Порядок выполнения работы
1. Изучить принцип работы и конструкцию приводов, используя описание и реальную конструкцию. При изучении конструкции необходимо снять кожух и боковые крышки манипулятора. Определить места установки основных узлов манипулятора. Обратить внимание на конструкцию дросселей и способ их регулировки, расположение амортизаторов механизмов подъема и выдвижения ИУ. При отсутствии подачи воздуха в пневмосхему (вентиль 2 закрыт, рис. 2.1) оценить вручную подвижность ИУ робота при выдвижении, подъеме и повороте, усилие страгивания из начального положения.
2. Подготовить робота к работе, для чего:
— проверить наличие масла в емкостях амортизаторов механизмов поворота и выдвижения захватного устройства. Добавить масло в случае необходимости;
— проверить наличие смазки для направляющей ИУ в соответствующей полости корпуса ИУ;
— проверить смазку трущихся поверхностей механизмов манипулятора;
— установить упоры поворота и выдвижения в крайнее положение, обеспечивающее максимальный ход движения;
— проверить, закрыт ли запорный вентиль 2 (см. рис. 2.1);
— установить зоны безопасности при работе для каждого движения: подъема, поворота, выдвижения;
— проверить настройку КЭМов по каждой степени подвижности, для чего вручную выполнить прямой и обратный ходы. При надежном срабатывании контактов на пульте управления должно засветиться табло о выполнении команды;
— проверить готовность блока подготовки воздуха, т. е. наличие необходимого количества масла в маслораспылителе, отсутствие влаги во влагоотделителе;
— открыть запорный вентиль 2;
— установить с помощью редукционного клапана давление питания пневмосистемы сжатым воздухом 0,4 МПа (4 кг/см2), контроль за величиной давления производить по манометру 5;
— включить электропитание, нажав кнопку СЕТЬ. На пульте загорается лампочка СЕТЬ;
— поставить кнопочный переключатель режимов в положение РУЧНОЙ;
— в режиме РУЧНОЕ УПРАВЛЕНИЕ проверить работу манипулятора по каждой степени подвижности, произведя 5–6 повторений на каждом движении. При этом дроссели регулирования скорости (на выходе из пневмораспределителей) должны быть максимально открыты, каждое движение должно выполняться без сбоев и затираний;
— проверить эффективность торможения ИУ манипулятора при повороте и выдвижении, не допускать резких ударов ИУ манипулятора по упорам.
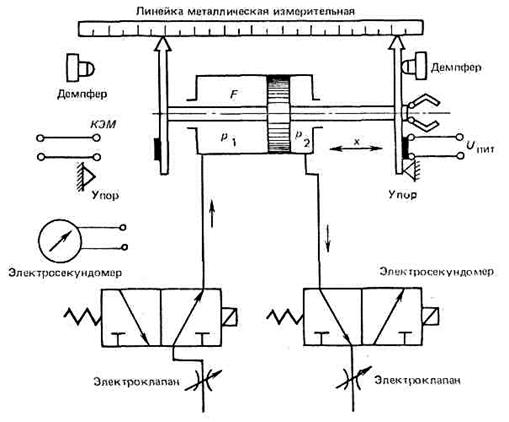
Рис. 2.7. Принципиальная схема измерений характеристик привода
При необходимости произвести регулировку дроссельной иглы демпфера.
3. В режиме РУЧНОЕ УПРАВЛЕНИЕ реализовать команды выдвижения, поворота и подъема ИУ. Определить время прямого и обратного перемещений для каждой степени подвижности. Время измерить с помощью электросекундомера. Схема измерений представлена на рис. 2.7. Срабатывание электросекундомера происходит при размыкании или замыкании КЭМов соответствующей степени подвижности. Произвести 5—6-кратное измерение времени перемещения ИУ робота от упора до упора по каждой степени подвижности.
4. Измерить максимальный ход выходного звена привода при каждом движении. Для измерения использовать обычный измерительный инструмент с метрической шкалой, цена деления 1 мм. Точность измерения хода ±0,5 мм.
5. Вычислить среднюю линейную скорость прямого и обратного ходов при подъеме и выдвижении захватного устройства.
6. Определить точность позиционирования ИУ робота при выдвижении захватного устройства, для чего: – в режиме РУЧНОЕ УПРАВЛЕНИЕ реализовать команды «Открытие захватного устройства» и «Закрытие захватного устройства», установив при этом в захватном устройстве груз, имеющий держатель для иглы (рис. 2.8);
— выполнить команды «Движение вперед» и «Движение назад». С помощью иглы на координатной бумаге отметить крайнее положение центра груза;
— повторить движения прямого и обратного ходов 10—15 раз;
— определить точность позиционирования б из соотношения

где А – максимальная зона рассеяния проколов; d – диаметр иглы;
— полученный результат сравнить с техническими данными робота.
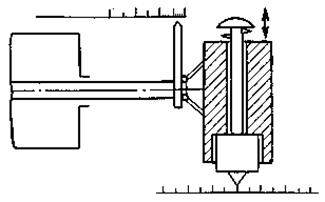
Рис. 2.8. Схема определения точности позиционирования
Содержание отчета
1. Схема пневматического привода.
2. Условия проведения и объем выполненных работ.
3. Полученные результаты.
4. Анализ результатов и выводы.
Литература
1. Юревич, Е. И. Основы робототехники: учеб. пособие для вузов/ Е. Ю. Юревич. – 2-е изд. – СПб.: БХВ-Петербург, 2005.
2. Робототехника и гибкие автоматизированные производства: в. 9 кн.: учеб. пособие для втузов /под ред. И.М. Макарова. – М.: Высш. шк., 1986.
Дата добавления: 2022-02-05; просмотров: 594;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- H. Разработка мер по повышению качества работы органа здравоохранения
- I. Определение условий выполнения рукописи.
- II раздел. Организация работы логопеда в группе для детей с ОНР
- II. Види виробничої документації та порядок її ведення
- II. Порядок разработки, утверждения, внесения изменений в Инструкцию по делопроизводству
- III. Порядок присвоения спортивных званий
- IV. Выполнение работы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
