Основные теоретические положения
Положение объекта в пространстве обычно определяется системой декартовых координат (рис. 1).
|
|

Рис. 1. Система координат
Манипуляторы, работающие в прямоугольной системе координат, имеют рабочую зону в форме параллелепипеда. Здесь все перемещения только поступательные. Такая система координат максимально упрощает программирование робота, так как исходное  и конечное положения
и конечное положения  обычно задаются именно в прямоугольной системе координат, и, следовательно, в этом случае не требуется пересчета программ из одной системы координат в другую.
обычно задаются именно в прямоугольной системе координат, и, следовательно, в этом случае не требуется пересчета программ из одной системы координат в другую.

|
|
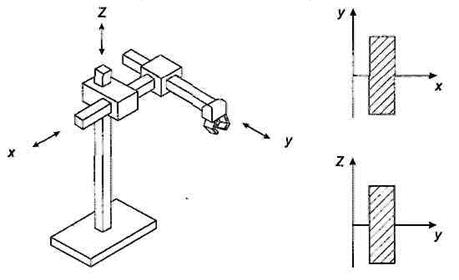
Рис. 2. Манипулятор с декартовой системой координат и его рабочая зона
В манипуляторах, работающих в цилиндрической системе координат (см. рис. 3), наряду с поступательными перемещениями, осуществляется одно угловое перемещение (по окружности). Соответственно рабочая зона ограничена цилиндрическими поверхностями.

Рис. 3. Манипулятор с цилиндрической системой координат (а) и его рабочая зона (б)
Для программирования перемещений требуется перерасчет из декартовой  в цилиндрическую систему координат
в цилиндрическую систему координат  ;
;

Тогда величина перемещений звеньев манипулятора будет
В сферической системе координат осуществляются уже 2 угловых перемещения, и рабочая зона ограничена сферическими поверхностями. Такую систему координат имеет, например, манипулятор промышленного робота, показанного на рис. 4. Манипуляторы с такой системой координат, как правило, сложнее, чем с цилиндрической системой, однако компактнее.
|
|
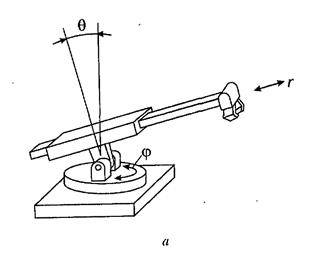


Рис. 4. Манипулятор с сферической системой координат (а) и его рабочая зона (б)
Как и для предыдущей системы координат, для программирования перемещений требуется перерасчет из декартовой  в сферическую систему координат
в сферическую систему координат  ;
;
 .
.
Тогда величина перемещений звеньев манипулятора будет
Количество дискрет при перемещении из одной точки в другую определяется отношением величины перемещений к цене дискреты. Так, например, для декартовой системы координат формулы примут следующий вид:
 .
.
Тип промышленного робота, начальное и конечное положения точек позиционирования и дискретность перемещений по степеням свободы задаются преподавателем индивидуально или студент получает данные на учебном сайте СЗТУ.
Дата добавления: 2022-02-05; просмотров: 483;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- II. Основные положения
- II. Основные характеристики микроскопа.
- II. Отклонения расположения поверхностей
- II. Языкознание и его основные разделы.
- III. Основные направления развития воспитания
- III. Основные требования к организации рассмотрения обращений граждан
- III. Основные функции ГФС России

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
