Законы регулирования
Измерение температуры: теория и практика
Термопары
Явление термоэлектричества было открыто немецким физиком Т. Зеебеком (T. Seebeck) в 1821 г. и состоит в следующем. Если соединить два проводника (термоэлектрода) из разнородных металлов или сплавов таким образом, чтобы они образовали замкнутую электрическую цепь (рис. 1), и затем поддерживать места контактов (спаи) при различной температуре, то в цепи будет протекать постоянный ток.
Говорят, что термоэлектрод А положителен по отношению к В, если ток течет от А к В в более холодном из двух контактов. Электродвижущая сила, вызывающая этот ток, называется термоЭДС Зеебека и зависит только от материала термоэлектродов и разности температур спаев.
E = α(T1 - T2),
где α — коэффициент пропорциональности (коэффициент Зеебека).
Таким образом, зная температуру одного спая (обычно ее поддерживают постоянной, например, равной 0°С) и измеряя этот ток или напряжение, можно однозначно определить неизвестную температуру другого спая.
Конструкции и материалы для изготовления термопар весьма разнообразны (рис. 2) и определяются физическими и химическими свойствами веществ, температуру которых необходимо измерять. Различают три основных типа термопар (рис. 3): с открытым контактом, с изолированным незаземленным контактом и с заземленным контактом.
Термопары с открытым контактом имеют малую коррозионную стойкость и малую постоянную времени и пригодны для измерения температуры жидкости и газа в потоке, а также твердых тел. Два других типа термопар пригодны для измерений в агрессивных средах. В таблице 2 приводятся основные типы термопар и их параметры в соответствии с международной спецификацией, а в таблице 3 — наиболее распостраненные варианты конструктивного исполнения термопар и области их применения.
Законы регулирования
1. Двухпозиционный закон регулирования – самый простой метод регулирования температуры: нагреватель включен, если текущая температура ниже задания, и отключен, если превышает задание. Для предотвращения «дребезга» вблизи заданного значения устанавливается гистерезис или, иначе, зона нечувствительности. Точность регулирования температуры в какой-то степени зависит от величины гистерезиса, чем он меньше, тем точнее регулирование, но тем чаще включается нагреватель. При управлении объектом по этому закону всегда присутствуют колебания температуры, амплитуда и период которых мало зависят от регулятора, а определяются конструкцией и параметрами объекта.
2. При трехпозиционном законе, позволяющем уменьшить колебания температуры, используется регулирующее устройство в двухпозиционном режиме, компаратор в режиме «0» и, соответственно, два выхода регулятора. Используя прямые и инверсные выходы регулирующего устройства и компаратора, а также различные соотношения между заданиями 1 и 2, можно реализовать много вариантов управления объектами, в том числе двухступенчатое регулирование, совместное использование нагревателей и охладителей и др.
3. ПИД (пропорционально интегрально дифференциальный закон) – закон регулирования обеспечивает значительно более высокую точность поддержания температуры, чем предыдущие. В этом случае регулятор учитывает величину и продолжительность отклонения, а также скорость его изменения. Качество регулирования зависит, прежде всего, от того, насколько оптимально коэффициенты ПИД –закона соответствуют свойствам объекта. Выходной сигнал регулирующего устройства может быть двух видов:
- аналоговый (0…5 мА или 4…20 мА), который подается на исполнительные устройства, имеющие соответствующий вход; как правило эти устройства представляют собой мощные фазоимпульсные модуляторы, позволяющие плавно изменять ток нагрузки;
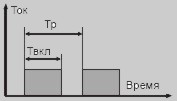
- широтно-модулированный (ШИМ), при котором мощность, выделяемая нагревателем, пропорциональна Твкл / Тр, где Тр – период регулирования, Твкл – время включения нагрузки (см. рис.). Период регулирования может быть выбран фиксированным или равным С/20, где С – постоянная времени интегрирования ПИД – закона. Фиксированный период регулирования (0,8 сек. при разрешении 1 оС или 1,6 сек. при разрешении 0,1 и 0,01 оС) устанавливается при использовании нагревателей, обладающих небольшой тепловой инерцией. Вид выходного сигнала при ПИД – законе определяется первым параметром меню РЕЖИМ
Ограничение мощности - максимальный уровень мощности, возможный при работе регулятора; выражается в процентах от мощности, выделяемой при постоянно подключенном нагревателе/охладителе. Установка этого параметра меньше 100% применяется для объектов, не допускающих подачу полной мощности.
Коэффициенты ПИД - закона регулирования, к которым относятся диапазон пропорциональности (b) и постоянная времени интегрирования (С) определяют точность выполнения термической программы. Оптимальные значения коэффициентов зависят от конструкции объекта и первичного преобразователя, массы загрузки, рабочей температуры. Чем больше температура, тем меньше должны быть значения b и С при прочих равных условиях. Чем больше загрузка, тем меньше b и больше С, однако, коэффициент С слабо зависит от загрузки. Значения коэффициентов могут быть определены регулятором с помощью режима самонастройки или введены вручную, если они известны. Диапазон коэффициентов, а также шаг установки зависят от выбранной разрешающей способности индикации температуры
| <== предыдущая лекция | | | следующая лекция ==> |
| Максимальная токовая защита с пуском от реле напряжения | | | Спирты фенолы и простые эфиры. |
Дата добавления: 2016-06-15; просмотров: 2147;
Поиск по сайту
Узнать еще
- I.1.4 ИДЕАЛЬНЫЙ ГАЗ. ГАЗОВЫЕ ЗАКОНЫ. УРАВНЕНИЕ СОСТОЯНИЯ ИДЕАЛЬНОГО ГАЗА
- II.1.1 ОСНОВНЫЕ ЗАКОНЫ И ФОРМУЛЫ
- II.2.1 ОСНОВНЫЕ ЗАКОНЫ И ФОРМУЛЫ
- II.3.1 ОСНОВНЫЕ ЗАКОНЫ И ФОРМУЛЫ
- II.4.1 ОСНОВНЫЕ ЗАКОНЫ И ФОРМУЛЫ
- II.5.1 ОСНОВНЫЕ ЗАКОНЫ И ФОРМУЛЫ
- II.6.1 ОСНОВНЫЕ ЗАКОНЫ И ФОРМУЛЫ
- II.7.1 ОСНОВНЫЕ ЗАКОНЫ И ФОРМУЛЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
