Проверка характеристик пневматического привода робота на соответствие техническим данным
Цель работы – изучение конструкции и принципов работы пневматического привода робота, определение его характеристик.
Работа выполняется на базе промышленных роботов МП-9С. Работа позволит студентам получить практические навыки как по обслуживанию, так и по методике исследований и испытаний приводов роботов.
Пневматический робот МП-9С предназначен для автоматизации технологических процессов в промышленности. При этом исполнительное устройство робота осуществляет захват, перенос и установку детали по заданным координатам рабочей зоны.
Технические характеристики:
| Грузоподъемность | 0,2 кг |
| Выдвижение исполнительного устройства (ИУ) | 180 мм |
| Подъем ИУ | 30 мм |
| Поворот ИУ | 120° |
| Точность позиционирования | ±0,05 мм |
| Тип привода | пневматический |
| Рабочее давление воздуха | 0,4—0,5 МПа |
| Тип системы управления | цикловая |
| Число точек позиционирования по каждой степени подвижности | |
| Масса | — 40 кг |
Схема привода приведена на рис. 2.1. Функционально пневматический привод данного робота можно разделить на следующие узлы:
— узел подготовки сжатого воздуха;
— узел распределения сжатого воздуха;
— узел исполнительных двигателей;
— система передачи сжатого воздуха между устройствами привода.
Сжатый воздух через входной штуцер 1, запорный вентиль 2, влагоотделитель 3, регулятор давления 4, маслораспылитель 6 по магистралям поступает к соответствующим распределительным устройствам.
С помощью регулятора давления 4 производится настройка давления сжатого воздуха, поступающего к лентам привода.
Маслораспылитель 6 обеспечивает распыление в потоке сжатого воздуха масла, необходимого для смазки трущихся элементов исполнительных двигателей и распределителей. Контроль давления сжатого воздуха, поступающего к устройствам робота, выполняется визуально по манометру 5. Манометр установлен за регулятором давления.
Блок подготовки воздуха выполняется автономно и входит в комплект манипулятора.
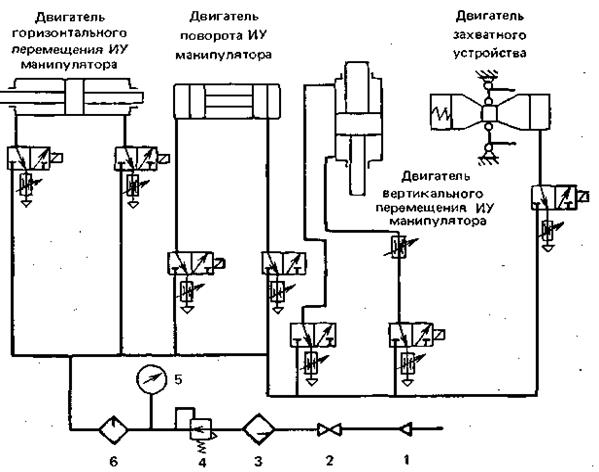
Рис. 2.1. Пневматическая схема привода
Блок распределения сжатого воздуха включает в себя устройства, с помощью которых по заданной программе можно выполнять открытие или закрытие доступа сжатого воздуха в рабочие полости исполнительных двигателей. В роботе МП-9С используются распределители клапанного типа с электроуправлением, нормально закрытые. На каждое движение ИУ в роботе установлен автономный электроклапан. Для повышения надежности робота дополнительно установлен запасной электроклапан.
В качестве исполнительных двигателей в схеме робота используются цилиндры с прямолинейным движением поршня одно- или двустороннего действия. На каждую степень подвижности предусматривается исполнительный двигатель, конструкция которого обеспечивает заданные линейные перемещения, скорости и усилия. Захватное устройство также имеет двигатель.
Подача сжатого воздуха в рабочую полость цилиндра осуществляется через открытый электроклапан, при этом выход воздуха из нерабочей полости цилиндра в атмосферу выполняется через другой открытый электроклапан.
Регулировка скорости выходного звена двигателя в пневматических приводах осуществляется путем изменения расхода сжатого воздуха на входе или выходе двигателя. Конструктивно это выполняется в виде пневматического дросселя, где проходное сечение регулируется в зависимости от требуемой скорости. В данной схеме каждый электроклапан снабжен дросселем на выходе, регулируемым поворотом регулировочного винта. Последовательность и число движений ИУ робота определяется набором программы на пульте ЭЦПУ-6030 (см. гл. 1, 3).
Сигнал о завершении заданного движения поступает с электромагнитных контактов (КЭМ). Срабатывание контактов происходит при приближении к ним постоянных магнитов, установленных на подвижных частях пневматического двигателя.
Торможение двигателя ИУ при подходе к конечному положению осуществляется гидравлическими демпферами – при выдвижении и повороте, при подъеме или опускании – за счет дросселирования сжатого воздуха на входе и выходе из цилиндра.
В корпусе манипулятора размещены механизм подъема и поворота ИУ, блок распределения воздуха, выполнены пневмо- и электроразводка. Для удобства обслуживания корпус имеет съемные кожух и две боковые крышки.
Механизм подъема (рис. 2.2) состоит из корпуса 4, штока 2, крышек 6, 7, 10. Рабочие полости цилиндра герметизируются манжетами 5, 9 и прокладками.
Особенностью механизма подъема является выполнение конструкции в виде неподвижного штока и подвижного корпуса цилиндра. Для улучшения динамики работы при подъеме и опускании поршень имеет различные рабочие площади.
Внутри штока на подшипниках 8 установлен вал 1 механизма поворота.
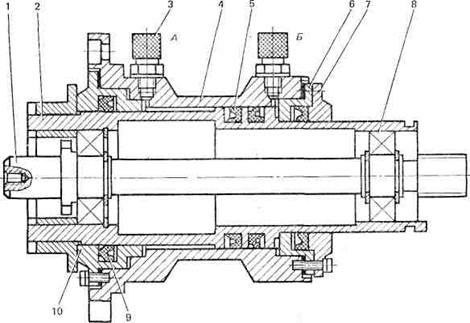
Рис. 2.2. Конструкция механизма подъема
Достижение заданного хода вертикального движения выполняется регулировкой механических упоров, которые установлены на неподвижной направляющей в корпусе манипулятора. На этих же упорах установлены КЭМы вертикального перемещения, на подвижном корпусе – соответствующие им постоянные магниты. Конструкция крепления КЭМов позволяет производить их точную регулировку для обеспечения надежного срабатывания.
При подаче сжатого воздуха через прямое концевое соединение 3 в полость А или Б корпус цилиндра 4 перемещается.
Механизм поворота (рис. 2.3) состоит из корпуса цилиндра 11, в котором перемещается шток 10. Средняя часть штока выполнена в виде рейки, зубья которой входят в зацепление с валом поворота, установленного в штоке механизма подъема. Шток 10 уплотняется манжетами 9, фланцами 1 с прокладками 2. На штоке 10 закреплена винтом 7 планка 8 с магнитом 6 на корпусе и установлены планки 3 и платы 4 с КЭМами 5.
При подаче воздуха в пневмоцилиндр через отверстия А и Б поступательное движение штока-рейки 10 преобразуется во вращательное движение вала.
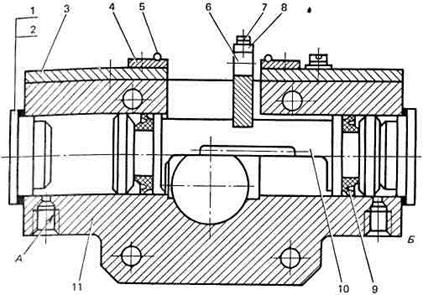
Рис. 2.3. Конструкция механизма поворота
В верхней части вала установлена муфта, предназначенная для соединения исполнительного устройства робота с валом механизма поворота. Муфта имеет упоры 2 (рис. 2.4), которые обеспечивают заданный угол поворота. Регулировка угла поворота выполняется с помощью упоров 4. При осуществлении поворота упор 2 касается выступа 3 гидравлического демпфера и дожимает его до конечного положения. Исполнительное устройство робота (рис. 2.5) обеспечивает выдвижение захватного устройства в рабочую зону. Конструкция ИУ содержит следующие основные детали: корпус 13, шток с поршнями 10, направляющую 17, основные упоры 8 и 15, регулировочные упоры 7 и 14 с винтом 6, амортизатор 12. В корпусе 13 установлена гильза 2 с уплотнением 3, которая служит корпусом цилиндра исполнительного двигателя ИУ. В гильзе перемещается шток с поршнем 10. Шток уплотняется манжетой 5. Сжатый воздух подводится к прямому концевому соединению 11. Направляющая 17 служит ограничителем вращения штока захватного устройства вокруг оси. Смазка направляющей производится через масленку 16.
Под крышкой 1 корпуса установлены КЭМы 4, на упорах 8 и 15 – магниты 9.
При подаче сжатого воздуха в соответствующую полость цилиндра шток с направляющей 17 и упорами 7, 8, 14, 15 перемещается. На конечном участке движения упоры 8 или 15 касаются штока амортизатора 12 и перемещают его до конечного положения. Одновременно магнит 9 подходит к КЭМу 4, который срабатывает и выдает сигнал об окончании движения.
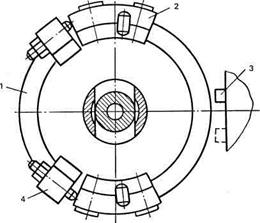
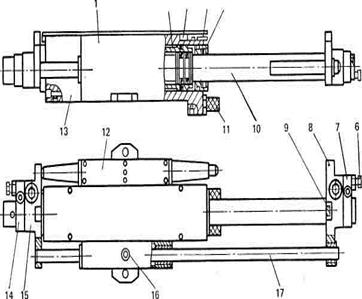
| Рис. 2.4. Расположение упоров механизма поворота | Рис. 2.5. Конструкция исполнительного устройства робота |
Перемещение ИУ регулируется соответствующей установкой упоров 7, 8, 14, 15. С помощью микровинта 6 выполняется точная настройка хода штока. Гидравлические демпферы угла поворота и выдвижения захватного устройства по принципу действия аналогичны: энергия движения механических элементов преобразуется в энергию дросселирования потока жидкости через зазор с переменным проходным сечением.
Схема демпфера представлена на рис. 2.6. Поршни 1 и 3 жестко соединены штоком 2. Шток исполнительного двигателя при подходе к заданному положению нажимает упором на поршень 1 демпфера. Поршни 1 и 3 под действием движущей силы перемещаются вправо, при этом из полости А жидкость вытесняется и поступает в полость В через зазор а. Первоначальное заполненение полостей А и Б жидкостью производится из емкости С через каналы т и п, которые затем перекрываются поршнем демпфера при соответствующем направлении движения.
При перетекании жидкости через зазор а, который представляет собой местное сужение потока, происходит потеря энергии. Как видно из схемы, поток жидкости, движущейся из полости А в полость В, получает энергию от поршня 1. Чем больше вязкость жидкости и меньше площадь зазора а, тем больше требуется усилий и тем значительнее демпфирование.
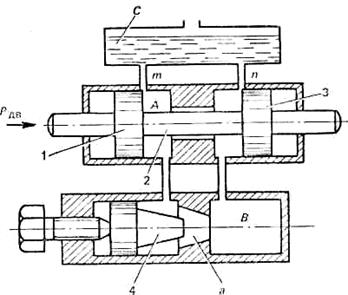
Рис. 2.6. Принципиальная схема демпфирующего устройства
В качестве рабочей жидкости в демпферах используется минеральное масло. Зазор а регулируется перемещением дросселирующей иглы 4.
Привод захватного устройства выполнен в виде цилиндра с прямолинейным движением поршня одностороннего действия. При подаче воздуха в правую полость цилиндра (см. рис. 2.1) поршень движется влево, при этом скосами на внешней стороне поршня действует на рычаги захватного устройства, сжимая его. При снятии давления воздуха обратный ход поршня выполняется под действием возвратной пружины. При этом рычаги захватного устройства разжимаются под действием пружин рычагов. Размах рычагов можно регулировать специально предусмотренными винтами.
Некоторые сведения из теории и практики использования пневмоприводов
В роботах, использующих в качестве рабочего тела сжатый воздух, широко применяют конструкцию исполнительных двигателей в виде цилиндров с прямолинейным поступательным движением поршня. Такие двигатели относятся к классу объемных машин, где рабочий процесс основан на попеременном заполнении рабочей камеры рабочим телом (в данном случае сжатым воздухом) и вытеснением его из камеры.
В пневматических двигателях выходное звено – поршень со штоком – движется за счет энергии, полученной от потока сжатого воздуха.
Под рабочей камерой объемного двигателя понимается ограниченное пространство внутри машины, периодически изменяющее объем и попеременно сообщающееся с каналами входа и выхода рабочего тела.
В пневматических приводах в качестве рабочего тела используется газ – сжатый воздух. Основными характеристиками состояния газа являются: абсолютное давление р, плотность q и абсолютная температура Т. В дальнейшем для простоты расчетов принимается, что состоянием рабочего тела в пневматических приводах является состояние идеального газа, которое описывается уравнением Клапейрона [3]:

где R – газовая постоянная; v = V/m; V—объем газа; Т – масса газа объемом V.
Возможны частные случаи этого состояния.
Для определения основных зависимостей при расчетах конструкции и динамики пневматического привода принимается, что имеет место режим одномерного течения идеального газа без трения и теплообмена с окружающей средой.
Наиболее простым и распространенным способом регулирования скорости в пневматических приводах является регулирование посредством дросселя переменного сечения на выходе из двигателя.
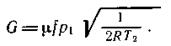
В практических расчетах пневматических устройств для определения массового расхода газа через дроссели используют следующую зависимость:
 , (2.1)
, (2.1)
где μ – коэффициент расхода, учитывающий потери энергии потока при прохождении местных сопротивлений; на практике обычно принимают μ =0,6‑0,8; f – площадь проходного сечения дросселя; р1 – давление на входе в дроссель; р2 – давление на выходе из дросселя (p2 = 0,1 МПа – атмосферное давление); R – газовая постоянная воздуха; R = 287,14 Дж/(кг-К); Т2 – абсолютная температура воздуха после дросселя, К.
Данная зависимость справедлива для режима истечения газа при p1/p2<0,5, т. е. для докритического режима истечения.
Для надкритического режима истечения, когда p2/p1<0,5, массовый расход газа определяется зависимостью
 (2.2)
(2.2)
На практике для пневматических роботов используют давление сжатого воздуха на входе в двигатель р = 0,4-0,5 МПа.
Скорость поршня двигателя и расход воздуха связаны прямой зависимостью
 (2.3)
(2.3)
где х – скорость поршня; Q – объемный расход воздуха; F – эффективная площадь поршня.
Из анализа зависимостей (2.1) – (2.3) можно установить, что скорость поршня двигателя робота зависит (при прочих равных условиях) от площади проходного сечения дросселя на выходе, давления питания сжатым воздухом и перепада давления на поршне.
Для обеспечения заданной скорости необходимо выполнять настройку дросселя для каждого значения нагрузки.
Как показывают расчеты и условия эксплуатации, регулирование скорости поршня целесообразно выполнять путем дросселирования сжатого воздуха на выходе из двигателя. Это позволяет получить лучшие динамические характеристики привода.
Дата добавления: 2022-02-05; просмотров: 613;
Поиск по сайту
Узнать еще
- I. Общая характеристика категории состояния как часть речи
- II. Лексико-грамматические разряды имен числительных. Их характеристика.
- II. Лексико-грамматические разряды местоимений. Их общая характеристика
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- IV. ОБЩАЯ ХАРАКТЕРИСТИКА ВИРУСОВ
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
