Изучение технических характеристик макета электромеханического робота
Цель работы – изучение конструкции и основных характеристик макета электромеханического робота с позиционной системой управления.
В основу лабораторных работ положено определение конструктивно-геометрических технических характеристик макета робота (рис. 1.1) на основе анализа видеоизображения.
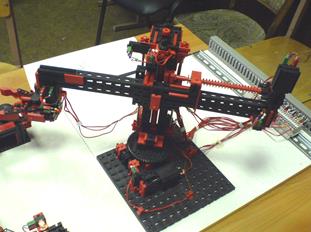
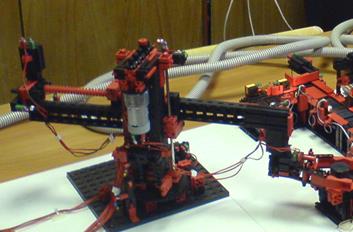
Рис. 1.1. Макет робота
Задание.Ознакомиться с основными возможностями макета ПР и определить его основные геометрико-кинематические характеристики ПР. Для выполнения задания необходимо:
1. Используя видео- и фотоизображение обслуживания промышленным роботом загрузочной и разгрузочной позиций поточной линии, передаваемое в реальном масштабе времени или в записи, ознакомиться с порядком его функционирования и основными возможностями.
2. Произвести классификацию макета промышленного робота по следующим признакам.
1. Общая характеристика:
1.1. область применения (специализированный, универсальный…);
1.2. число манипуляторов;
1.3. число степеней подвижности;
1.4. возможность передвижения;
1.5. способ установки и крепления (напольный, подвесной, пристаночный…);
1.6. система координат;
1.7. конструктивные особенности.
2. Характеристики привода:
2.1. тип привода.
3. Характеристика управления:
3.1. тип управления;
3.2. метод программирования.
4. Средства очувствления:
4.1. тип датчиков;
4.2. число каналов связи.
3. На основе масштабных изображений робота в крайних положениях по всем степеням свободы определить его основные геометрико-кинематические характеристики (рис. 1.2):
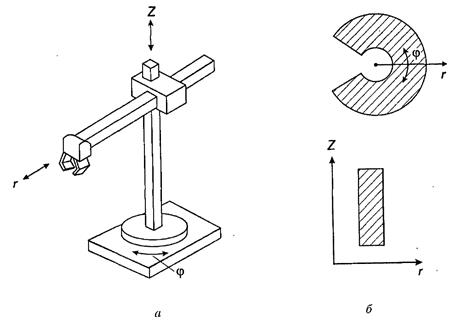
Рис. 1.2. Схема манипулятора с цилиндрической системой координат и его рабочая зона
1. Подвижность манипулятора W;
2. Рабочее пространство манипулятора (рис. 1.2);
3. Зона обслуживания манипулятора.
Содержание отчета
1. Кинематическая схема макета промышленного робота.
2. Классификация ПР по основным признакам.
3. Схема и параметры рабочего пространства и зоны обслуживания.
Литература:
1. Юревич, Е. И. Основы робототехники: учеб. пособие для вузов/ Е. Ю. Юревич. – 2-е изд. – СПб.: БХВ-Петербург, 2005.
2. Основы робототехники/ Н.В. Василенко [и др.]; под ред. К.Д. Никитина. – Томск.: МГП Раско, 1993.
Дата добавления: 2022-02-05; просмотров: 620;
Поиск по сайту
Узнать еще
- I. Изучение нового материала.
- I. Общая характеристика категории состояния как часть речи
- II. Лексико-грамматические разряды имен числительных. Их характеристика.
- II. Лексико-грамматические разряды местоимений. Их общая характеристика
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- IV. ОБЩАЯ ХАРАКТЕРИСТИКА ВИРУСОВ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
