приєднати систему ланок, яка становить один або кілька кінематичних ланцюгів з нульовим ступенем вільності. Остання умова випливає з того, що весь механізм повинен мати ступінь вільності, що дорівнює сумі ступенів вільності механізмів 3 класу. Як приклад, розглянемо плоский механізм, зображений на рис. 2.27. Ступінь вільності цього механізму можна визначити за формулою Чебишева
W = Зn - 2р5 -р4 =3*5 - 2*7 - 0= 1,
де число рухомих ланок п = 5 , число пар V класу р5=7 і число пар IV класу р4= 0.
Якщо прийняти стояк 0 і ланку 1 за механізм І класу (рис. 2.27, б), то ланки 2-5 утворюють систему ланок, що мають нульовий ступінь вільності (n = 4, р5 = 6).
Неважко побачити, що кінематичний ланцюг з ланок 2-5 можна поділити на два кінематичні ланцюги: один, що складається з ланок 2-3 (рис. 2.27, в), і другий, що складається з ланок 4-5 (рис. 27.2,г). Кожний з цих кінематичних ланцюгів, що складається з двох ланок і трьох кінематичних пар V класу, має ступінь вільності Wгр, який дорівнює нулю. Розбити ці ланцюги на простіші кінематичні ланцюги, що мали б нульовий ступінь вільності, неможливо.
Кінематичний ланцюг, який після приєднання його вільними елементами кінематичних пар до стояка, має нульовий ступінь вільності і який не можна роз'єднати на простіші кінематичні ланцюги нульового ступеня вільності, називається структурною групою або групою Ассура.
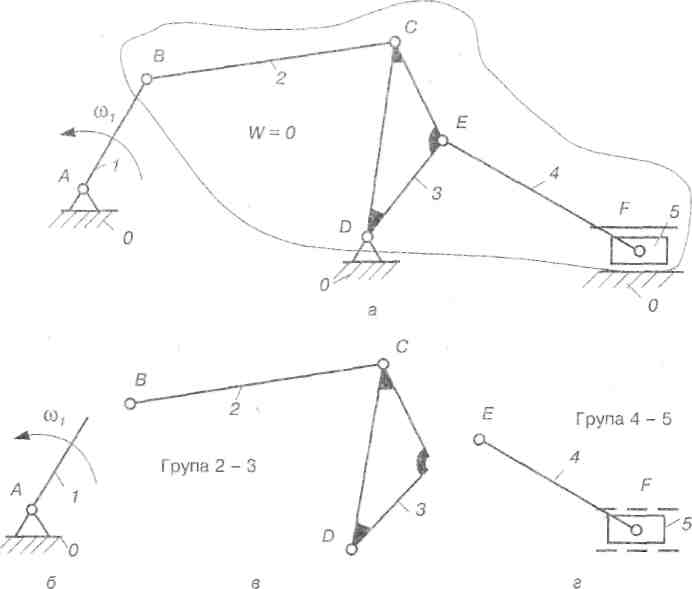
Рис. 2.27. До основного принципу утворення механізмів
Таким чином, плоский механізм, зображений на рис. 2.27,а, який має один ступінь вільності, можна розглядати як такий, що утворений способом послідовного приєднання до механізму І класу двох груп: групи 2-3 і групи 4-5. Тепер молена дати таке визначення основному принципу утворення механізмів.
Будь-який механізм можна одержати, якщо до механізму (механізмів) І класу послідовно приєднувати структурні групи.
При послідовному приєднанні груп необхідно керуватися певними правилами. При утворенні механізму з одним ступенем вільності перша група приєднується вільними елементами ланок до початкової ланки і стояка. Наступні групи можуть приєднуватися до будь-яких ланок одержаного механізму тільки так, щоб ланки групи могли рухатися одна відносно одної. Не можна групу всіма вільними елементами приєднувати до одної ланки, тому що у цьому випадку одержимо нерухомий контур.
Структурні групи плоских механізмів задовольняють умову
Wгр = 3п-2р5-р4 = 0; (2.10)
структурні групи просторових механізмів
Wгр = 6п - 5р5-4р4-Зр3-2р2-р1 = 0. (2.11)
Як плоскі, так й просторові структурні групи використовуються не тільки при структурному синтезі, але й при аналізі механізмів.
Дата добавления: 2016-06-15; просмотров: 3525;
Поиск по сайту
Узнать еще
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Этические принципы психолога
- II. Общие методические принципы в канистерапии
- II. Получение вращающегося магнитного поля и принцип действия АД.
- II. Принцип действия и режимы работы синхронной машины
- II. Электрическая схема и принцип действия.
- III. Принцип действия
- III. Принцип удовольствия

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
